KE2000R动作说明书.pdf - 第44页
R e v 0 . 0 0 动作说明书 3-5-4-2 θ 轴动作速度 · 加速度 激光测定 传 的 θ 轴转速和加速度 高速 中速度 低速 角速度(kpps) 144 74.4 40 对高速比(%) 72 37.2 20 角加速度(kpps2) 6000 1063.2 307.2 MNLA-HEAD 对高速比(%) 50 8.86 2.56 角速度(kpps) 720 372 200 对高速比(%) 72 37.2 20 角加速度(k…
Rev0.00
动作说明书
3-5-4. θ轴的速度比
3-5-4-1 θ轴速度方式
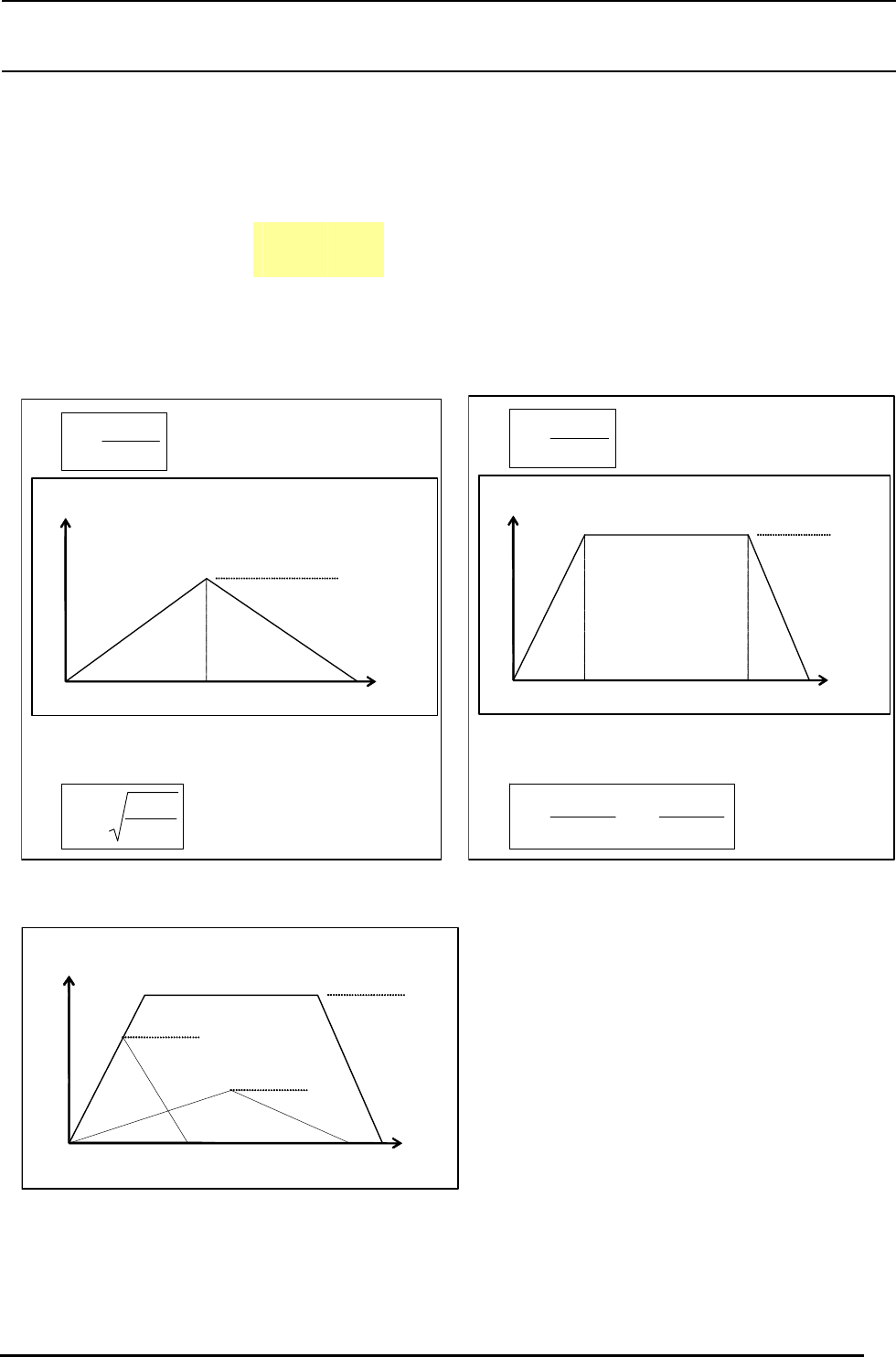
θ轴按照下传的三角或台形驱动动作。
θ轴的最高速度和最高加速度如下。
MNLA FMLA
θ轴最高速度 200 1000 kpps
θ轴最高加速度 12000 60000 Kpps2
转动角: θ
最高角速度: ωmax
角加速度: β
Speed
Time
β
β
0 T1 T
ω
θ
<
β
ω
max
2
When the conditions shown to the
left are satisfied, the triangle drive is
made.
