00196508-02_UM_X-Serie_SR705_PT.pdf - 第130页
Dados técnicos da máquina automática Manual do usuário SIPLACE Série X Cabeça de montar A partir da versão de software SR.70x.xx Edição 01/2011 130 tegrada. No caso de componente s grandes até 50 x 40 mm², a cabe ça de m…
Manual do usuário SIPLACE Série X Dados técnicos da máquina automática
A partir da versão de software SR.70x.xx Edição 01/2011 Cabeça de montar
129
3
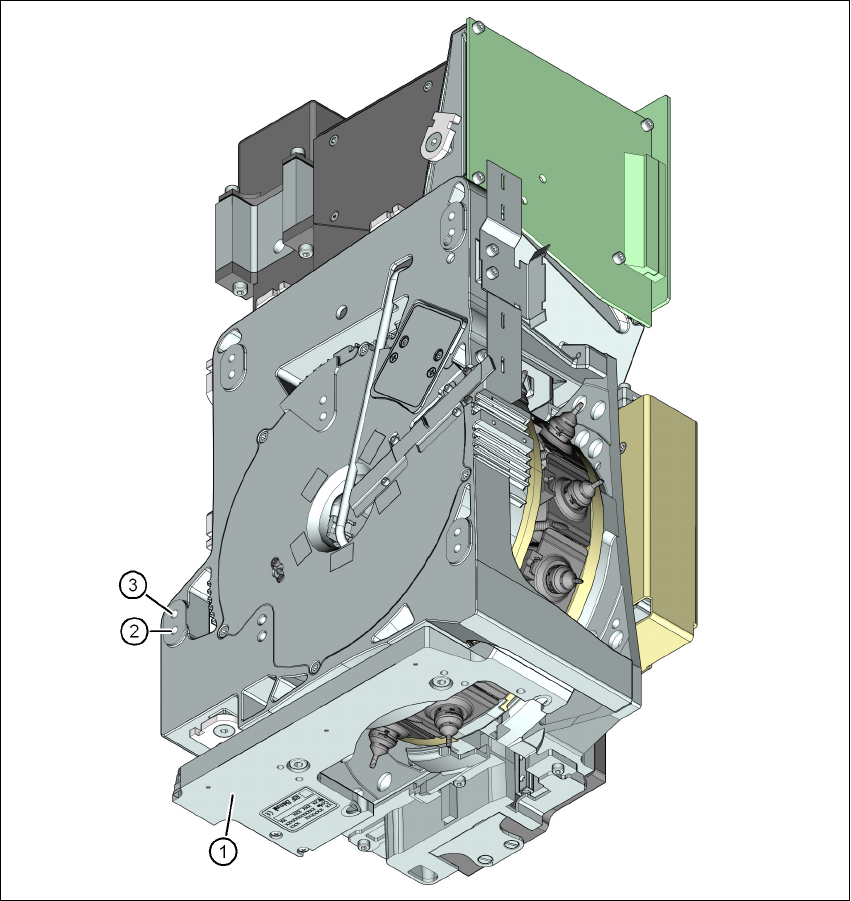
Fig. 3.5 - 5 SIPLACE MultiStar - Vista posterior, grupos funcionais parte 3
(1) Sensor de componentes
(2) Posição de montagem para componentes com uma altura de até 11,5 mm
(3) Posição de montagem para componentes com uma altura de até 6 mm
3.5.2.1 Descrição
A MultiStar combina duas características opostas como a grande capacidade de montagem e
grande flexibilidade. No caso de componentes pequenos até 27 x 27 mm², a MultiStar funciona
de acordo com o procedimento Collect&Place, ou seja, com uma grande capacidade de monta-
gem. Para isso, os componentes são centrados opticamente com a câmara de componentes in-
Dados técnicos da máquina automática Manual do usuário SIPLACE Série X
Cabeça de montar A partir da versão de software SR.70x.xx Edição 01/2011
130
tegrada. No caso de componentes grandes até 50 x 40 mm², a cabeça de montar funciona
segundo o princípio Pick&Place, em que os componentes são centrados opticamente com a câ-
mara estacionária.
A combinação de ambos os procedimentos de montagem C&P e P&P dei o seu nome à MultiStar.
Esta é abreviada como cabeça CPP.
Os 12 segmentos da cabeça CPP encontram-se dispostos em forma de estrela. Um torque motor
com um torque elevado roda a estrela em torno do eixo horizontal, o eixo da estrela.
