RP-1_使用说明书.pdf - 第139页
第 4 章 操作篇 4-10. 手动操作 79 4 4-10-4. 刮刀 从画面左侧 的子菜 单中选择[刮刀] ,显示如下画 面。 (a) 用数字 键盘 输 入刮刀速 度。 (b) 刮刀位置 后方/ 前方 刮刀向后方 / 前方移 动。 / 刮刀往上下方向 JOG 移动。 检测传 感器指 示器 ( ) 上(显示红色) :正极限 中央(显示黄色 ):原点 下(显示红 色): 负极限 (c) 设定刮刀 的移动速度 (d) 刮刀头 (后方 / …
第 4 章 操作篇
4-10.
手动操作
78
显示照明设定的弹出画面,可设定钢网与基板照明的开/关,以及各处照明的强度(比例)。
可触摸
/ 按钮调整。
注意
•
负极限、正极限是分别根据各传感器的检测显示极限,通常(软件极限正常发挥功能
时)不会变为红色显示。
•
微动运行时,到达软件极限则会显示警告对话框,无法继续移动。
Tips
•
触摸数值输入区域,显示滑块(
),移动滑块调整亮度。
第 4 章 操作篇
4-10.
手动操作
79
4
4-10-4.
刮刀
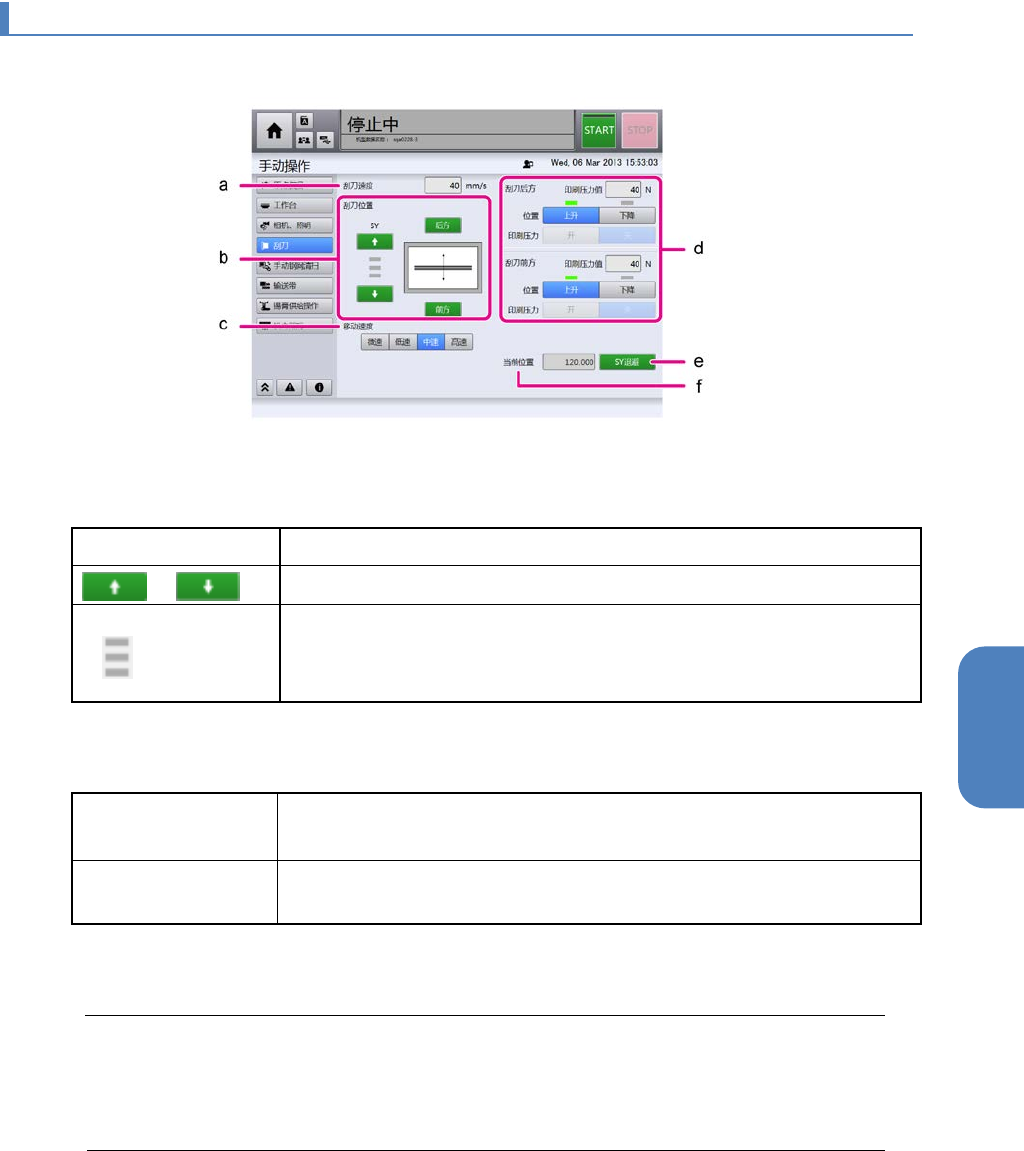
从画面左侧的子菜单中选择[刮刀],显示如下画面。
(a) 用数字键盘输入刮刀速度。
(b) 刮刀位置
后方/前方 刮刀向后方/前方移动。
/
刮刀往上下方向 JOG 移动。
检测传感器指示器
(
)
上(显示红色):正极限
中央(显示黄色):原点
下(显示红色):负极限
(c) 设定刮刀的移动速度
(d) 刮刀头(后方/前方)的设定
上升/下降 刮刀头移动至上升极限/下降极限。
上升状态、下降状态下,各指示器亮绿灯。
开/关 触摸[开]后,就将根据设定的印刷压力下降。触摸数值,将显示键
盘,可变更数值。
(e) SY 轴移动到退避位置。
(f) 显示刮刀的当前位置。
注意
•
负极限、正极限是分别根据各传感器的检测显示极限,通常(软件极限正常发挥功能
时)不会变为红色显示。
•
微动运行时,到达软件极限则会显示警告对话框,无法继续移动。
第 4 章 操作篇
4-10.
