1OM-1075-002.pdf - 第78页
2.4.7 Component Recognition Section Fig. 1A32 The machine is provided with a mechanism that inspects (recognizes) the components picked up by vacuum nozzles, using three component recognition cameras and three light sour…
Do not touch the placement heads by hand because
a strong motor is used to move them at high speed.
Otherwise, you may be trapped in the moving
mechanism, causing a major injury.
• Keep the diffusion plates of the vacuum nozzles
clear of oil, nicks, etc. Otherwise, an error may oc-
cur during component recognition.
• Do not bring a magnet close to any vacuum nozzle.
Otherwise, an error may occur during
component picks and placement.
• Do not touch the L-axis U/D detection fitting by hand.
Otherwise, the fitting will be deformed, making it
impossible to be zeroed.
0308-002 1-31
AHB01EOPP
2.4 Main Units
WARNING
CAUTION
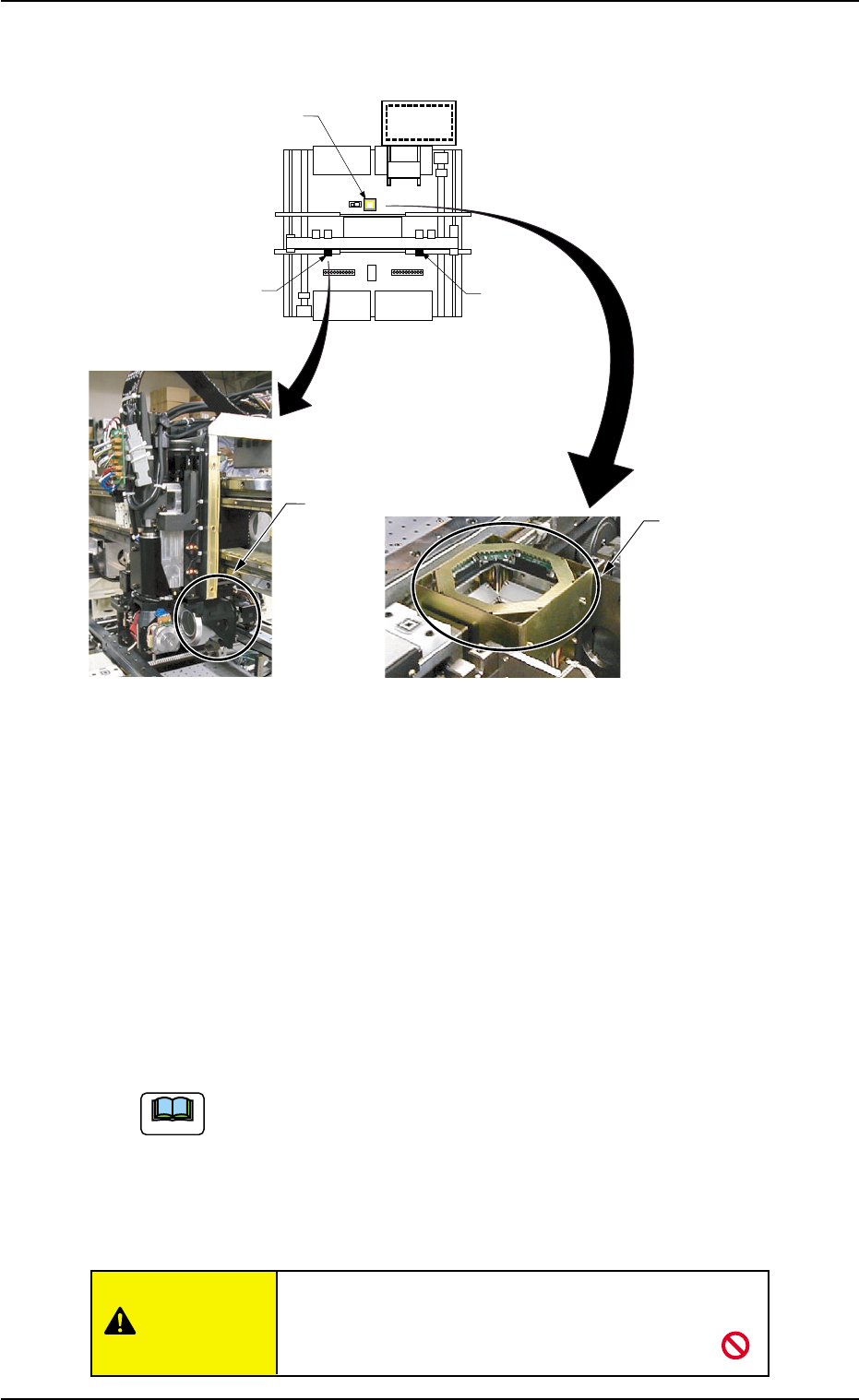
2.4.7 Component Recognition Section
Fig. 1A32
The machine is provided with a mechanism that inspects (recognizes)
the components picked up by vacuum nozzles, using three component
recognition cameras and three light sources.
Movable Cameras (2 pcs.) : Each placement head is provided with
one movable camera.
Mainly small components can be recog-
nized.
The component recognition is also pos-
sible while the X/Y beam is moving.