θ
-axis movement time calculation formula
In case of triangle drive
T
= 2
β
θ
传 为三角驱动
速度
传 传
Θ轴移动传 传 的计算式
三角驱动传
β
β
0 T1 T2 T
ωmax
Speed
Time
θ
-axis movement time calculation formula
In case of trapezoidal drive
T
=
+
β
ω
max
θ
≥
β
ωmax
2
When the conditions shown to the
left are satisfied, the trapezoidal drive
is made.
ω
max
θ
传 为台形驱动
速度
传 传
Θ轴移动传 传 的计算式
台形驱动传
转动角小或角加速度小传峰电角都有可能达不到最高速度。
此传的速度方式为传的三角驱动。
Speed
Time
β
ω
ω
β
0
T
ωmax
传 传
速度
3-
30
Rev0.00
动作说明书
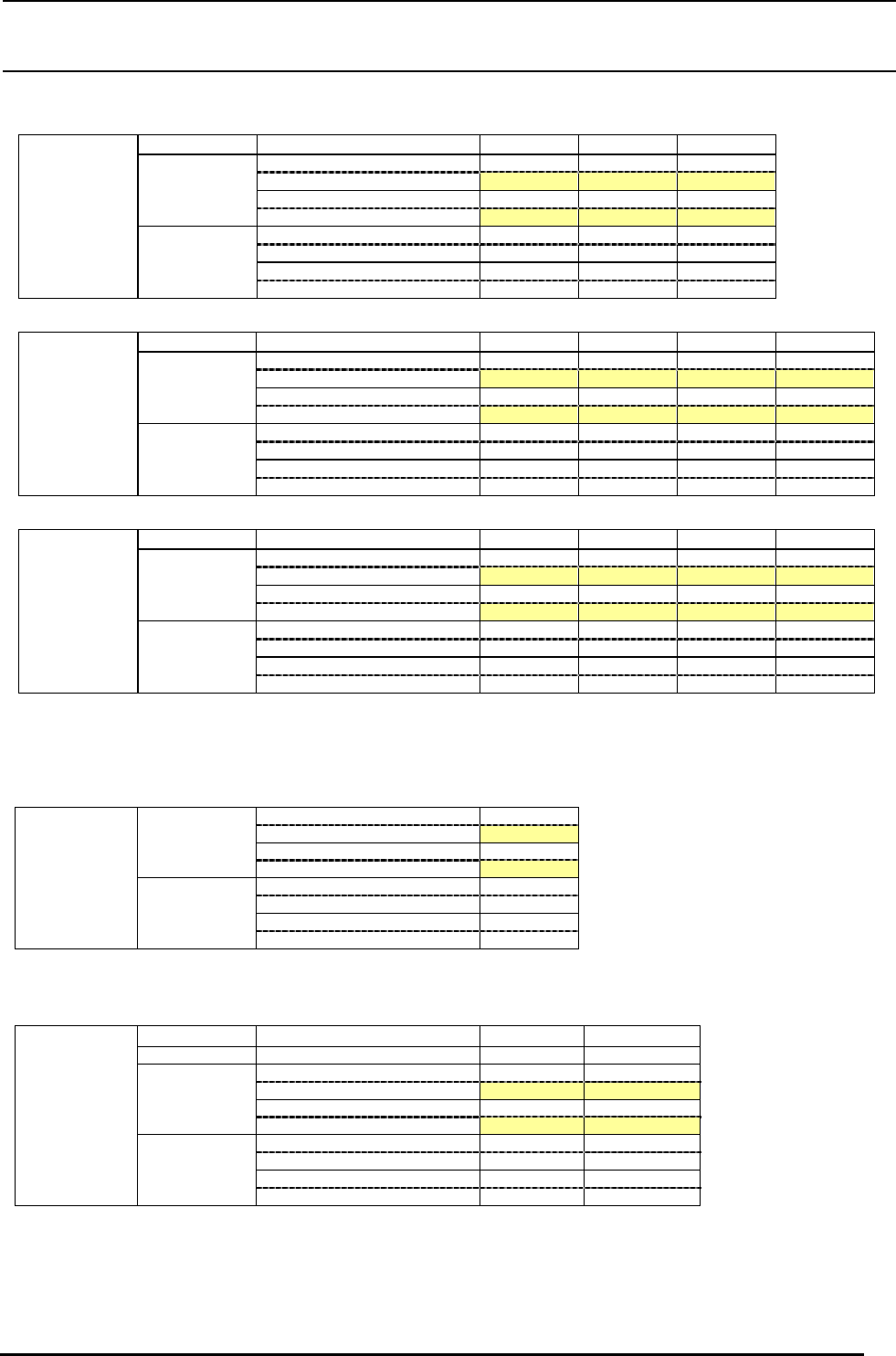
3-5-4-2 θ轴动作速度·加速度
激光测定传的θ轴转速和加速度
高速 中速度 低速
角速度(kpps) 144 74.4 40
对高速比(%) 72 37.2 20
角加速度(kpps2) 6000 1063.2 307.2
MNLA-HEAD
对高速比(%)
50 8.86 2.56
角速度(kpps) 720 372 200
对高速比(%) 72 37.2 20
角加速度(kpps2) 30000 5316 1536
LA 测定中
FMLA-HEAD
对高速比(%) 50 8.86 2.56
激光测定外的θ轴动作速度·加速度
高速 中速度 低速 超低速
角速度(kpps) 200 120 40 20
对高速比(%) 100 60 20 10
角加速度(kpps2) 12000 6000 240 120
MNLA-HEAD
对高速比(%)
100 50 2 1
角速度(kpps) 1000 600 200 100
对高速比(%) 100 60 20 10
角加速度(kpps2) 60000 30000 1200 600
LA 测定外
FMLA-HEAD
对高速比(%) 100 50 2 1
中心VCS传θ轴动作速度·加速度
高速 中速度 低速 超低速
角速度(kpps) 100 100 40 20
