KE2000R动作说明书.pdf - 第116页
R e v 0 . 0 0 动作说明书 ⑥LED 显示灯的意义如下。 VR8 CN8 LD1:未定 義 LD2:XY移動可能Z高さ確認用(点 灯で可能) LD3:ノズル1減速センサ確認用(点 灯で検知) LD4:ノズル2減速センサ確認用(点 灯で検知) LD5:ノズル3減速センサ確認用(点 灯で検知) LD6:ノズル4減速センサ確認用(点 灯で検知) LD7:ノズル5減速センサ確認用(点 灯で検知) 未定 义 确 认 用 XY 可以移 …
Rev0.00
动作说明书
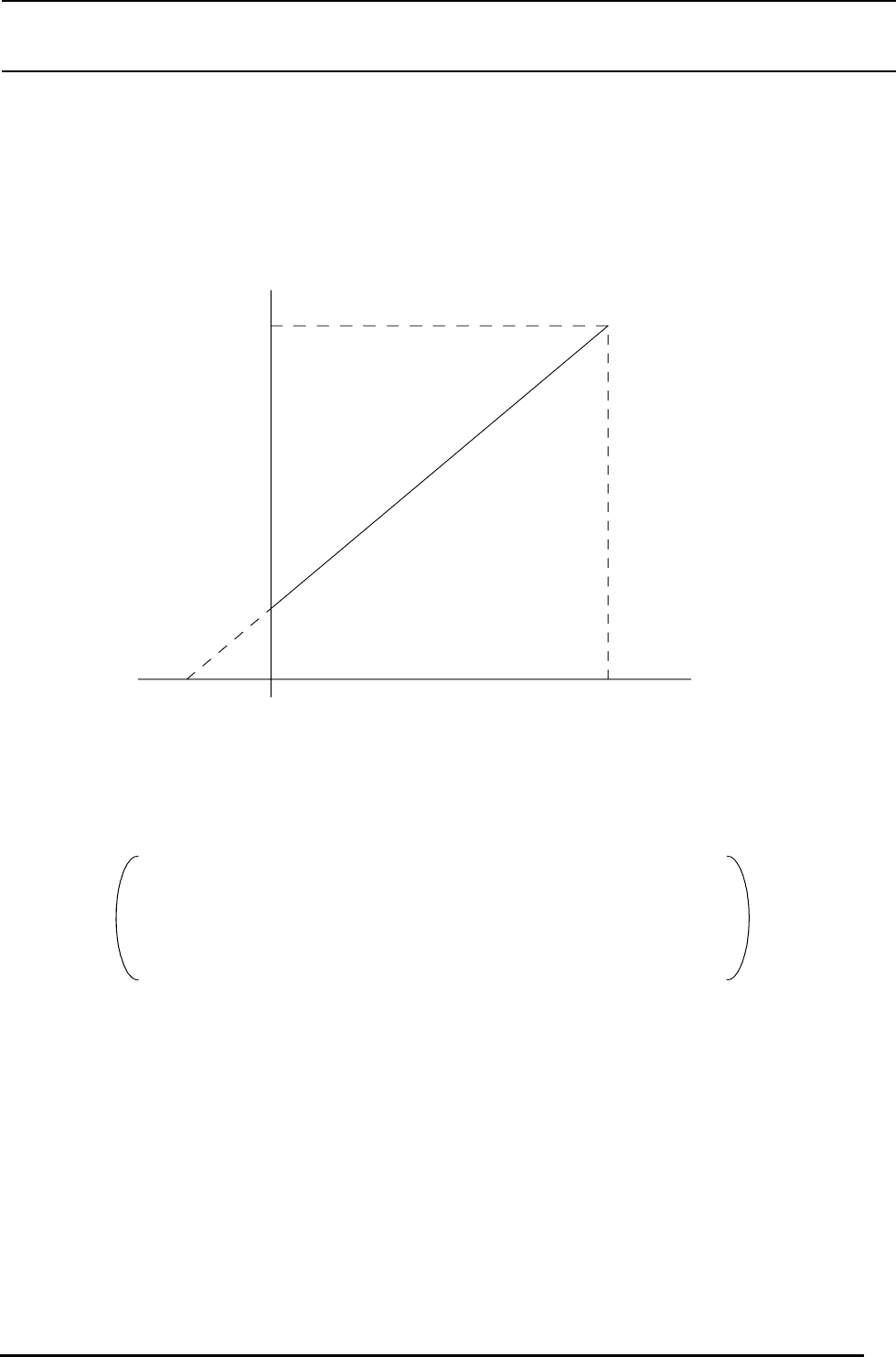
⑤真空电的换算
A/D测换的电换算成真空电的方法如下。
5V
1V
0
190
−760レベル
* A/Dの読込み値Dpに対する、バキューム値Pの算出方法
P=−((Dp−51)×760/204 )[レベル]
0∼5V −−−→ 0∼255(FFh)
1∼5V −−−→ 52∼255=204
0∼−760レベル −−−→ 52∼255
最小分解能=760/204≒3.725[レベル]
等 级
等 级
等 级
最小分辨率
等 级
对
A/ D
读 取 电
Dp
计 算真空电
P
的 计 算方法
