RP-1_使用说明书.pdf - 第88页
第 4 章 操作篇 4-5. 编辑机型 数据 28 (a) 支撑 2 段上升 备用平台的上升 速度可分为 2 档进 行设 定。 备用平台接触基板底 面之前,通过 减慢上升速度 , 将基板抬起一定 量,使备 用平台 对基板造成的冲击 控制在最低限 度。 2 段上升 选择 [是] 时,功能有 效,可设定[ 速度]与[行 程]的值。 速度 设定接触到基板 时备用平台的 上升速度。 行程 应用[速度]中 设定的值,设 定备用平台的 上升距离。 …
第 4 章 操作篇
4-5.
编辑机型数据
27
4
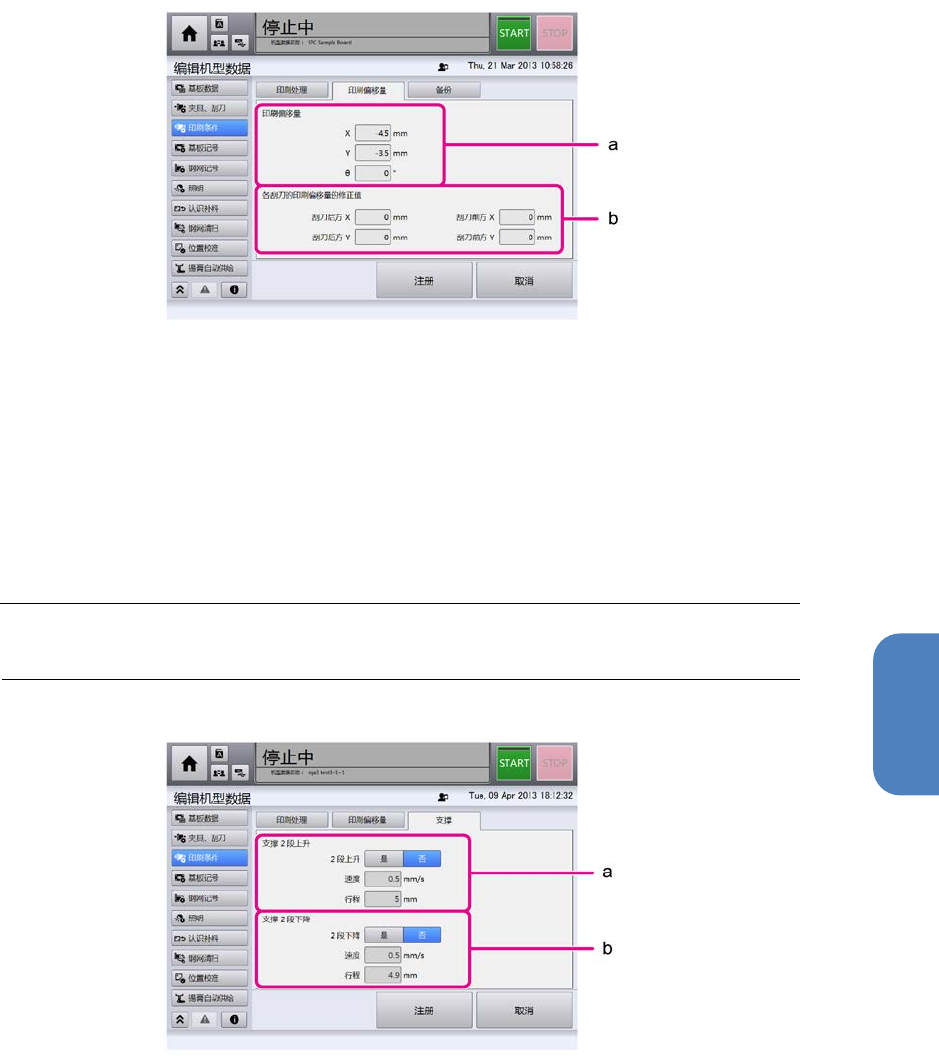
印刷偏移量选项卡
(a) 印刷偏移量
输入印刷时 X、Y、θ 的偏移量值。
[系统设定] - [印刷位置]菜单的印刷偏移量项目中勾选[注册时附加机型数据]进行注册
时,X、Y 的偏移量值被清零。
(b) 各刮刀的印刷偏移量的修正值
分别输入后方刮刀从后方往前方移动时 (刮刀后方),或前方刮刀从前方往后方移动 (刮刀前方)
时的偏移量值 (X、Y)。
Tips
•
印刷偏移量可从[印刷准备]菜单更改。
支撑选项卡
第 4 章 操作篇
4-5.