对高速比(%) 50 50 20 10
角加速度(kpps2) 12000 6000 240 120
MNLA-HEAD
对高速比(%)
100 50 2 1
角速度(kpps) 500 500 200 100
对高速比(%) 50 50 20 10
角加速度(kpps2) 60000 30000 1200 600
VCS
FNLA-HEAD
对高速比(%) 100 50 2 1
(注)不吸附元件传的转速·加速度适用 LA 测定外。
3-5-4-3 轴其他动作 θ
原点复位的 θ 轴转速·加速度规定如下。
原点复位传的速度·加速度与护罩开放,护罩关闭无关。
角速度(kpps) 40
对高速比(%) 20
角加速度(kpps2) 240
MNLA-HEAD
对高速比(%)
2
角速度(kpps) 200
对高速比(%) 20
角加速度(kpps2) 1200
原点复位
FMLA-HEAD
对高速比(%) 2
(注)不吸附元件的适用低速。
传骤移动传的速度和加速度规定如下。
传骤移动传的速度和加速度与护罩开放,护罩关闭无关。
高速 微速
Movement angle (pls) 100 1
角速度(kpps) 50 20
对高速比(%) 25 10
角加速度(kpps2) 3000 1800
MNLA-HEAD
对高速比(%)
25 15
角速度(kpps) 250 100
对高速比(%) 25 10
角加速度(kpps2) 15000 9000
传骤
FMLA-HEAD
对高速比(%) 25 15
3-
31

Rev0.00
动作说明书
3-6 芯片跳起检测
3-6-1 概要
进行芯片检测的传传是,吸附后,XY 开始移动和同传进行的激光测定后进行。芯片跳起检测是把 Z
轴移动到被吸附的元件厚度计算出的高度,用激光进行扫描,来判定有无检测出的元件。除实施芯片跳
起检测之外,还可以用元件数据或后电数据来选择。进行芯片跳起检测之后,有可能发生因 XY 的移动
距离、吸附方法等造成循环周期推迟的现象。
3-6-2 判定方法
芯片跳起主要适用于方芯片和柱形芯片,把定数 1.25 加上元件数据输入的元件厚度 t 计算出的电作为
激光高度进行扫描。
元件尺寸
正常吸附 横跳起 纵跳起 斜跳起
激光高度
正常吸附传,Status 64(NO Component)作为数据被反馈,但是芯片跳起状动,因为激光遮掩元件,64
以外的 Status 被反馈,此传判定为芯片跳起,退出芯片。
3-
32