Fixed Camera (1 pc.) : This camera is installed beside the P.C.B.
positioning section.
Mainly large components can be recog-
nized.
The component recognition function is used to recognize the
following three items.
• Component Detection
• Inspection of Components according to the component li-
brary
• Measurement of Positional abd Angular Deviations of Com-
ponents
Do not make the protective glasses of the recognition
cameras dirty. Otherwise, the recognition
accuracy may deteriorate.
Note
0308-003 1-32 AHB01EOPP
Rear Side of Machine
Front Side of Machine
(Top View)
(Rough View)
Fixed Camera
Movable Camera
Fixed Camera A1
Movable Camera 2
Movable
Camera 1
2.4 Main Units
CAUTION
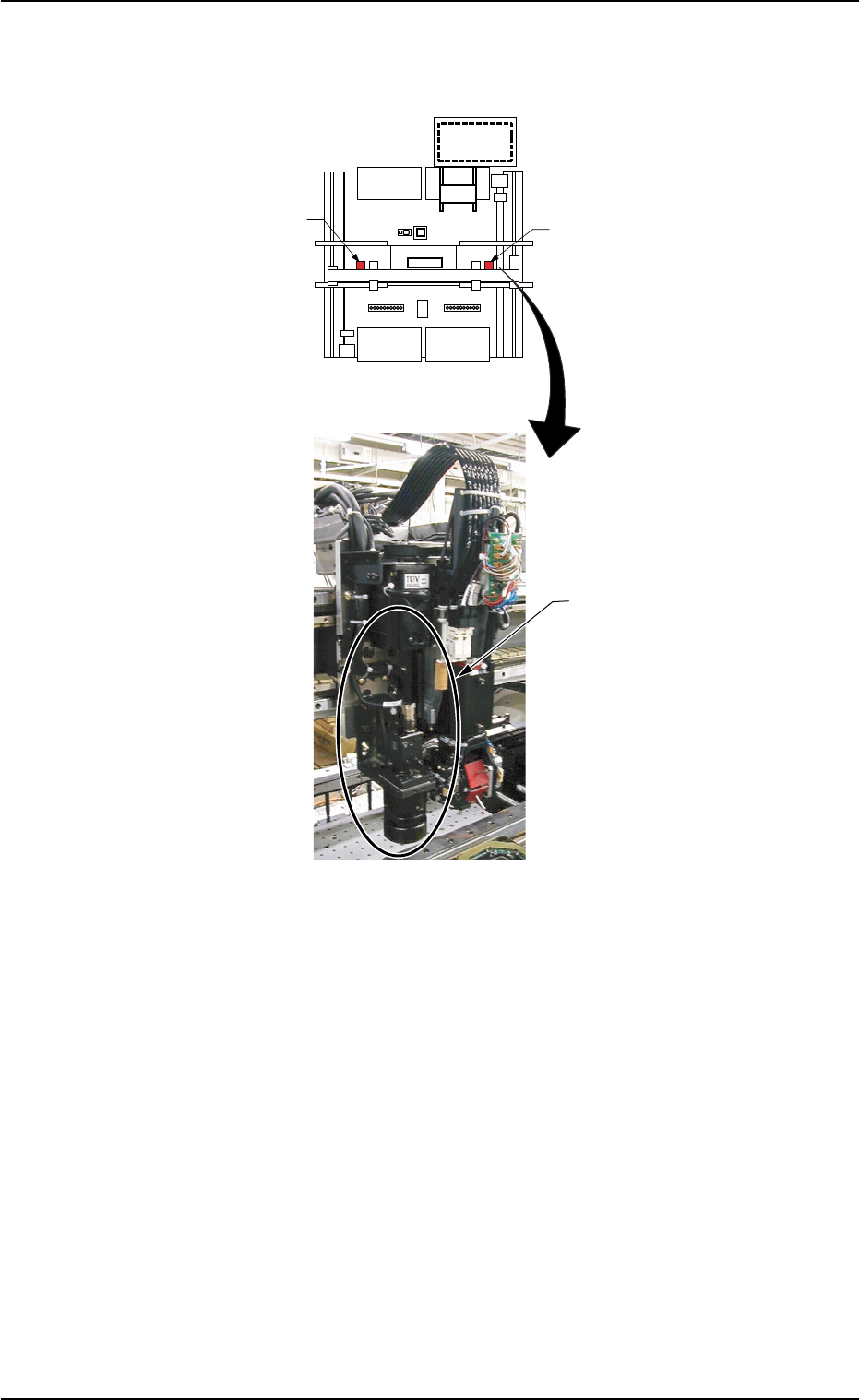
2.4.8 P.E.C. Recognition Section
Fig. 1A34
The P.E.C. recognition camera is used to detect the fiducial marks on a
P.C.B. and the amount of the positional deviation from the fiducial mark
coordinate date is calculated to automatically correct the position of a
placed component.
Each placement head is provided with one P.E.C. recognition camera.
0206-002 1-33
AHB01EOPP
P.E.C. Recognition Camera
P.E.C. Recognition Camera 1
P.E.C. Recognition Camera 2
Rear Side of Machine
Front Side of Machine
(Top View)
(Rough View)
2.4 Main Units