RP-1_使用说明书.pdf - 第133页
第 4 章 操作篇 4-10. 手动操作 73 4 4-10-2. 工作台 工作台的手动操 作包括[钢网 固定]、[基 板固定]、 [工作台] 3 种 。从画面左侧 的子菜单中 选择 [工作台],设 定各 选项卡 。 钢网固定 (a) 钢网夹具 / 钢网 宽度锁定 操作[钢网夹具 ]、[钢网宽 度锁定] 的固定 / 解除 。 解除[钢网夹具 ]中,指示灯 亮绿 灯。 (b) 钢网工作 台 / 钢网工作台旋转 方向(顺时针 旋转 / 逆时…
第 4 章 操作篇
4-10.
手动操作
72
4-10. 手动操作
在手动操作中,可操作如下项目。有关各项操作的详情,请参阅各项目的说明页面。
•
原点复归 (4-10-1.)
•
工作台 (4-10-2.)
•
相机、照明 (4-10-3.)
•
刮刀 (4-10-4.)
•
手动钢网清扫 (4-10-5.)
•
输送带 (4-10-6.)
•
锡膏供给操作(4-10-7.)
•
机内照明(4-10-8.)
4-10-1.
原点复归
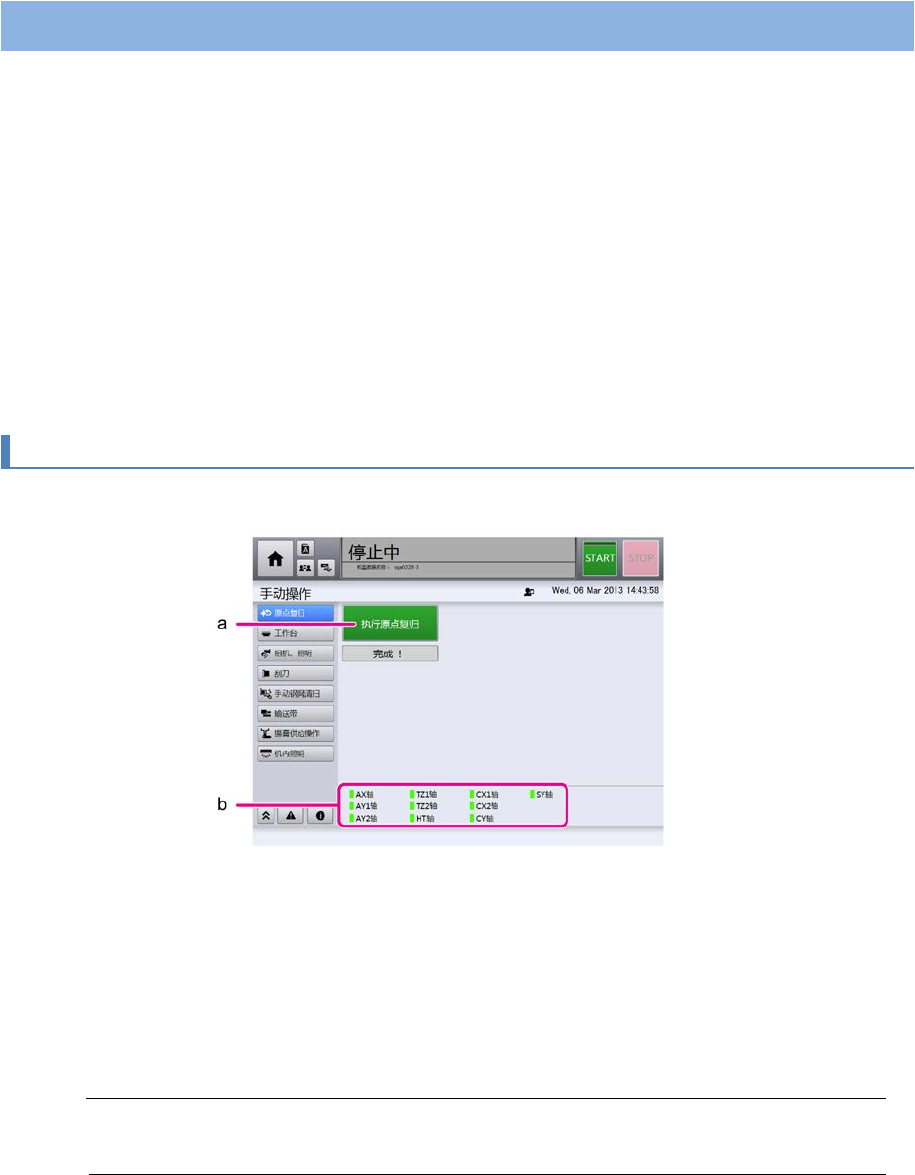
从画面左侧的子菜单中选择[原点复归],显示如下画面。
(a) 执行原点复归
开始原点复归。
(b) 显示各轴的原点复归状态。
亮绿灯:完成
闪烁橙灯:执行中
灰色:未实施
注意
•
刮刀 (SY) 轴在本机电源接通后仅进行 1 次重置原点动作。
第 4 章 操作篇
4-10.
