RP-1_使用说明书.pdf - 第82页
第 4 章 操作篇 4-5. 编辑机型 数据 22 4-5. 编辑机型 数据 关于印刷基板的 信息被注册到 机型数据中。 从主菜单中选择 [编辑机型数 据],显示当 前所选机型 数据的 编辑 菜单。 4-5-1. 基板数据 基板数据 1 选项卡 Tips • 用软数字键盘输 入数值。如果 软数字键盘已 关闭, 请 触摸 输入栏。会再 次显示 软数字 键盘。可输 入的数 值范围显 示在 软 数字 键盘上。 (a) 基板尺寸 输入基板外…
第 4 章 操作篇
4-4.
创建
/选择机型数据
21
4
4-4-2.
选择机型
1
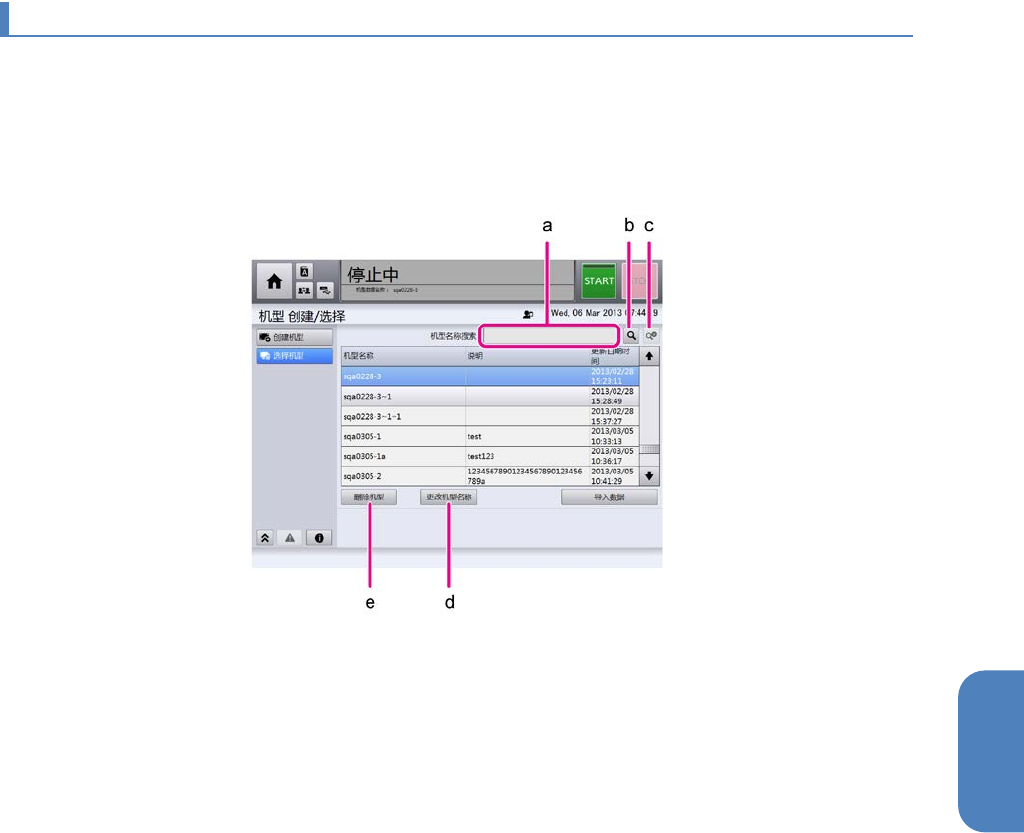
从主菜单中选择[机型 创建/选择]。
2
从画面左侧的子菜单中选择[选择机型]。
显示已注册机型的列表画面。
(a) 搜索关键字输入框
(b) 搜索按钮
(c) 解除搜索按钮
解除搜索状态,返回全部机型列表。
(d) 更改机型名称
变更所选机型的机型名称和说明。
(e) 删除机型
删除所选机型。
3
选择所需机型,触摸[导入数据]。
画面上方的共用面板机型数据名变为选中的机型。
第 4 章 操作篇
4-5.