5-
18
Rev0.00
动作说明书
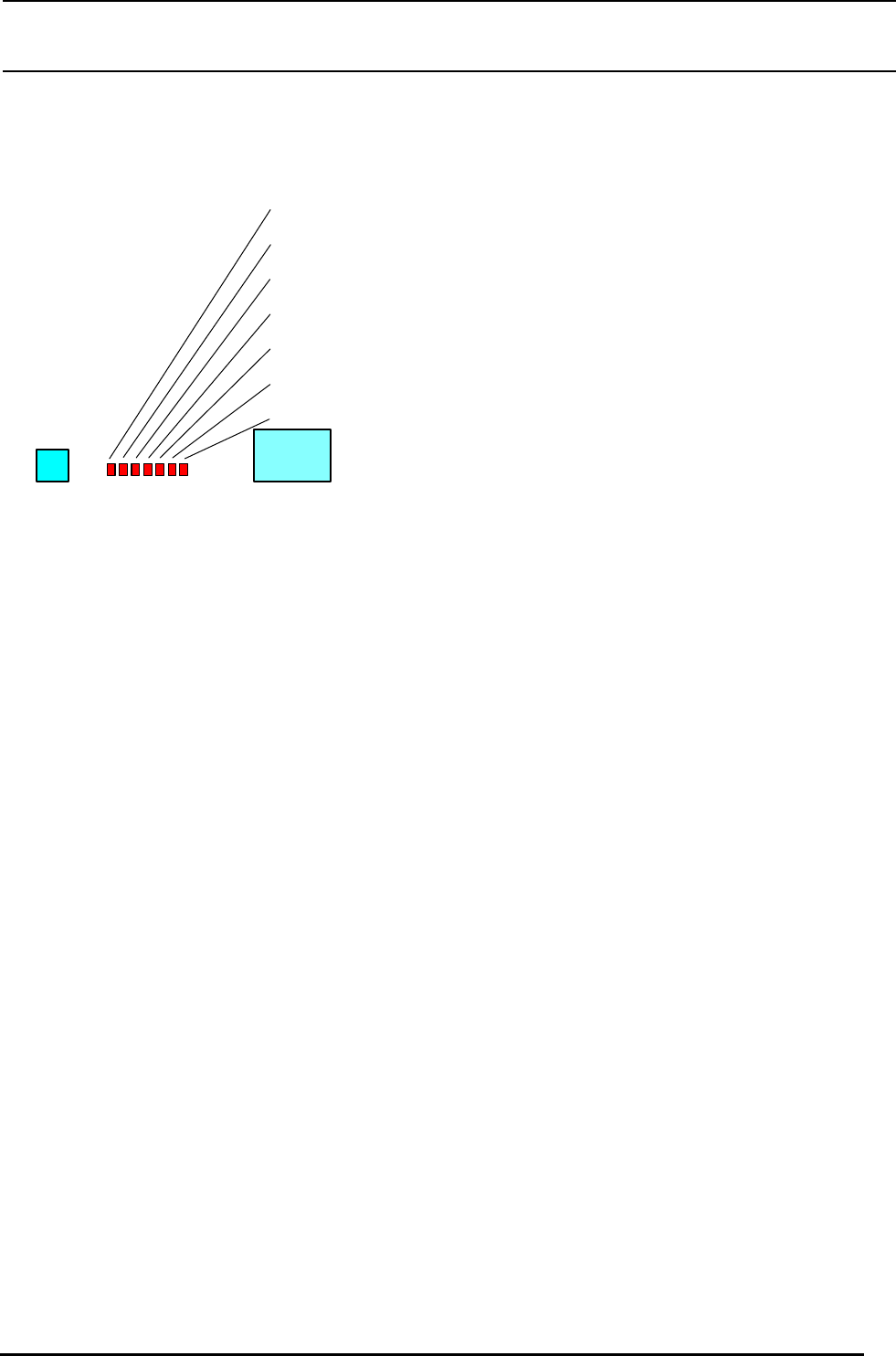
⑥LED显示灯的意义如下。
VR8
CN8
LD1:未定義
LD2:XY移動可能Z高さ確認用(点灯で可能)
LD3:ノズル1減速センサ確認用(点灯で検知)
LD4:ノズル2減速センサ確認用(点灯で検知)
LD5:ノズル3減速センサ確認用(点灯で検知)
LD6:ノズル4減速センサ確認用(点灯で検知)
LD7:ノズル5減速センサ確認用(点灯で検知)
未定义
确 认 用
XY可以移动 Z高度( 亮灯可能)
确 认 用吸嘴1减 速 传 感器( 亮灯检测)
确 认 用吸嘴2减 速 传 感器( 亮灯检测)
确 认 用吸嘴3减 速 传 感器( 亮灯检测)
确 认 用吸嘴4减 速 传 感器( 亮灯检测)
确 认 用吸嘴5减 速 传 感器( 亮灯检测)
5-
19

Rev0.00
动作说明书
5-1-9 操作基板(40001952)
(1)包括背面安装的操作SW基板的各开关
(起动、停止等)的状动读取(R)和LED(ORIGIN,
伺服)的亮灯和灭灯(W)。
(2)向SAFETY基板通知护罩开放开关状动、伺服开关的状动、紧急开关等状动
(3)进行HOD信号中转。
5-
20