RP-1_使用说明书.pdf - 第100页
第 4 章 操作篇 4-6. 印刷准备 40 4-6-2. 记号的位置注册 从画面左侧 的子菜 单 中触 摸 [注册记号位置 ],显示如 下画面。 (a) 显示 (b) 中所 显示记号的相 机图 像。 (b) 选中的记 号 (c) 记号注册 分别触摸[钢网 1 ]、[基板 1 ]、[钢网 2 ]、[基板 2 ]、 [钢 网 3 ]、[基板 3 ],进行 记 号设定。 相机移动到各记 号位置,记号 显示在 (a) 的图像中。自 动进行记 …
第 4 章 操作篇
4-6.
印刷准备
39
4
(c) 刮刀的安装
刮刀移动 在安装和取下刮刀时使用。
前方:刮刀头向前方(更换位置)移动。
后方:刮刀头向后方(锡膏供给位置)移动。
(d) 钢网工作台移动按钮
钢网工作台(后方) 钢网工作台移动至装置后方。
钢网工作台(前方) 钢网工作台移动至装置前方。
Tips
•
安装备用夹具时,将钢网工作台移动至装置后方,以便于操作。
•
更换刮刀时,将钢网工作台移动至装置前方,刮刀头更靠向前方,以便于操作。
•
有关钢网与刮刀安装和取下的详情,请参阅“3-4-1. 钢网的安装”、“3-4-2.
刮刀
的安装”。
备用夹具的安装步骤
1
触摸[执行]。
相机装置左右移动。
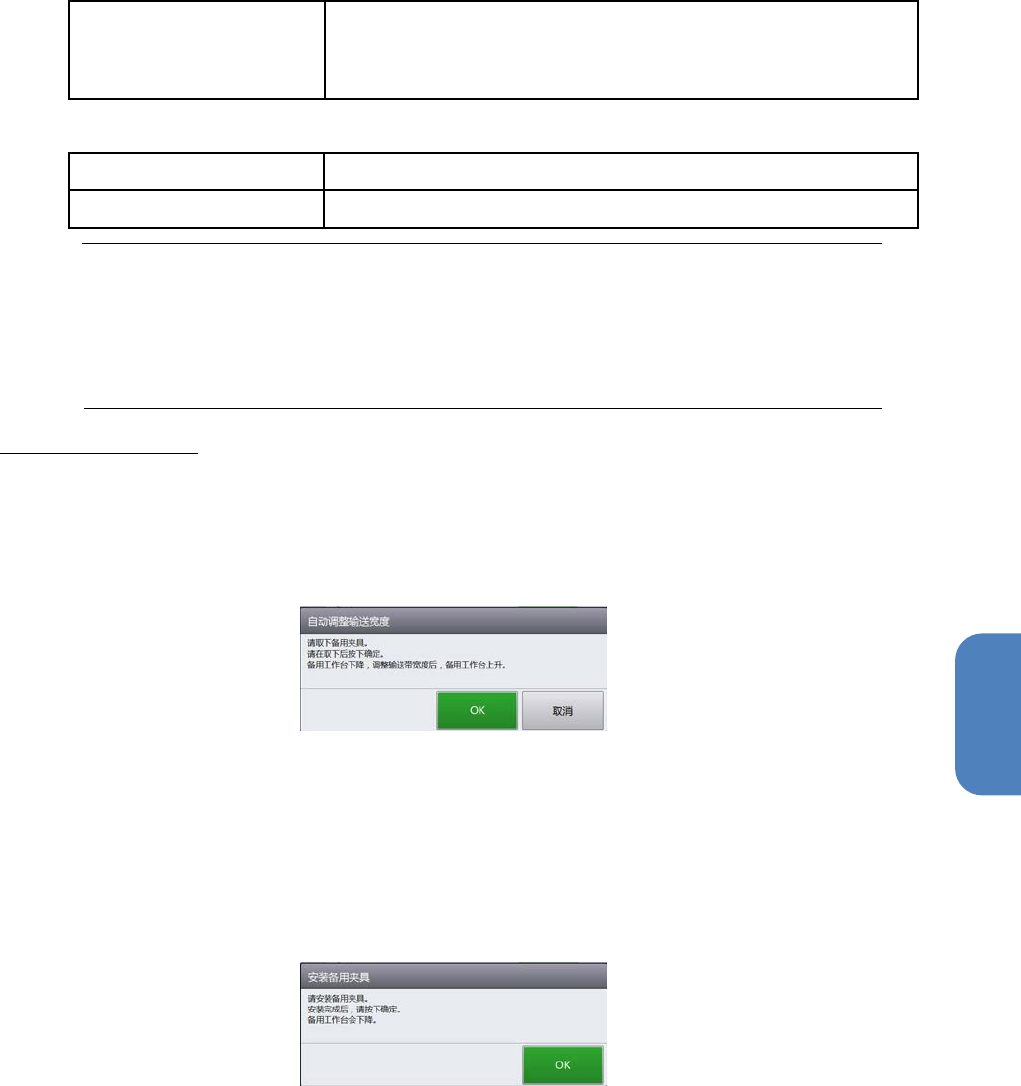
备用平台上升,显示下列对话框。
2
确认备用平台上没有夹具。如果有夹具,将其取下。
3
触摸[OK]。
备用平台下降,输送带宽度发生变动。将输送带宽度调整到比下一次生产的基板尺寸(Y)更宽
(+100 mm 左右),备用平台上升。
如果在系统设定中[使用托盘安装备用夹具]为[有效],则输送宽度一直延伸到最里面。
4
安装下一次生产所用的备用夹具。
5
安装完成后,触摸[OK]。
备用平台下降,将输送带宽度调整至下一次生产的基板尺寸(Y)。
输送带宽度调整后,备用平台上升。
第 4 章 操作篇
4-6.
