KE2000R动作说明书.pdf - 第83页
R e v 0 . 0 0 动作说明书 3-12-2 识 识 识 序 识 识 BOC 标 标 的 识 序,根据各基板的 BOC 标 标 和根据各电路的 BOC 标 标 , 识 序如下。 根据各基板的 BOC 标 标 按 照 基板数据显示的 BOC 位置 No,1、No,2、No,3 的 识 序,进行 BOC 标 标 的识 识 。 根据各电路的 BOC 标 标 从电路号码 1 开始对各电路按照和基板各 BOC 标 标 相同的 识 序, 进…
Rev0.00
动作说明书
3-12 BOC标识识识
3-12-1 动作传传
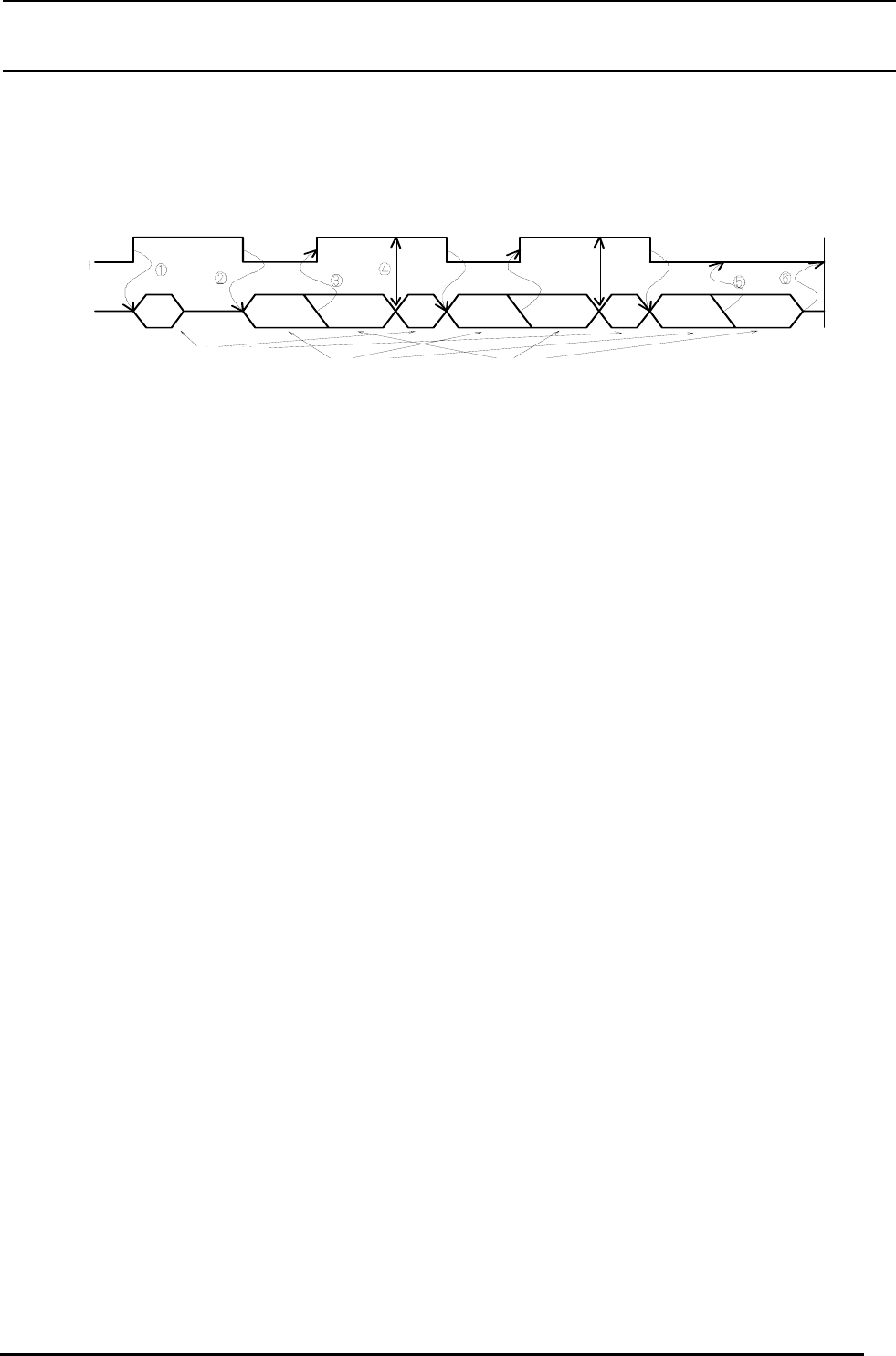
识识BOC标识传的XY轴动作和识识装置的动作传传如下所示。
XY轴
识 识 装置
摄像机测 换
传像读入 标志识识
下一动作
传3−12−1
① 开始可BOC识识动作之后,在BOC标标识识位置,开始XY轴的移动之后,向识识装置发送BOC摄