编辑机型数据
28
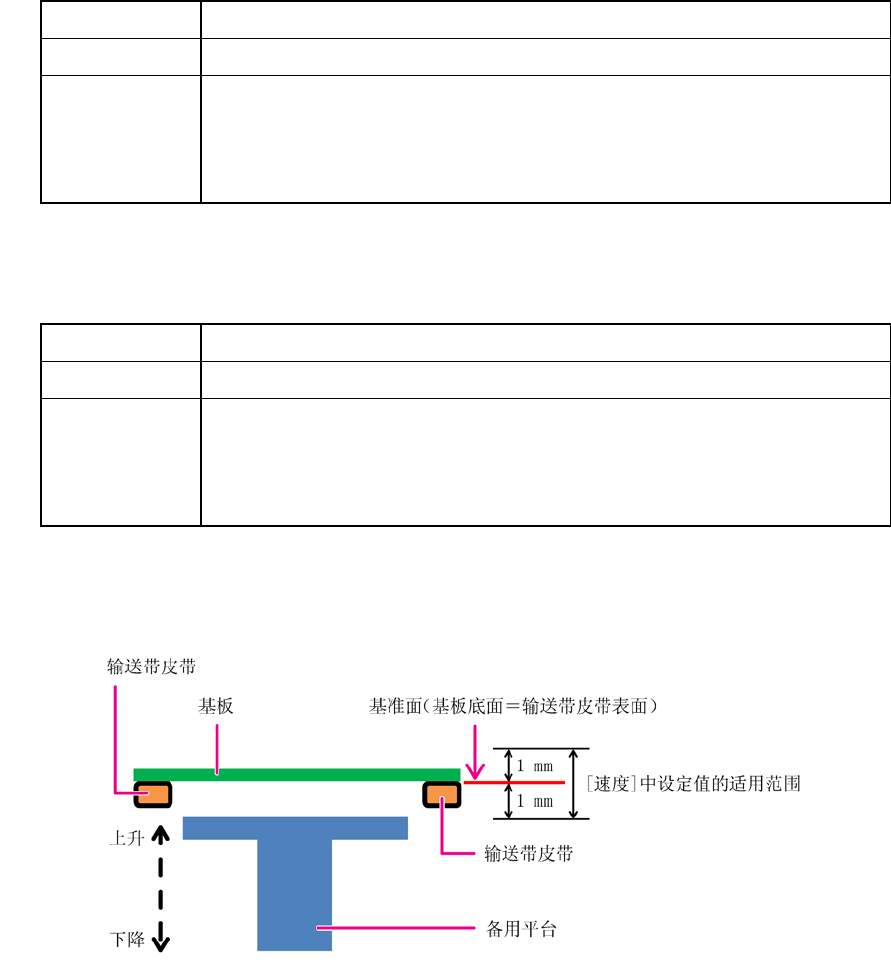
(a) 支撑 2 段上升
备用平台的上升速度可分为 2 档进行设定。备用平台接触基板底面之前,通过减慢上升速度,
将基板抬起一定量,使备用平台对基板造成的冲击控制在最低限度。
2 段上升 选择[是]时,功能有效,可设定[速度]与[行程]的值。
速度 设定接触到基板时备用平台的上升速度。
行程 应用[速度]中设定的值,设定备用平台的上升距离。
行程的适用范围(以基板底面为基准面)
起点:低于基准面,到基准面的距离为设定值的一半的位置
终点:高于基准面,到基准面的距离为设定值的一半的位置
(b) 支撑 2 段下降
备用平台的下降速度可分为 2 档进行设定。在输送带皮带的表面与基板底面接触之前降低下降
速度,使输送带皮带对基板造成的冲击控制在最低限度。
2 段下降 选择[是]时,功能有效,可设定[速度]与[行程]的值。
速度 设定输送带皮带接触基板底面时备用平台的下降速度。
行程 应用[速度]中设定的值,设定备用平台的下降距离。
行程的适用范围(以输送带皮带表面为基准面)
起点:高于基准面,到基准面的距离为设定值的一半的位置
终点:低于基准面,到基准面的距离为设定值的一半的位置
从基板搬入方向查看的基板与备用平台
将[行程]设定为 2mm 时的例子
印刷后检查选项卡(选购项)
有关印刷后检查的设定。有关详情,请参阅“7-5-6.设定是否启用印刷后检查功能和检查频率”。
第 4 章 操作篇
4-5.