手动操作
73
4
4-10-2.
工作台
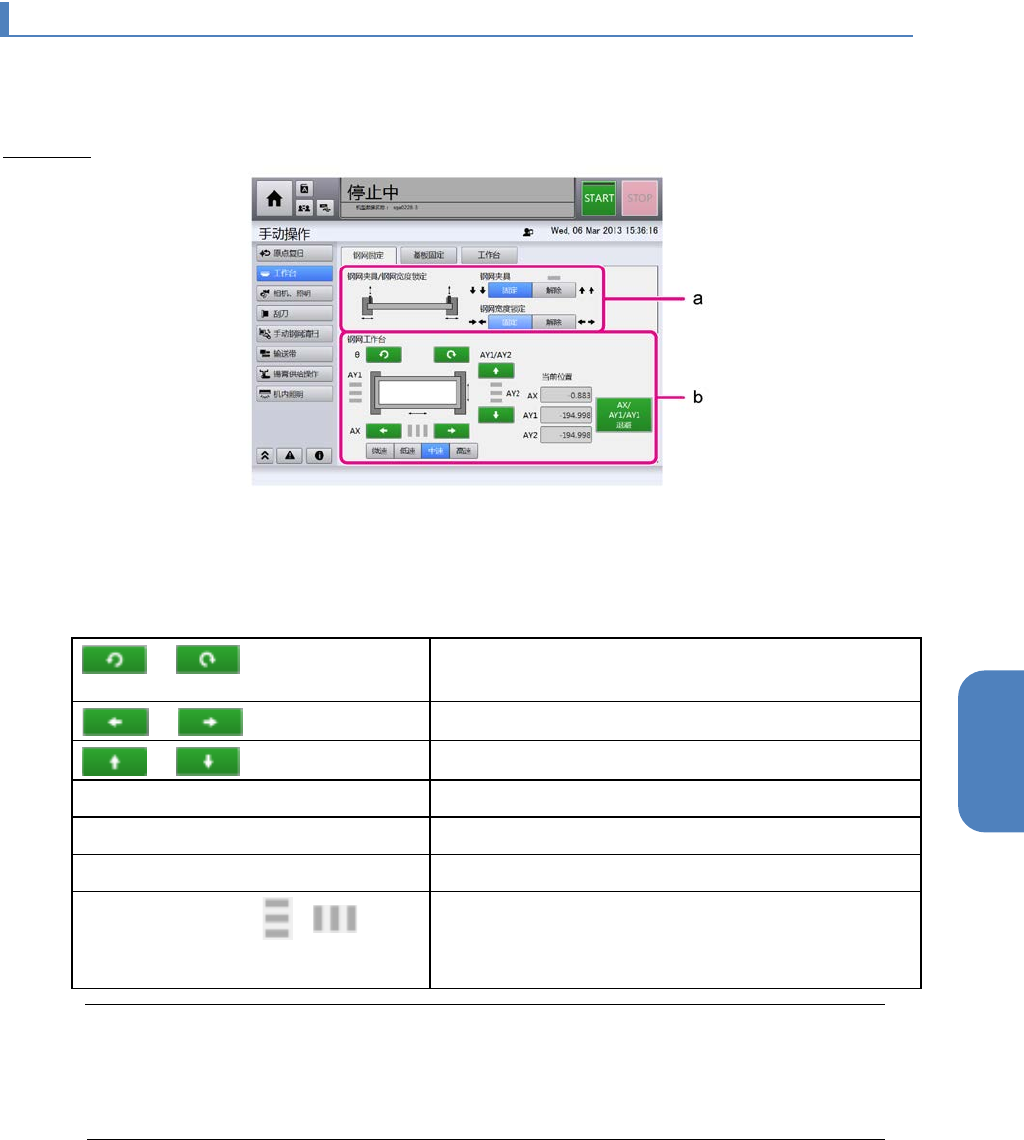
工作台的手动操作包括[钢网固定]、[基板固定]、[工作台]3 种。从画面左侧的子菜单中选择
[工作台],设定各选项卡。
钢网固定
(a) 钢网夹具/钢网宽度锁定
操作[钢网夹具]、[钢网宽度锁定]的固定/解除。 解除[钢网夹具]中,指示灯亮绿灯。
(b) 钢网工作台
/
钢网工作台旋转方向(顺时针旋转/逆时针旋转)的
微动运行
/
钢网工作台(横向)的微动运行
/
钢网工作台(纵向)的微动运行
低速/高速/中速/高速 钢网工作台(微动运行)的速度选择
AX/AY1/AY1 退避 AX 轴与 AY1 轴和 AY2 轴同时移动达到退避位置
当前位置 各轴的当前坐标位置
检测传感器指示器( 或 )
左或下(显示红色):负极限
中央(显示黄色):原点
右或上(显示红色):正极限
注意
•
负极限、正极限是分别根据各传感器的检测显示极限,通常(软件极限正常发挥功能
时)不会变为红色显示。
•
微动运行时,到达软件极限则会显示警告对话框,无法继续移动。
第 4 章 操作篇
4-10.
