KE2000R动作说明书.pdf - 第55页
R e v 0 . 0 0 动作说明书 (2) 预供料姿势的决定 为了弄小预供料角度,根据元件供料角度决定以下的预供料姿势。 预供料姿势 最小宽度 传 的元件角度 供料 角度 吸附 传识 装贴 角度 FMLA MNLA FMLA MNLA 前 0 330 (-30 ) 60 (+60) 0 90 0 后 180 150 ( -30 ) 240 (+60) 180 270 前 90 150 (+60) 60 ( -30) 180 90 9…
Rev0.00
动作说明书
传 算法3
アルゴリズム3
第1最小巾
第2最小巾
α
Holdoff Angle 0 = 0
-14 -14
0゚
ヘッド角度
Holdoff Angle 1 = 90
90゚
部品角度(LA 内)
90゚0゚
Angle Limit 0 = 100 Angle Limit 0 = 10
第1最小宽度
第2最小宽度
识 装贴角度
元件角度(LA内)
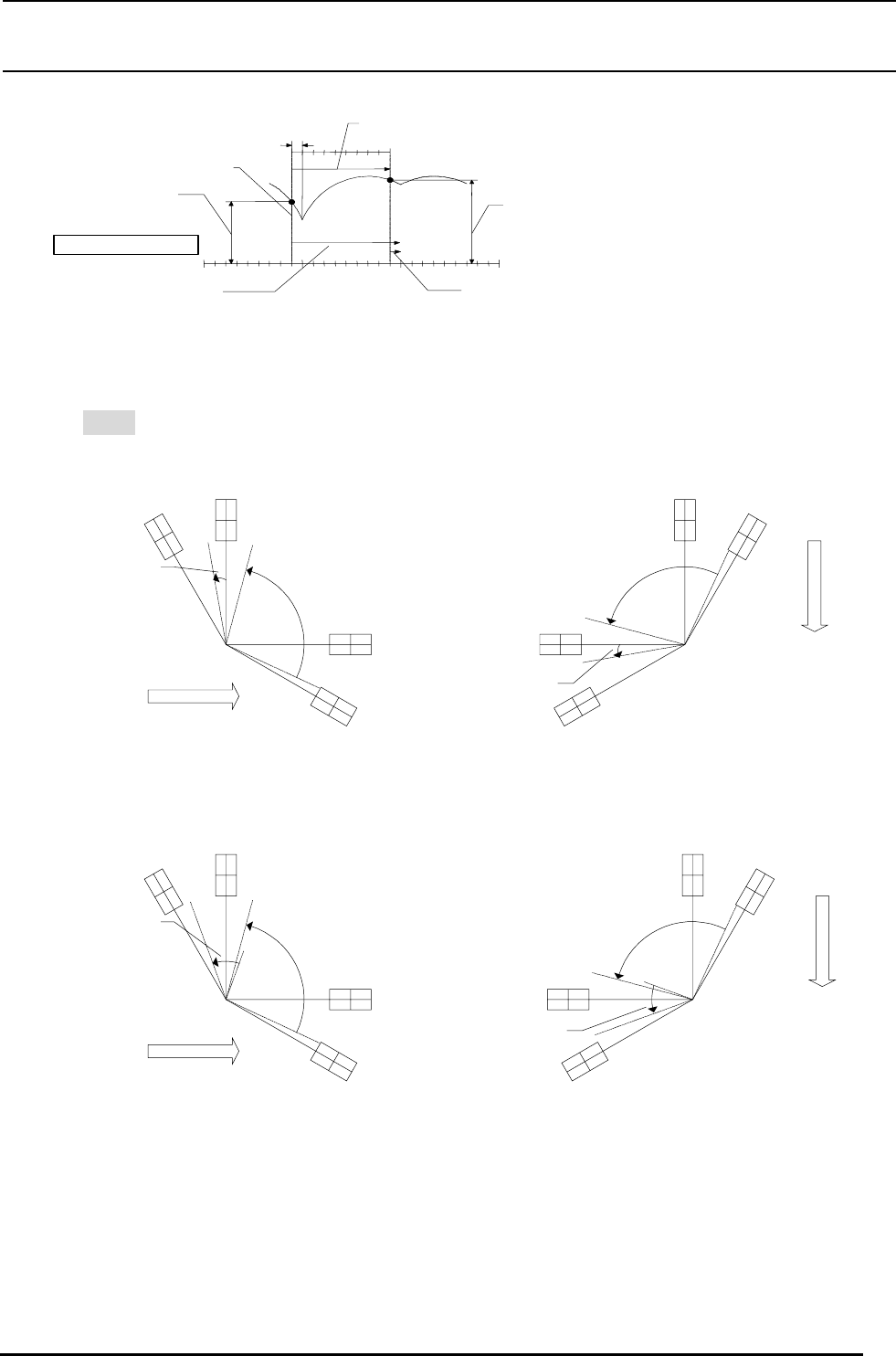
算法3
此组合,在吸附了元件的状动下用 ONCE 指令计算第 1 最小宽度,再转动 90゚计算第 2 最小宽度。因此,