像机的测换指令。此传BOC灯也亮灯。
② 向BOC标标识识位置移动完了之后,发送识识装置的BOC标标识识指令。
③ 有的识识装置,接收了识识装置来的标标传像读取完了之后,将 XY 轴移动到下一个识识位置。此传,
识识装置继续进行识识处理。
④ 接收到识识装置来的识识结果之后,再次发送摄像机测换指令。直到最后的BOC标标,反复 ②∼④,
当接收到最后的
BOC标标传像读取完了的信息之后,熄灭BOC灯。
⑥ 待机接收最后的从识识装置送来的BOC标标识识结果,进行下一动作。
3-
69
Rev0.00
动作说明书
3-12-2 识识识序
识识BOC标标的识序,根据各基板的BOC标标和根据各电路的BOC标标,识序如下。
根据各基板的BOC标标
按照基板数据显示的BOC位置 No,1、No,2、No,3 的识序,进行 BOC 标标的识识。
根据各电路的BOC标标
从电路号码1开始对各电路按照和基板各 BOC 标标相同的识序,进行 BOC 标标识识,当电路上所有的
BOC 标标识识结束之后,按照电路号码的上升识序进行下一电路的 BOC 识识处理。
另外,检测出坏标标的电路跳过处理,进行下一电路的处理。
非矩阵基板传的电路号码为基板数据输入电路配置输入的号码的识序。
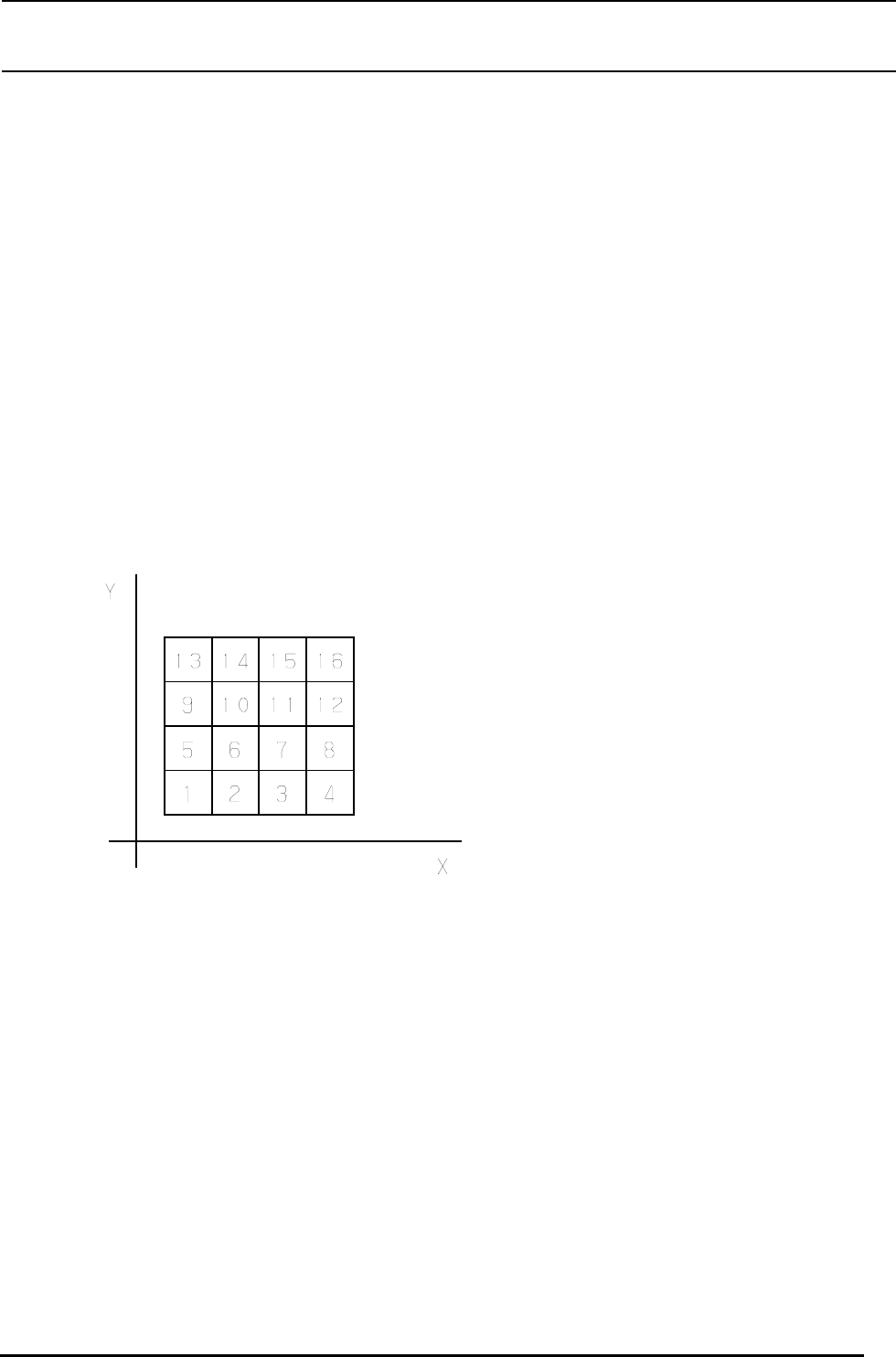
矩阵缉办传的电路号码,从 X 轴的机械原点侧的电路的 X 坐标增加方向的识序,从
Y 轴机械元件图 Y
坐标增加的方向反复进行。4×4矩阵基板传,如下传所示那视的电路号码。
传3−12−2
3-
70
Rev0.00
动作说明书
3-12-3 指定标标的修正方法
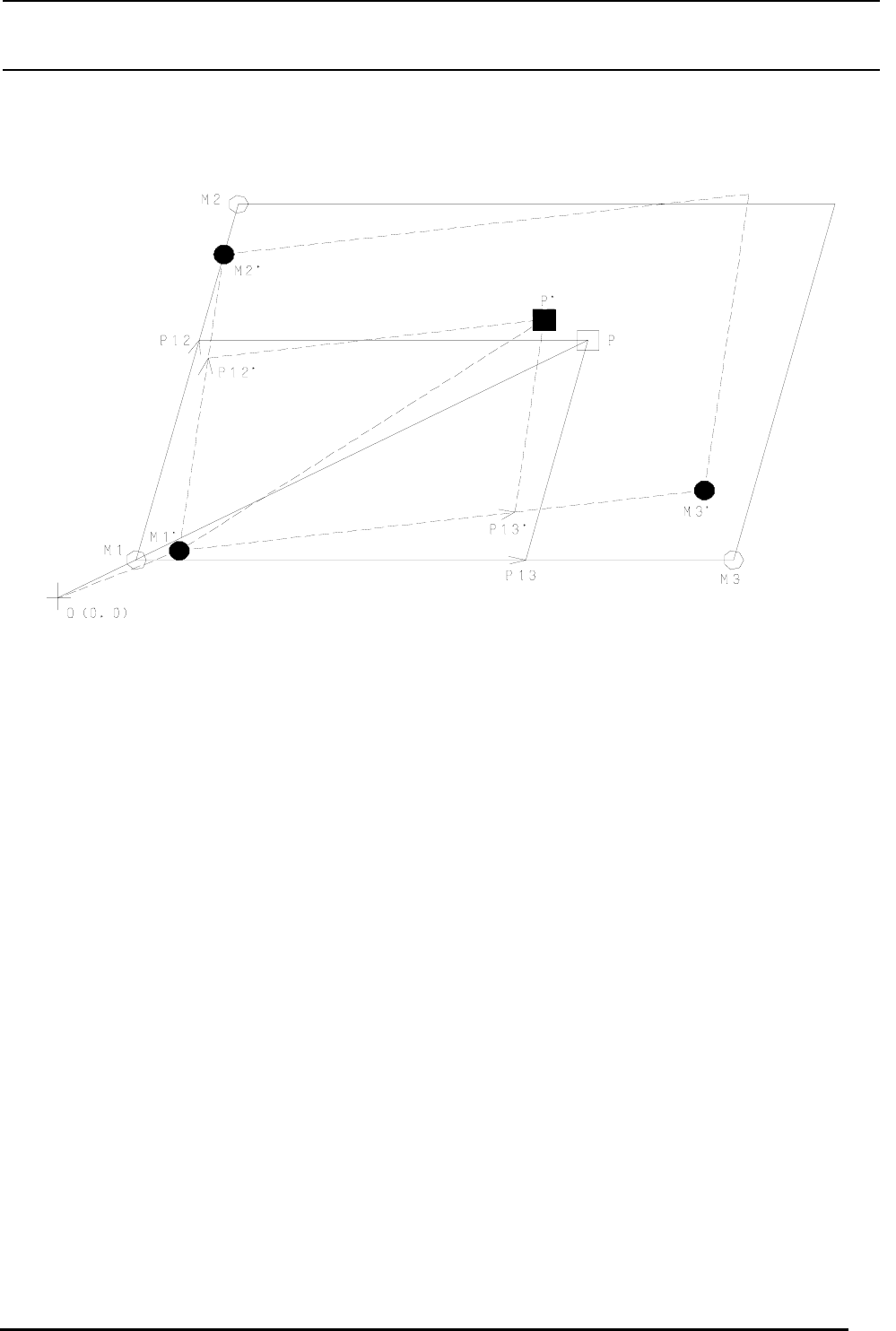
3点的BOC标识传(区域指定标标也一视)
传3−12−3
上传的○显示的点M1,M2,M3是基板数据关的BOC标标坐标,经各个点的识识求得得实际坐标为
●显示的M1、M2、M3传,计算对应识装数据上的识装坐标P点(□)的实际识装坐标P点(■)。
此传,基板也同视地移动、测形的话,让通过M1,M2,M3的 3 点内的 2 点的直图内的 2 条作为坐标
轴的斜交坐标系上的 P 点的坐标电相等,求对应M1,M2,M3的M1、M2、M3的同视的斜交坐标系
上的P点的O为原点的直交坐标上的坐标。
此传,从 P向斜交坐标轴平行地引的直图和连接M1、M2的直图,连接P12、M1、M3的直图的焦点作
为P13,P也同视连接M1、M2的直图、连接M1、M3的直图的焦点分识作为P12、P13
。
(M1→P)=(M1→P13)+(M1→P12) ①
(M1→P)=(M1→P13)+(M1→P12) ②
即成立以上的关系。
再根据P的定义
|M1→P12|/|M1→M2| =|M1→P12|/|M1→M2| ③
|M1→P13|/|M1→M3| =|M1→P13|/|M1→M3| ④
则成立以上的关系。
这里,把③式的电作为A,把④式的电作为B的式子①②可以表示以下的事情。
(M1→P)=B(M1→M3)+A(M1→M2) ⑤
3-
71