手动操作
74
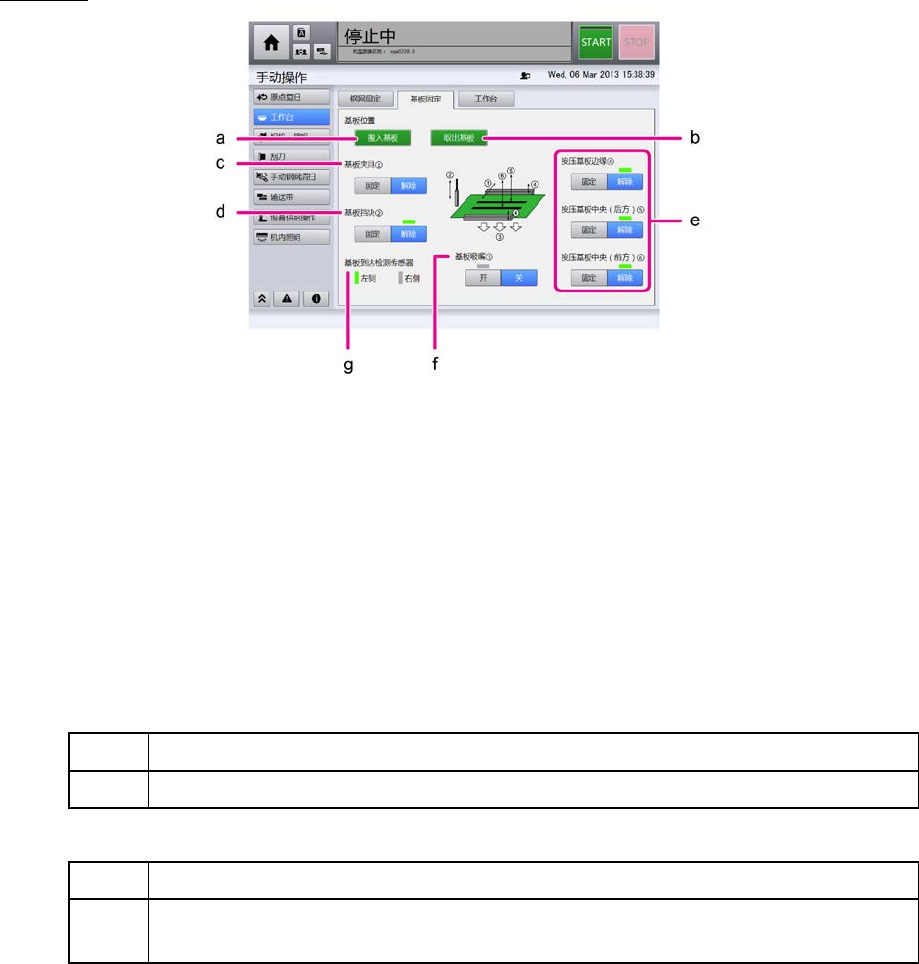
基板固定
(a) 搬入基板
搬入基板。
触摸按钮,显示基板搬入的对话框。将基板放置到输送带上,触摸[OK]。基板搬入到印刷位
置,备用平台上升。
(b) 取出基板
解除固定在印刷位置上的基板。
触摸按钮,备用平台下降,基板放置到输送带上,显示取出基板的对话框。取出基板,触摸
[OK]。相机装置执行有无基板的确认动作,然后停止。
(c) 基板夹具的固定/解除
固定 后方的输送带向前方移动,变为夹紧基板的状态。
解除 后方的输送带向后方移动,变为解除基板夹紧的状态。
(d) 基板挡块的固定/解除
固定 随相机装置附带的基板挡块下降。
解除 随相机装置附带的基板挡块上升。位于解除位置时,[解除]按钮上的指示灯亮绿
灯。