印刷准备
40
4-6-2.
记号的位置注册
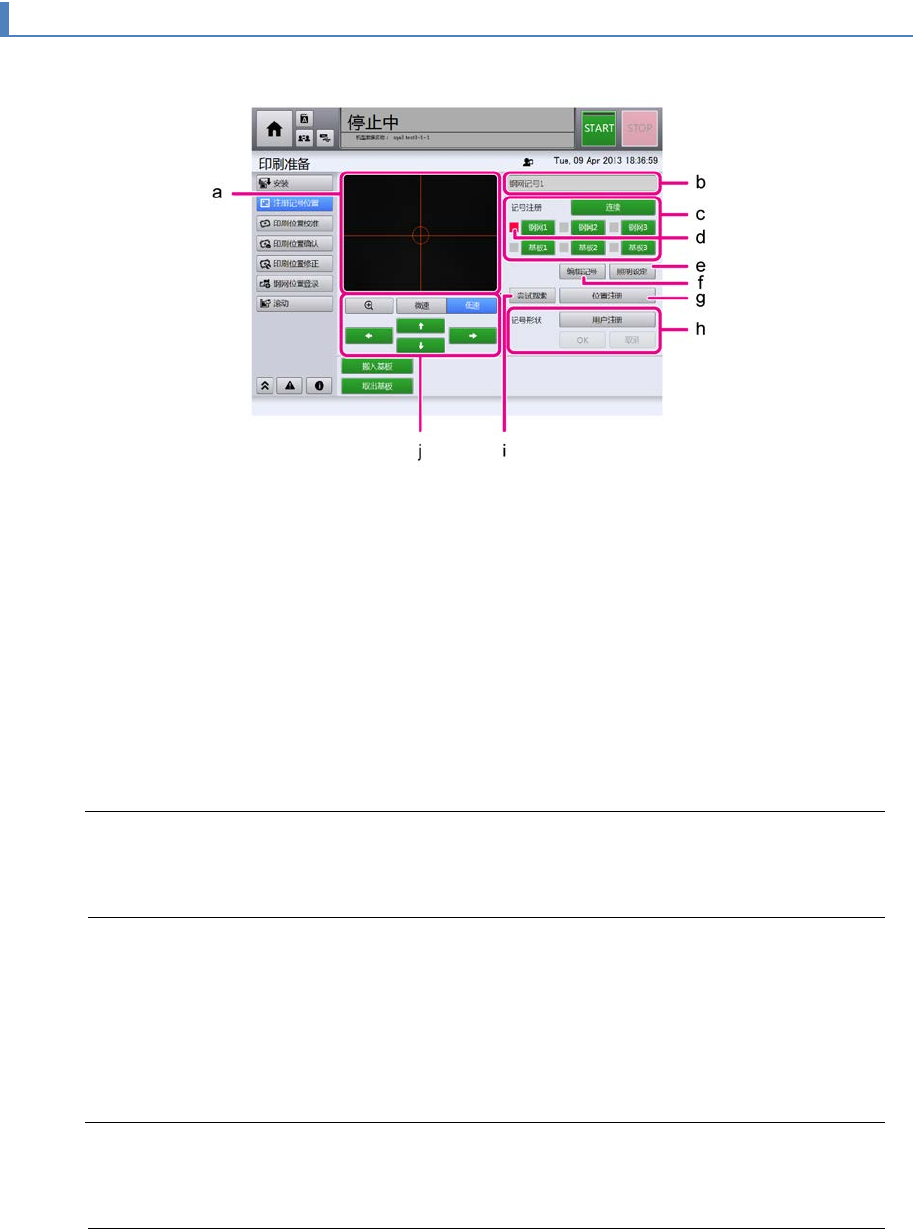
从画面左侧的子菜单中触摸[注册记号位置],显示如下画面。
(a) 显示 (b) 中所显示记号的相机图像。
(b) 选中的记号
(c) 记号注册
分别触摸[钢网 1]、[基板 1]、[钢网 2]、[基板 2]、[钢网 3]、[基板 3],进行记
号设定。
相机移动到各记号位置,记号显示在 (a) 的图像中。自动进行记号识别后,记号移动到相机图
像的中央。
如果已触摸[连续]按钮,按照[钢网 1]→[基板 1]→[钢网 2]→[基板 2]→[钢网 3]
→[基板 3]的顺序自动进行位置注册。
注意
•
如果未设定[编辑机型数据] - [基板记号] -
[共用]选项卡中的[基板记号
3],不会执行[钢网 3]与[基板 3]的记号识别。
(d) 以指示灯的颜色显示记号注册的结果。
灰色:未执行记号识别
亮绿灯:记号识别成功。
亮红灯:记号识别失败。
