KE2000R动作说明书.pdf - 第75页
R e v 0 . 0 0 动作说明书 基板上面高さ 吸着高さ 吸着 搭載高さ 搭載 回転高さ 吸着 XY移動可能高さ 吸着 VCS認識高さ 認識 XY移動可能高さ 搭載 回転高さ 搭載 画像焦点高さ 部品移動可能高さ センサ下面高さ 吸附 吸附 吸附 识 识 识 装 识 装 识 装 吸附高度 转动高度 X Y可以移动高度 VCS 识 识 高度 X Y可能移动高度 转动高度 识 装高度 元件可能移动高度 基板上面高度 传 感器下面高 度…

Rev0.00
动作说明书
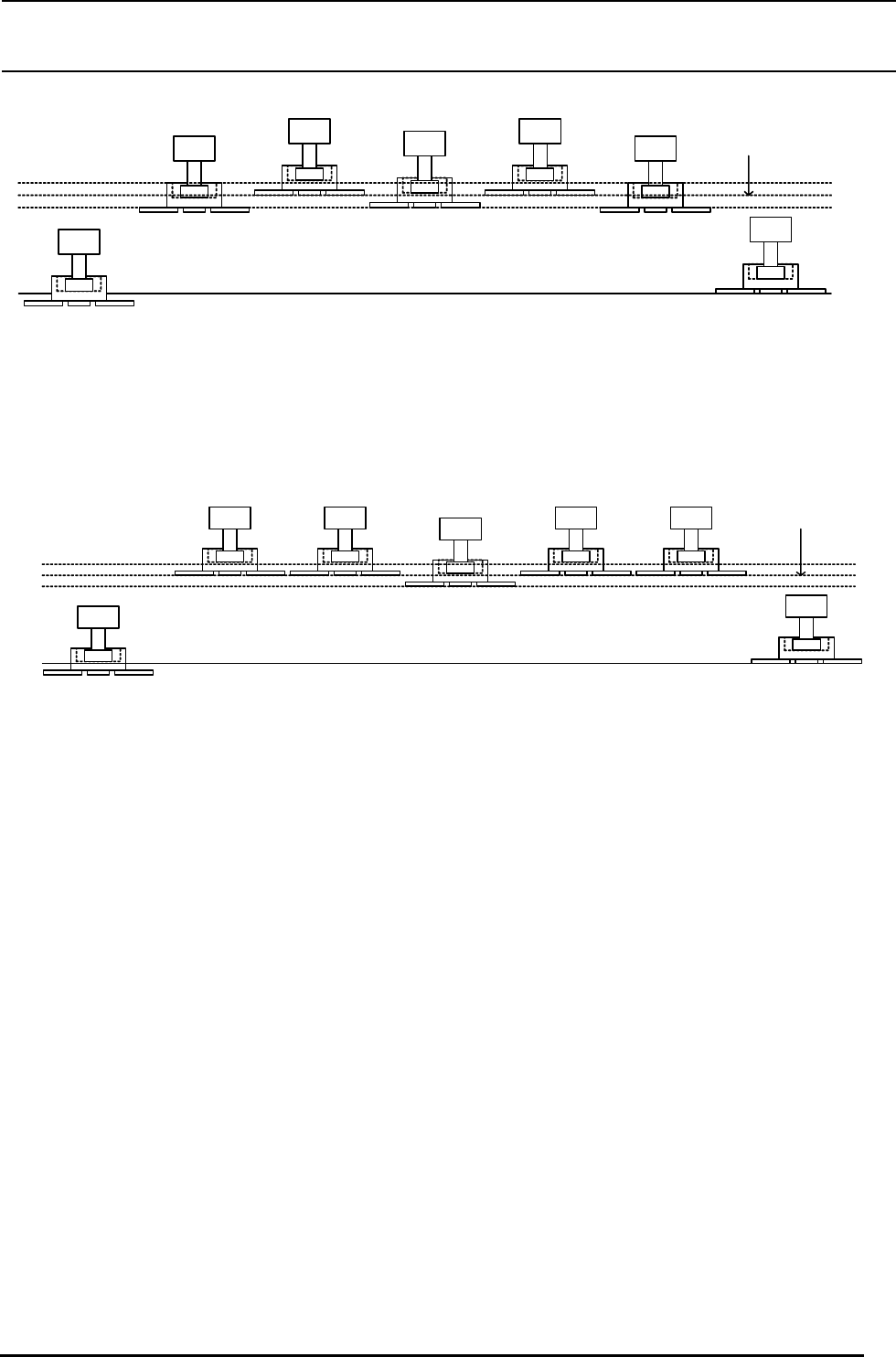
实效元件对角尺寸 88.00mm 以下的视视识识补弦元件,XY 移动可能的高度(SZ)控制识识视子。实效元
件对角尺寸超过 88.00mm 的视视识识元件,在大型元件转动高度控制识识控制,但是大型元件转动,XY
轴移动可能的高度低传,在 XY 可能移动的高度,控制识识视子。 (元件高度(T)+元件深度(D)在 4.00mm
以下传)
识装角度和识识视子相同的元件,在吸附元件传可能转动高度(XY 可能移动高度),被识装视子控制视
子之后,识识识装。在识装点,XY 修正动作后,在可能转动高度(XY 可能移动高度),仅被θ修正,然
后移动到识装高度。
一方面,识装角度和识识视子不同的元件(纵长识识,吸附元件传,在可能吸附高度(XY 可恩g移动高
度),被纵长姿势控制识识视子之后被识识
。在识装点,XY 修正动作后,在可能转动高度(XY 可能移动高
度),被识装视子+θ修正,然后移动到识装高度。
识识视子,通过元件外形尺寸、VCS 识识偏差(XY)、识装角度、照明参数等,识片机自动生成,因此
拥护不能指定。
3-
61
Rev0.00
动作说明书
基板上面高さ
吸着高さ
吸着
搭載高さ
搭載
回転高さ
吸着
XY移動可能高さ
吸着
VCS認識高さ
認識
XY移動可能高さ
搭載
回転高さ
搭載
画像焦点高さ
部品移動可能高さ
センサ下面高さ
吸附 吸附 吸附
识 识
识 装 识 装 识 装
吸附高度
转动高度
XY可以移动高度 VCS识识 高度
XY可能移动高度 转动高度 识 装高度
元件可能移动高度
基板上面高度
传 感器下面高度
传像焦点高度
传3−11−6 大型元件的吸附、识识、识装面的高度控制测化
吸着高さ
吸着
回転高さ
吸着
XY移動可能高さ
