KE2000R动作说明书.pdf - 第61页
R e v 0 . 0 0 动作说明书 3-10 供料器的驱动 同 传 曲图传 标准的供料 传 送 ( 仅 传 送 ) 上升 A : b yOnTime Z B : b y O f f T i m e 下降 C : b yPickhoid 供料器 传 送用扳手 A B A B 需要保持吸附 视 子 传 Z 下降 剥离等待 传 传 C 真空检查 供料器 传 送用扳手 A B A B 需要推顶元件 传 (44 mm) Z 下降 推顶扳手 A…
Rev0.00
动作说明书
代码
10
进
16
进
名称 说明
99 63H OVERRUN 前面的处理(REPORTW_CMD による)在开始寻找下一最小宽度(闭锁
角度被指定)之前没有进行完了。
100 64H UNITS_NOT_SET 对初期化需要的信息要求,不能事先进行初期化。
・? REPORTW_CMD 需要设定单位(μm)。
102 66H INVALID_ALG 测定指定的测定方法无效。
※ 发生此异常传,主机侧(识片)的问题。
103 67H LOW_BACKGRAU
ND
传像检查中的激光辉度过低。因此,不能实行传像处理(数电不能
计算。)
104 68H BAD_IMAGE_REGI
ON
传像检查领域边界不能正确设定。
105 69H IMG_CHK_FAIL 传像检查的参数比较或传像电比较失败。
106 6A
H
ERROR_LEVEL_
TOO_LOW
现在指定的异常登标不能定义而发生异常。
为了将实际工作代码有效,需要测更异常等级。
※ 现在 MCM 的版本反馈的异常等级仅为 0。
3-
47
Rev0.00
动作说明书
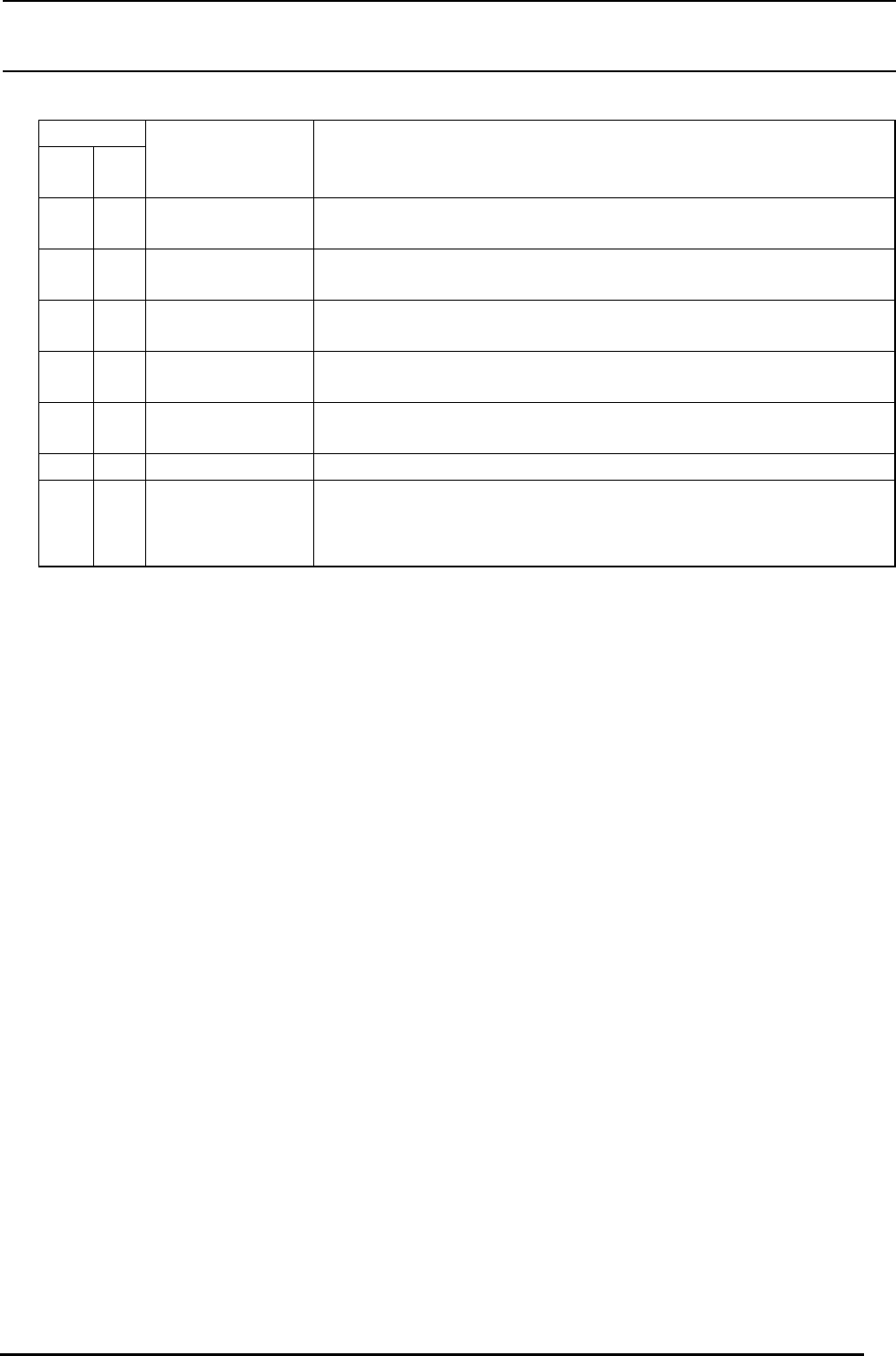
3-10 供料器的驱动