手动操作
80
4-10-5.
手动钢网清扫
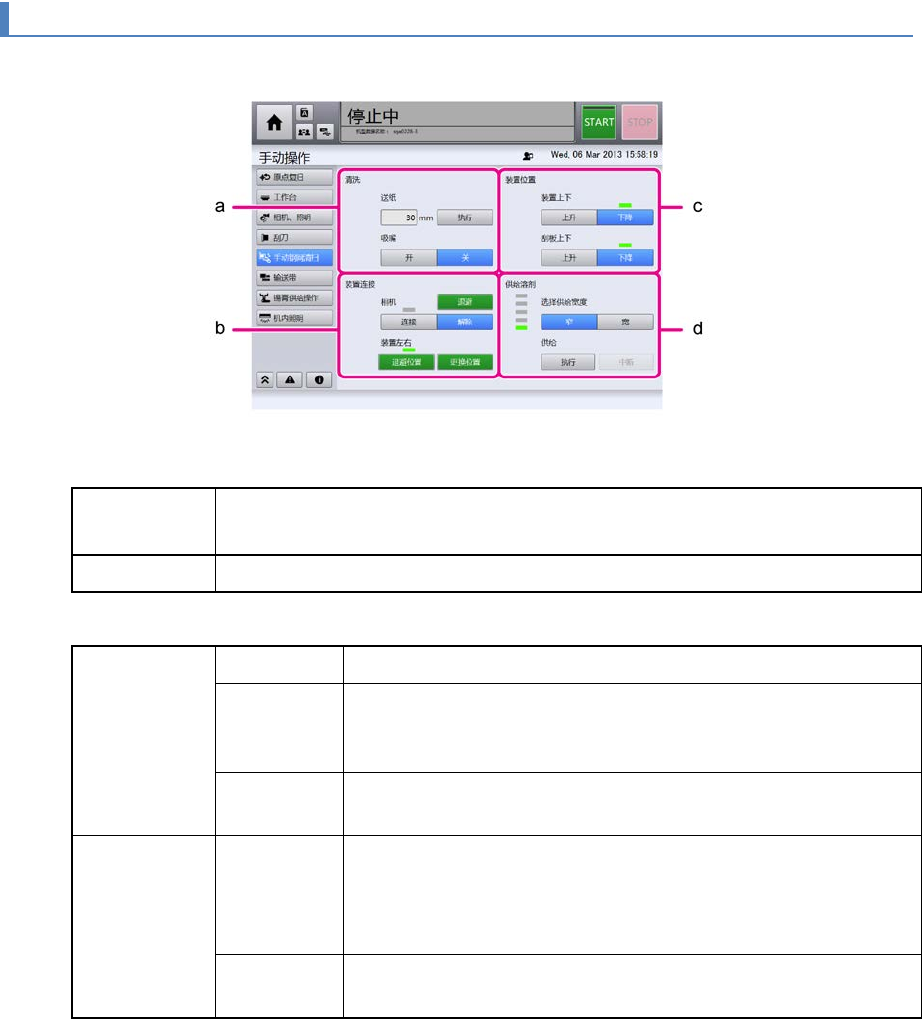
从左侧的子菜单中选择[手动钢网清扫],显示如下画面。
(a) 清洗
送纸 进行清洁用纸的送纸。
触摸[执行],根据已输入的数值进行送纸。
开/关 设定吸嘴的开/关。
(b) 装置连接
相机 退避 相机移动到退避位置(装置右侧)。
连接 与清洁装置附带的相机装置之间的连接汽缸处于连接状态(汽
缸突出于相机)。摄像机不在连接位置上时,应手动将其移动
到连接位置,然后触摸[连接]。
解除 与清洁装置附带的相机装置之间的连接汽缸处于断开状态(汽
缸突出于相机的反方向)。
装置左右 退避位置 清洁装置移动到退避位置(装置左侧)。位于退避位置时,指
示灯亮绿灯。
实际上,是相机装置向装置左侧移动,将清洁装置顶至退避位
置。此时,连接汽缸必须设定为[解除]。
更换位置 相机装置移动到装置中央附近。此时,如果处于与清洁装置连
接的状态,清洁装置也向装置中央附近(交换位置)移动。
(c) 装置位置
上升/下降:装置、刮板分别移动到上升极限/下降极限。 移动至下降极限时,指示器亮绿灯。