Cada segmento possui um acionamento DP próprio para rodar o bocal. Por isso, os bocais já não
são rodados para a posição correta numa única estação da cabeça. Podem ser rodadas para a
sua posição de montagem em qualquer momento e independentemente umas das outras.
Cada segmento possui o seu próprio gerador de vácuo. Os tempos de comutação entre vácuo e
sopro de ar podem assim ser muito reduzidos. Além disso, no circuito de retenção é possível fa-
zer um teste de vácuo para cada bocal individual.
O acionamento Z dos segmentos é realizado por um motor linear com sistema de medição da
distância linear e, portanto, com alta precisão. Na posição de recolha/montagem, o acionamento
de Z desloca os segmentos na direção vertical para baixo ou para cima.
Como em todas as cabeças Collect&Place SIPLACE, a câmara de componentes digital encontra-
se integrada na cabeça de montar. A remoção de trajetos de deslocação adicionais para a cen-
tragem ótica dos componentes contribui para uma maior velocidade de processamento.
O sensor de componentes na parte inferior da cabeça de montagem mede os componentes na
posição de recolha e de montagem. Para cada movimento do eixo Z são efetuadas medições na
ponta dos bocais e é dada a informação sobre se um componente está ou não junto ao bocal e
sobre qual a altura do componente.
3.5.2.2 Posições de montagem da SIPLACE MultiStar
A cabeça CPP pode ser montada no suporte da cabeça em duas posições diferentes:
– MultiStar na posição de montagem superior
Nesta posição é possível processar componentes até um tamanho de 50 x 40 mm² e uma
altura de até 11,5 mm. 3
– MultiStar na posição de montagem inferior
Nesta posição, a cabeça CPP monta componentes com uma dimensão de 27 x 27 mm² e
componentes com uma altura de 6 mm, de acordo com o processo Collect&Place. 3
Quando determinar a posição de montagem tenha em conta as regras seguintes:
→ A altura das cabeças numa zona de montagem deve ser igual para todas as cabeças de
montagem.
→ Instale a cabeça CPP sempre na posição de montagem superior se este for combinada com
os módulos seguintes:
– Câmara de componentes estacionária
Manual do usuário SIPLACE Série X Dados técnicos da máquina automática
A partir da versão de software SR.70x.xx Edição 01/2011 Cabeça de montar
131
– Trocador de bandejas matricial
– TwinStar
3.5.2.3 Classificação da gama de componentes a processar
3
3.5.2.4 Modos de montagem da MultiStar
De acordo com a classe de componentes, a cabeça CPP funciona com diferentes modos de mon-
tagem. A otimização da preparação selecione para tal o modo de montagem com as menores
durações de impulso. A tabela seguinte mostra a relação entre a classe de componentes e o
modo de montagem.
Tab. 3.5 - 2 Relação entre a classe de componentes e os modos de montagem
3
Classe CO Dimensão CO Posição de
montagem
a
da
cabeça CPP
Altura do
componente
Tipo de câmara de
componentes
Componente
pequeno
K_BE
01005
b
-
27 x 27 mm²
superior até 8,5 mm
Câmara de cabeça,
tipo 30
inferior até 6 mm
01005
b
-
16 x 16 mm²
inferior até 6 mm
Câmara de cabeça,
tipo 38
Componente
médio/grade, tipo
M_BE_1
< 27 x 27 mm²
superior
entre 8,5 e
11,5 mm
Câmara de compo-
nentes estacionária,
tipo 33
(ver seção 6.7.1
, pá-
gina 406)
inferior não possível
Componente
médio/grade, tipo
M_BE_2
entre 27 x 27 mm²
e 32 x 32 mm²
superior 11,5 mm
inferior não possível
Componente
grande
G_BE
entre 32 x 32 mm²
e 50 x 40 mm²
superior até 11,5 mm Câmara de compo-
nentes estacionária,
tipo 33
inferior não possível
Tab. 3.5 - 1 Classificação da gama de componentes a processar
a) Tenha por favor em conta as regras relativas à altura das posições de montagem na Seção 3.5.2.2, página
130
.
b) CO 01005: tipo de câmara 30; tipo de câmara 38 recomendada para requisitos elevados a nível de quali-
dade.
Modo de montagem Classe de componentes
Componente
pequeno
Componente médio/grande Componente grande
Modo Collect&Place Sim Não Não
Modo misturado Sim Sim Não
Modo Pick&Place avan-
çado
Sim Sim Sim
Modo
Pick&Place puro
Não Não Sim