亮黄灯:虽然识别到记号,但相关值较低。
注意
•
请设定、调整记号位置,确保指示灯变为绿色。如果在指示灯并非绿色的状态下开始
自动运行,会发生记号识别错误。
(e) 照明设定
显示照明设定的弹出画面。有关详情,请参阅下述的“照明设定”。
第 4 章 操作篇
4-6.
印刷准备
41
4
(f) 编辑记号
显示编辑记号的弹出画面。有关详情,请参阅下述的“编辑记号”。
(g) 位置注册
可手动 (JOG) 注册记号位置。
(h) 记号形状
用户注册 显示手动注册的对话框。有关详情,请参阅下述的“识别模式的手动注册”。
OK 相机图像中设定的区域被注册为识别模式。
取消 取消操作。
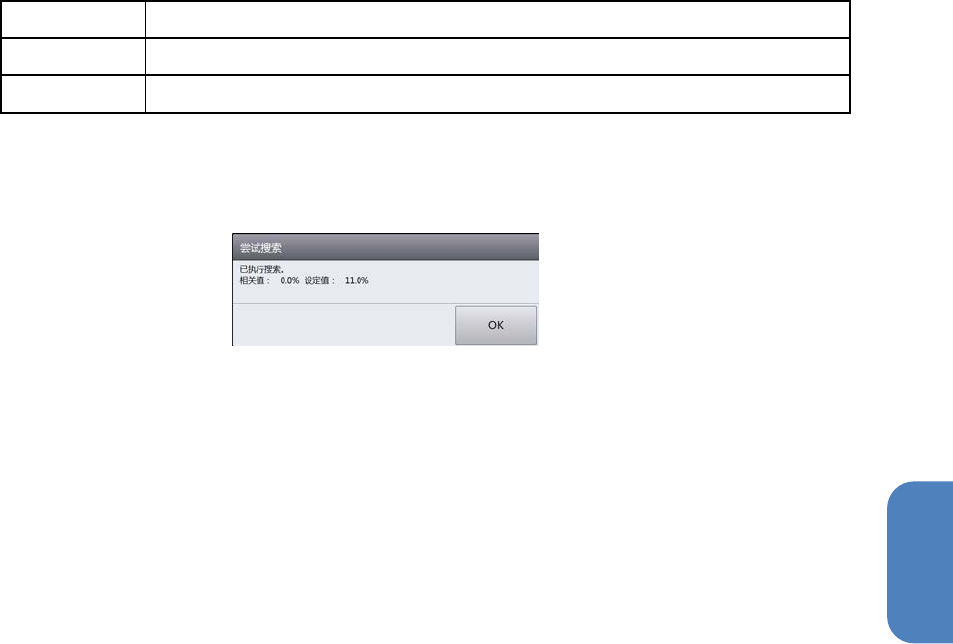
(i) 尝试搜索
按照已注册的识别模式开始搜索,并在相机图像中显示识别到的位置。另外,在如下对话框中
显示相关值。
(j) 变更相机的移动速度、缩放、进行 JOG 移动。
有关缩放的详情,请参阅下述的“放大相机图像”。