RP-1_使用说明书.pdf - 第32页
第 2 章 系统概要 2-2. 设备规格 4 钢网清扫 根据设定的条件 ,清洁装置会 从钢 网反面 进行清扫 。 使用清洁用纸和 清洗刮板,去 除附着在钢网 反面的锡 膏、助 焊剂。 2-2-3. 机器规格 基板规格 项目 规格 基板尺寸 50mm × 50mm × t0.4mm ~ 610mm × 510 mm × t5.0mm 基板背面零件高 度 最大 25mm 搬送方向 右→左、左→右 基板固定 真空、 Y 轴外形 夹具 …
第 2 章 系统概要
2-2. 设备规格
3
2
2-2. 设备规格
2-2-1.
自动化范围
本机可自动进行如下工序。
•
调整印刷基板搬送输送带宽度
•
搬入印刷基板
•
将印刷基板定位到输送带中央
•
基板与钢网的位置修正
•
印刷与离网
•
基板搬出
需手动进行如下操作。
•
更换刮刀
•
更换钢网
•
安装印刷基板支架部
•
供给锡膏
•
清扫钢网反面
•
机型数据的创建和设定
2-2-2.
功能和动作
搬送印刷基板
直接将基板从前工序机器搬入印刷工作台。
在印刷工作台上固定基板
基板在输送带上停止后,基板支架部上升,然后基板翘曲矫正部动作。
按入基板后,用吸附装置或 Y 形夹具固定。
定位修正
通过基板识别相机读取基板上的识别记号,进行位置修正处理运算。根据得出结果,进行钢网 XY
轴、θ 轴修正,完成基板与钢网的位置校准。
印刷
印刷工作台上升,使基板与钢网紧密接触。下降后的刮刀在钢网上方移动,进行印刷。
基板与钢网的分离
控制基板和用于固定基板的基板支架部速度,使其下降。然后,印刷工作台整体下降。
基板搬出
解除固定,基板被送回输送带,搬送至待机位置,从后工序装置输入就绪信号后,将基板搬出。
第 2 章 系统概要
2-2. 设备规格
4
钢网清扫
根据设定的条件,清洁装置会从钢网反面进行清扫。
使用清洁用纸和清洗刮板,去除附着在钢网反面的锡膏、助焊剂。
2-2-3.
机器规格
基板规格
项目
规格
基板尺寸 50mm × 50mm × t0.4mm ~ 610mm × 510mm × t5.0mm
基板背面零件高度 最大 25mm
搬送方向 右→左、左→右