编辑机型数据
22
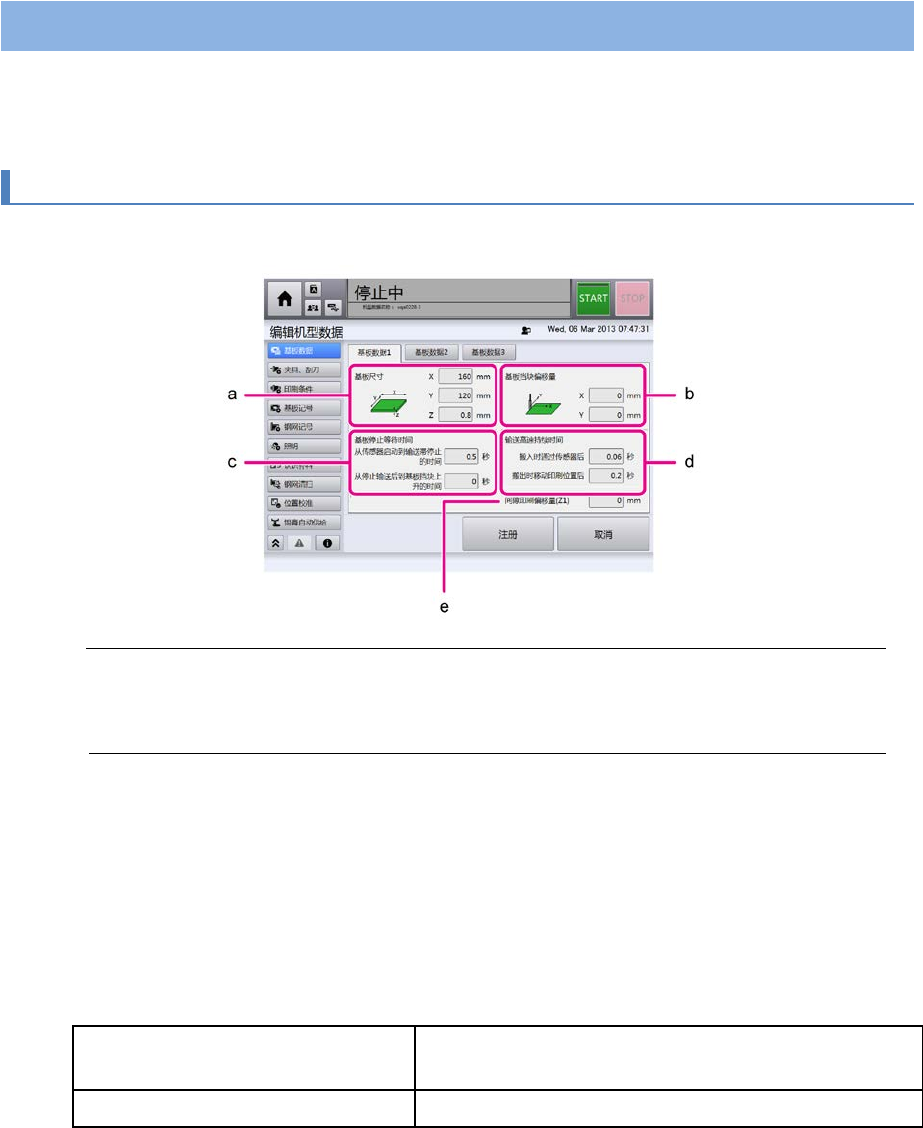
4-5. 编辑机型数据
关于印刷基板的信息被注册到机型数据中。
从主菜单中选择[编辑机型数据],显示当前所选机型数据的编辑菜单。
4-5-1.
基板数据
基板数据 1 选项卡
Tips
•
用软数字键盘输入数值。如果软数字键盘已关闭,请触摸输入栏。会再次显示软数字
键盘。可输入的数值范围显示在软数字键盘上。
(a) 基板尺寸
输入基板外形(纵横)和厚度的数值。根据该输入值设定让基板停止的位置、输送带的搬送宽
度、TZ2 轴的高度。
(b) 基板挡块偏移量
因基板切口等原因而要更改基板挡块位置时,使用此功能。
(c) 基板停止等待时间
如果基板被固定的位置不稳定,调整该数值。
从传感器启动到输送帯停止的时间 输入位于挡块前方的传感器检测到基板通过后,输送带
停止前的时间。
从停止输送后到基板挡块上升的时间
输入输送带停止后,基板挡块上升前的时间。
(d) 输送高速持续时间
输入输送带速度保持高速驱动的时间。设定搬入时通过传感器后的时间、搬出时移动印刷位置
后的时间。
(e) 间隙印刷偏移量(Z1)
输入使用低粘性锡膏进行印刷时钢网与基板的间隔。
第 4 章 操作篇
4-5.