编辑机型数据
29
4
4-5-4.
基板记号
从画面左侧的子菜单中选择[基板记号],显示如下画面。
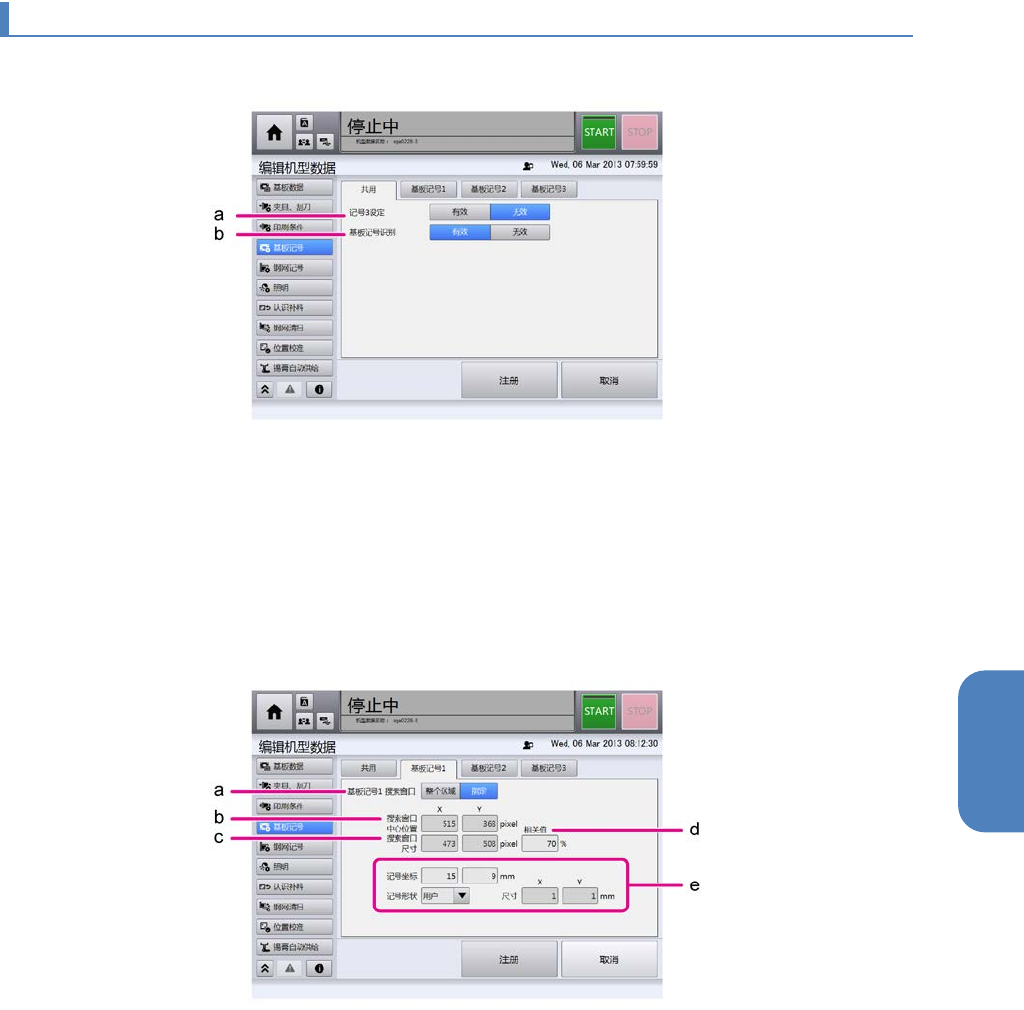
共用选项卡
(a) 记号 3 设定
选择是否使用第 3 个基板记号。此设定会自动应用至第 3 个钢网记号。
(b) 基板记号识别
选择是否进行基板的记号识别。
基板记号 1~基板记号 3 选项卡
(a) 搜索窗口
选择搜索记号的区域是整个相机图像区域还是搜索窗口中指定的区域。
有关搜索窗口区域的指定方法详情,请参阅“4-6-2. 记号的位置注册”。
(b) 搜索窗口中心位置
确认搜索记号的图像显示区域的横向 X 与纵向 Y 的中心坐标值。
(c) 搜索窗口尺寸
确认以搜索记号的图像显示区域的横向 X 与纵向 Y 的中心坐标为原点时的大小。