基板固定 真空、Y 轴外形夹具
印刷速度 10mm/s ~ 200mm/s
印刷压力 20N ~ 200N
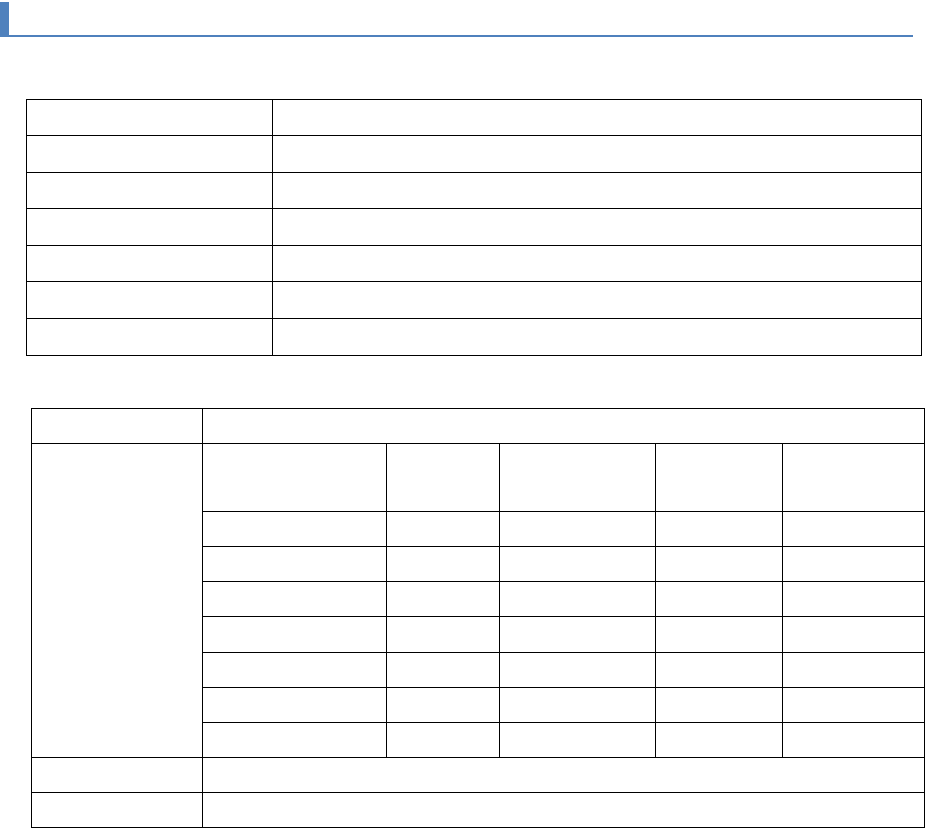
钢网
项目
规格
大小
屏幕尺寸
X,Y
框架幅
基板寸法
X,Y
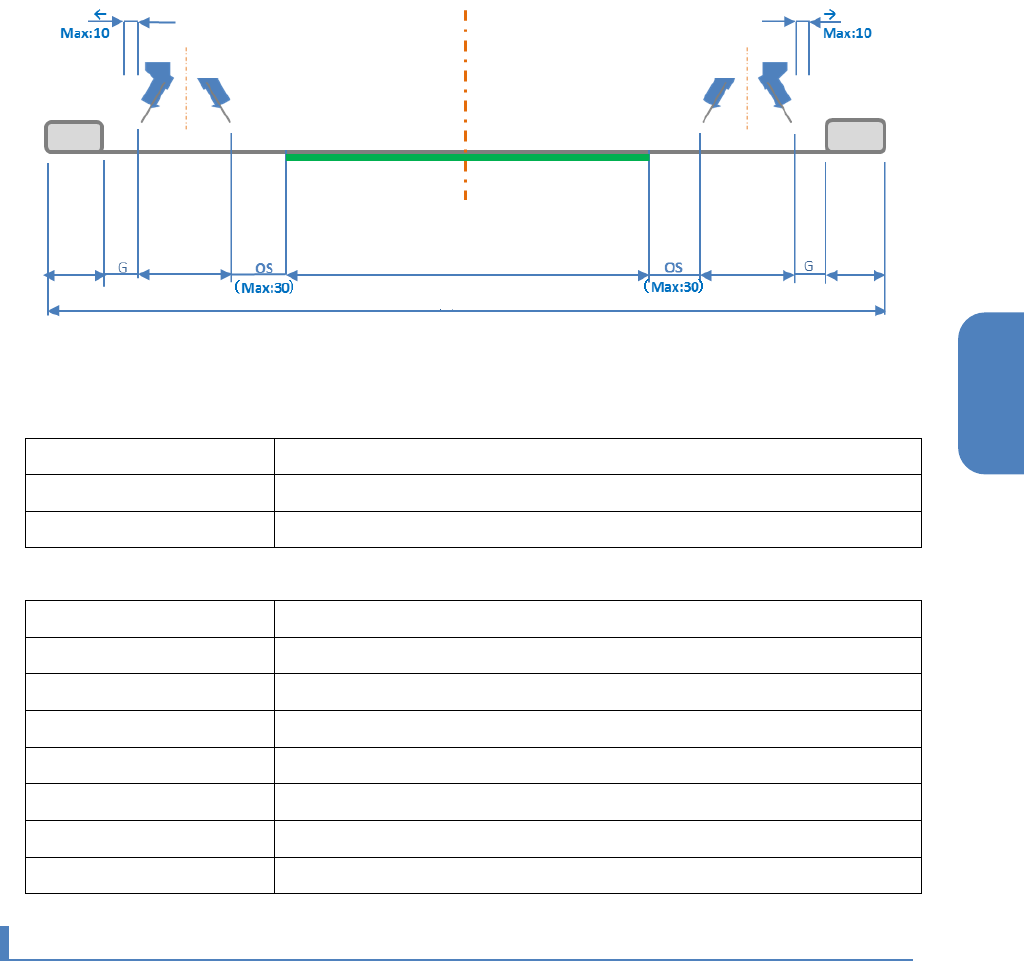
超行程
(OS)
框架〜刮刀端
(G)
550 x 650 mm
40 mm 250 x 330 mm 20 mm 20 mm
600 x 550 mm 40 mm 330 x 250 mm 20 mm 10 mm
650 x 550 mm
40 mm 330 x 250 mm 20 mm 10 mm
736 x 736 mm
40 mm 610 x 410 mm 20 mm 23 mm
736 x 736 mm
30 mm 610 x 450 mm 20 mm 13 mm
750 x 750 mm
40 mm 610 x 410 mm 20 mm 30 mm
750 x 750 mm
30 mm 610 x 510 mm 5 mm 5 mm
厚度 t30 mm ~ t40 mm
倒角 中央
第 2 章 系统概要
2-2. 设备规格
5
2
刮刀
项目
规格
材质 金属(标准)、氨甲酸酯橡胶(硬度 90°/选件)
长度 260mm、340mm、480mm、620mm
其他
项目
规格
装置外形 W 1,310mm × D 1,470mm × H 1,530mm(含信号塔时为 1,830 ㎜)
装置重量 约 1,000kg
相机构成 HC-HR70 配备上和下视野共用镜头
自动调整输送带宽度 标配
清扫 清洁用纸擦拭、真空吸嘴共用
OS Windows 7
语言 日文、英文、中文(简体)、中文(繁体)
2-2-4.
标准附属品
•
CD-ROM 1 张
收录内容
- 本说明书
- 零件列表安全重要说明书(12 种语言)1 本
•
机器数据 USB 内存 1 个
•
脚座 4 个
•
吊环螺栓盖 4 个
•
输送带皮带 一套
屏幕尺寸 Y
基板寸法 Y
框架 框架
焊料回收功能 焊料回收功能