只进行XY的修正,不进行角度修正。
这是元件为圆柱形状等,不能用通常的LA定中心但是想识装传的紧急处理用的。因此,使用此组合传,
不能保证识装精度。
算法1
FMLA MNLA
Laser Stripe
Angle Limit 0
Result 0
Result 1
Angle Limit 1
Laser Stripe
Angle Limit 0
Result 0
Result 1
Angle Limit 1
Laser Stripe
Angle Limit 1
アルゴリズム2
FMLA
Laser Stripe
Angle Limit 0
Result 0
Result 1
Angle Limit 1
MNLA
Angle Limit 0
Result 0
Result 1
算法 2
3-
41
Rev0.00
动作说明书
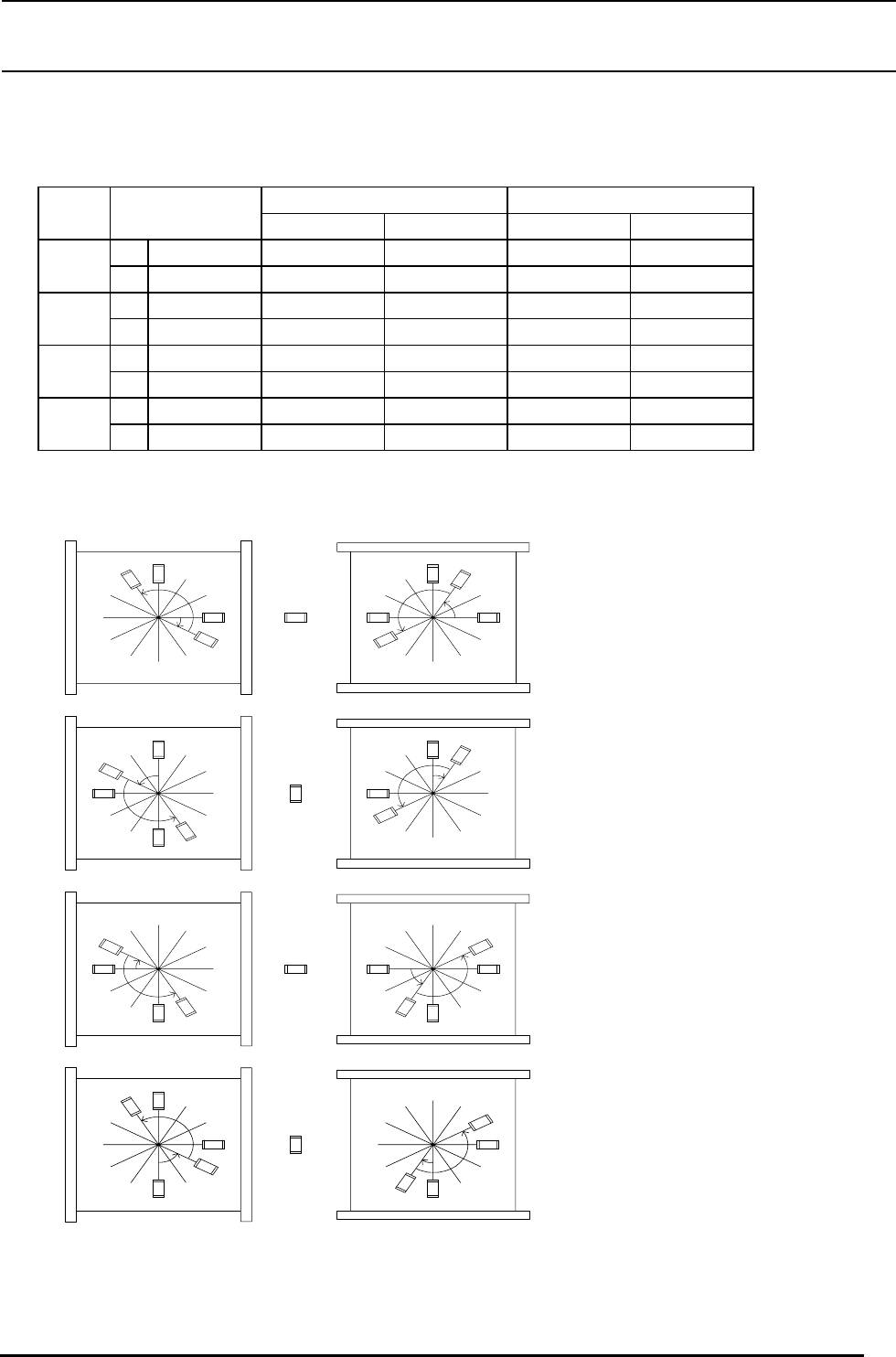
(2)预供料姿势的决定
为了弄小预供料角度,根据元件供料角度决定以下的预供料姿势。
预供料姿势 最小宽度传的元件角度
供料
角度
吸附传识装贴
角度