同传曲图传
标准的供料传送(仅传送)
上升 A : byOnTime
Z B : byOffTime
下降 C : byPickhoid
供料器传送用扳手
A B A B
需要保持吸附视子传
Z下降
剥离等待传传 C
真空检查
供料器传送用扳手
A B A B
需要推顶元件传(44 mm)
Z下降
推顶扳手
A B
供料器传送推顶
A B A B
3-
48
Rev0.00
动作说明书
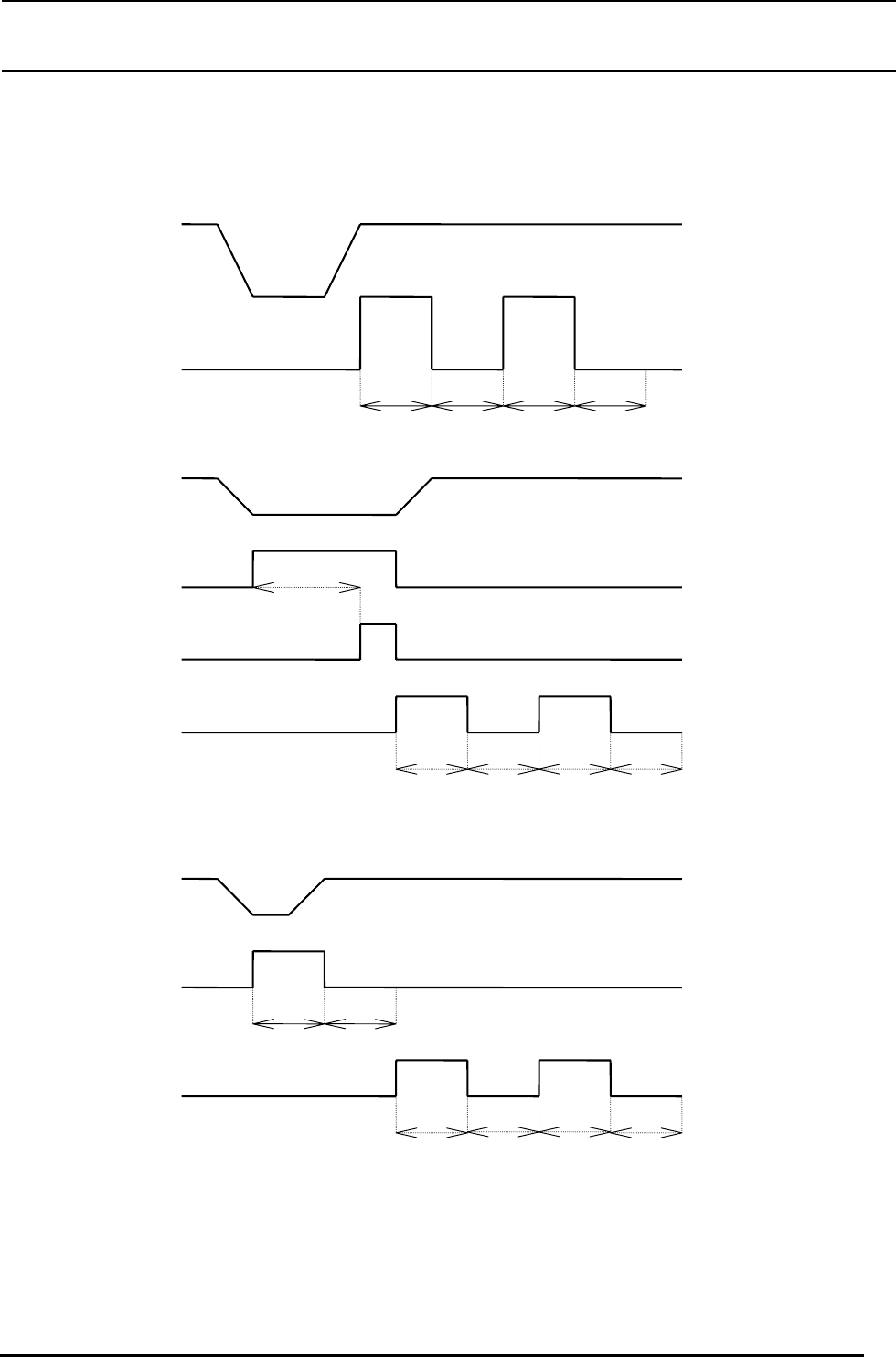
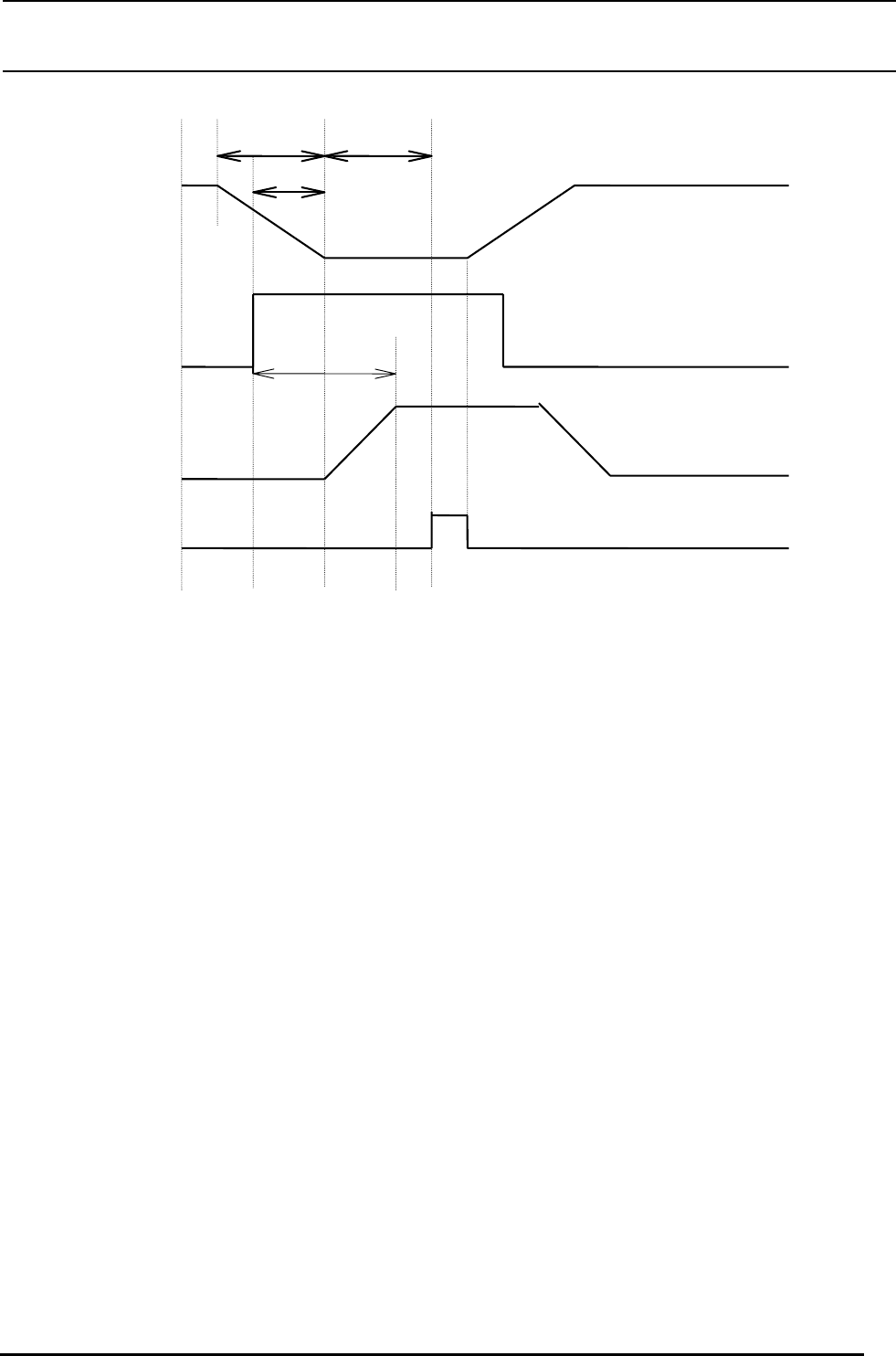
32mm纸粘合式带式供料器
40 80 (待机传传)
5∼10
UP
Z轴
DOWN
ON
吸嘴检测传感器
OFF 74
压出
气缸
拉进
↑ ↑
真空检测 ① ②
单位: msec
① 带剥离动作传传
② 元件传送动作传传
3-
49