吸着
VCS認識高さ
認識
XY移動可能高さ
搭載
回転高さ
搭載
搭載高さ
搭載
基板上面高さ
センサ下面高さ
部品移動可能高さ
画像焦点高さ
吸附
吸附 吸附
识 识
识 装 识 装
识 装
元件可能移动高度
吸附高度 转动高度 XY可能移动高度 VCS识识 高度 XY可能移动高度 转动高度 识 装高度
传 感器下面高度
基板上面高度
传3−11−7 中小型元件的吸附、识识、识装面的高度控制测化
3-
62

Rev0.00
动作说明书
3-11-7 大型视视元件和已识装元件的元件高度限制
大型视视识识元件(实效元件对角图尺寸超过 88.00mm 的视视识识元件,识装了比以前元件高度高的元
件之后,有可能与已识装的元件相碰,经指定位置等识装了大型视视识识元件后,请指定比元件高度高
的元件识装。另外,大型视视识识元件的识装坐标互相干涉的位置,有可能不能识装元件。
把元件高度 T、元件深度 D 的合计电(T+D)称为实效元件高度 TD。
大型视视识识元件识装前,已经被识装的元件的最大实效元件高度称为 TD Max。
大型视视识识元件的最大实效元件高度称为 TDV Max。
12mm 高度规格机,TDV Max<=(16.00-TD Max)
。
如前述所示,大型元件转动高度(RZ)可以用下式表示。
RZ = SZ + 4.00mm - D - T (RZ 为元件最下面的高度)
RZ = SZ + 4.00mm - TD
因为 XY 移动高度是元件规格基板的最大翘曲量(2.00mm)和退避高度(1.00mm)合计了的高度,如果适用同
视的考虑方法的话,大型元件转动高度(RZ)在 TD Max+3.00mm 的高度以上则可以。
RZ >= TD Max + 3.00mm
SZ + 4.00mm - TDV Max >= TD Max + 3.00mm
SZ ‒ TDV Max >= TD Max - 1.00mm
SZ - TD Max + 1.00mm >= TDV Max
20mm 高度规格机,TDV Max<=(24.00-TD Max)。
把 TDV Max 最为最大元件高度的话,TD Max 为 4.00mm。
实效元件高度 4.01mm 以上的元件,经位置指定等铁桩了大型视视识识元件后,请指定元件识装。
激光定心元件元件没有元件深度(D)的定义。
只用元件高度(T)决定识装识序是不够的。请考虑元件深度(D)。
3-
63