编辑机型数据
23
4
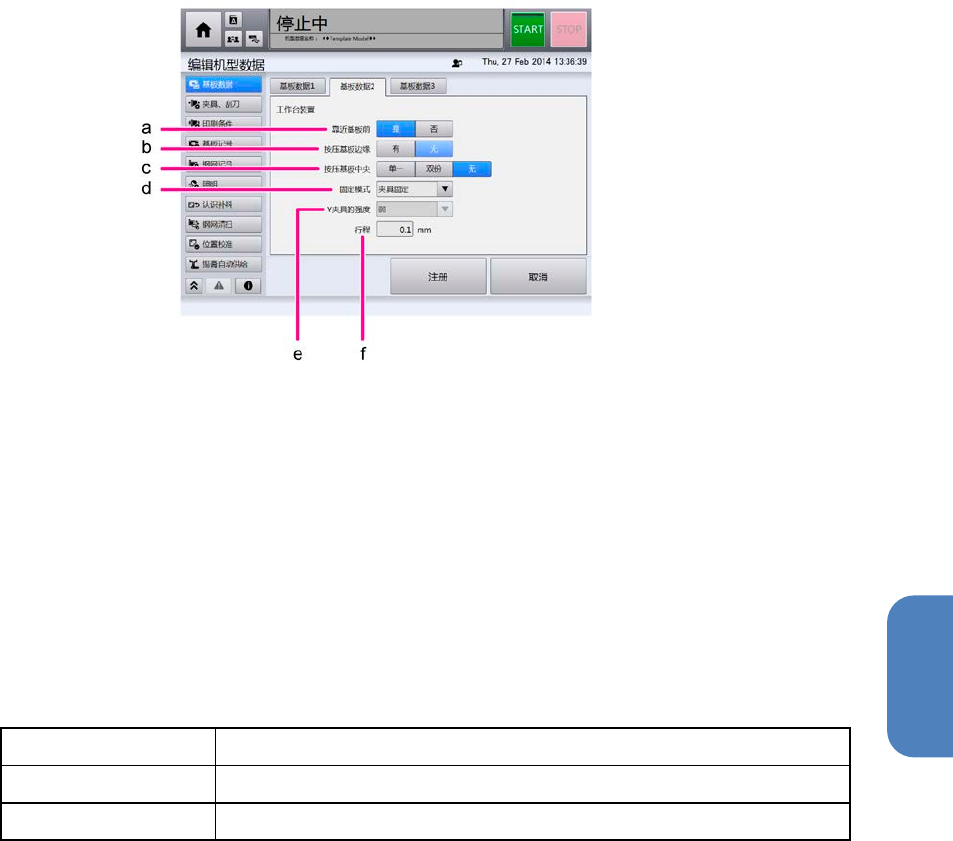
基板数据 2 选项卡
设定工作台装置。
(a) 基板前靠
选择[是]时,基板固定之前,后方的输送带向前方移动,修正基板倾斜。
(b) 按压基板边缘
选择[有]时,基板固定之前,按压基板前方与后方的边缘,修正基板翘曲。
(c) 按压基板中央
基板固定之前,按压基板中央,修正基板翘曲。根据基板大小,选择[单一](使用 1 根基板
中央压杆)或[双份](使用 2 根基板中央压杆)。 选择[无]时,不进行该动作。
(d) 固定模式
指定基板的固定方法。
吸附 用空气吸附固定。
夹具固定 用输送带轨道夹持固定。
吸附+夹具固定 用吸附和夹具固定两种方法固定。
(e) Y 夹具的强度
显示 Y 夹具固定动作的强度(扭矩大小)。 进行固定后使用。
(f) 行程
指定 Y 夹具固定的行程。让后方的输送带轨道移动到从基板尺寸 Y 位置设定的位置。但是,
如果阻力超过 Y 夹具固定强度,会在行程途中停止。
可设定的行程值范围视用户级别而异。
用户级别为[操作员]时:0.0 mm ~ 0.3 mm
用户级别在[操作员]以外时:0.0 mm ~ 1.0 mm
此功能仅当在[固定模式]中选择[夹具固定]或[吸附+夹具固定]时有效。另外,进行
[基板前靠]时也会反映此处的设定。