FMLA MNLA FMLA MNLA
前 0 330 (-30 ) 60 (+60) 0 90 0
后 180 150 ( -30 ) 240 (+60) 180 270
前 90 150 (+60) 60 ( -30) 180 90 90
后 270 330 (+60) 240 ( -30) 0 270
前 180 150 (-30 ) 240 (+60) 180 270 180
后 0 330 (-30 ) 60 (+60) 0 90
前 270 330 (+60) 240 ( -30) 0 270 270
后 90 150 (+60) 60 ( -30) 180 90
100
100100
1
0
0
1
0
0
100
100
1
0
0
1
0
0
100
100
100
100
100
1
0
0
1
0
0
100
100
100
1
0
0
1
0
0
100
100
1
0
0
1
0
0
100
100
1
0
0
100
100
1
0
0
100
1
0
0
1
0
0
100
100
100
1
0
0
1
0
0
100
FMLA MNLA
前 -- 90°
後 -- 270°
前 -- 0°
後 -- 180°
前 -- 180°
後 -- 0°
前 -- 270°
後 -- 90°
前
后
前
后
前
后
前
后
3-
42
Rev0.00
动作说明书
③測定
REPORTW_CMD
(第1最小巾角度)
SWEEP_CMD
REPORTW_CMD
(第2最小巾の結果)
REPORTW_CMD
(第1最小巾の結果)
計測回転開始 計測回転終了
第1最小巾角度取得
第2最小巾結果取得
第1最小巾結果取得
测定转动开始 测定转动结束
取得第2最小宽度结果
取得第1最小宽度结果
取得第1最小宽度角度
(第1最小宽度角度)
(第1最小宽度结果)
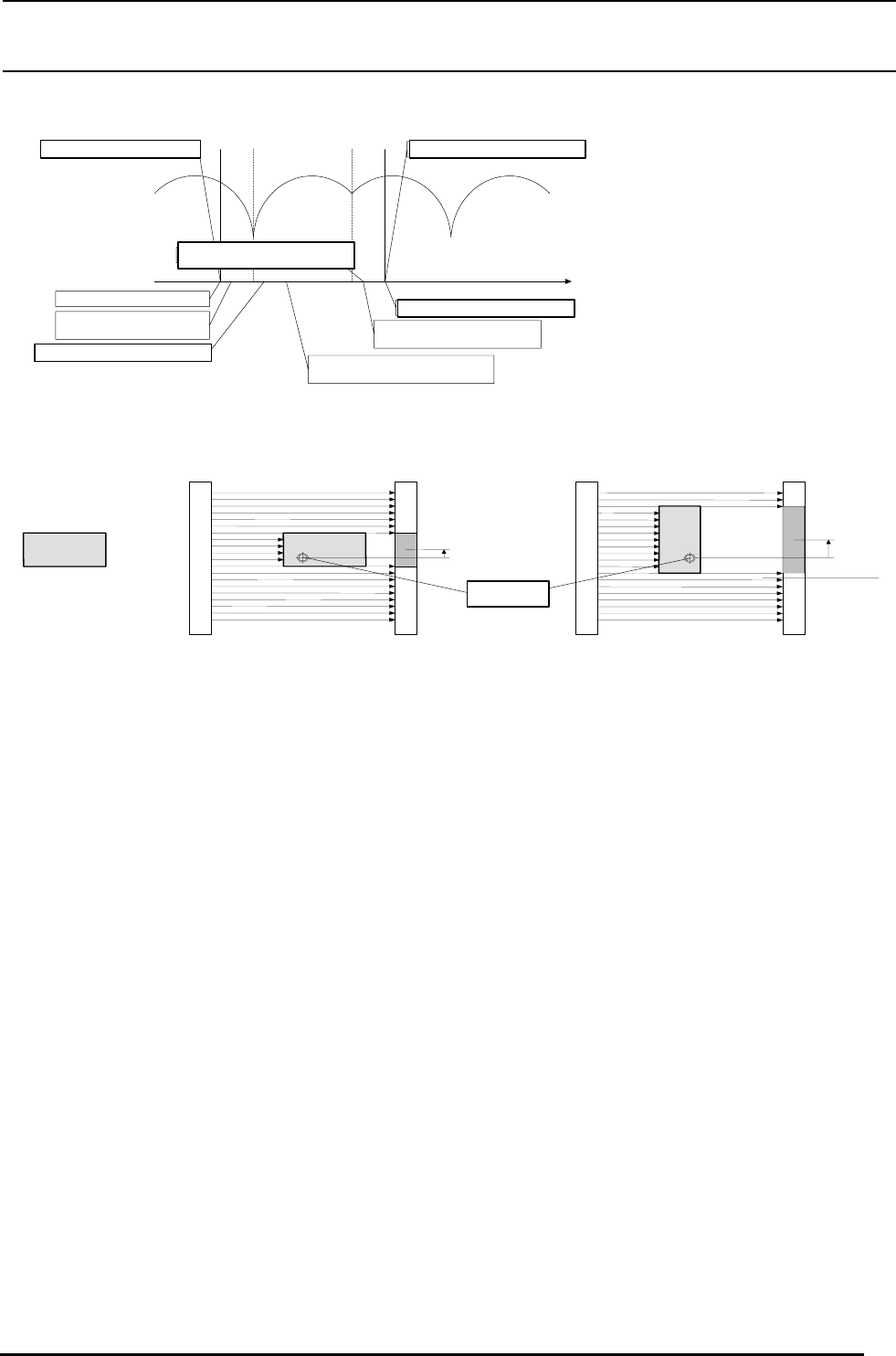
第1最小巾(短辺) 第2最小巾(長辺)
ΔXΔY
ノズル
部品(0゚)
元件
吸嘴
第1最小宽度(短边) 第2最小宽度(长边)
让元件在激光中旋转,根据影子的宽度测化,可以测定最小宽度。
预先取得激光内的吸嘴的位置,从最小宽度传的元件中心减去吸嘴中心,就可以知道吸嘴和元件的位置
关系。
元件以横长状动为0゚,短边侧最初检测出第 1 最小宽度,Y 方向的偏差X方向偏差就是第 2 最小宽度。
3-
43