RP-1_使用说明书.pdf - 第136页
第 4 章 操作篇 4-10. 手动操作 76 (a) 整个工作台 上升/ 下降 整个工作台移动 至软件极限的 上升极限 / 下降 极 限。 / 整个工作台往上 下方向微动运 行。 检测传感器指示 器( ) 上(显示红色) :正极限 中央(显示黄色 ):原点 下(显示红 色): 负极限 (b) 备用工作 台 上升/ 下降 备用平台移动至软件极 限的上升极限 / 下降极限( 标 准)。 / 备用平台往上下 方向 JOG 移 动。 检测传感…
第 4 章 操作篇
4-10.
手动操作
75
4
(e) 按压基板的固定/解除
④、⑤等编号对应显示在画面上的示意图。
按压基板边缘④ 固定 将基板夹具固定在上方的汽缸上升,变为固定基板边缘的状态。
解除 将基板夹具固定部分固定在上方的气缸下降,变为解除固定基板边
缘的状态。
按压基板中央
(后方)⑤
固定 随相机装置附带的基板中央压杆(后方)下降。
解除 随相机装置附带的基板中央压杆(后方)上升。
按压基板中央
(前方)⑥
固定 随相机装置附带的基板中央压杆(前方)下降。
解除 随相机装置附带的基板中央压杆(前方)上升。
各压杆位于解除位置时,[解除]按钮上的指示灯亮绿灯。
(f) 基板吸嘴的开/关
开 基板吸嘴抽真空。抽真空时,[开]按钮上的指示灯亮绿灯。
关 基板吸嘴停止抽真空。
(g) 基板到达检测传感器
基板到达检测传感器变为 ON,指示灯亮绿灯。基板搬送方向为右 → 左时使用右侧传感器,基
板搬送方向为左 → 右时使用左侧传感器。
工作台
第 4 章 操作篇
4-10.
手动操作
76
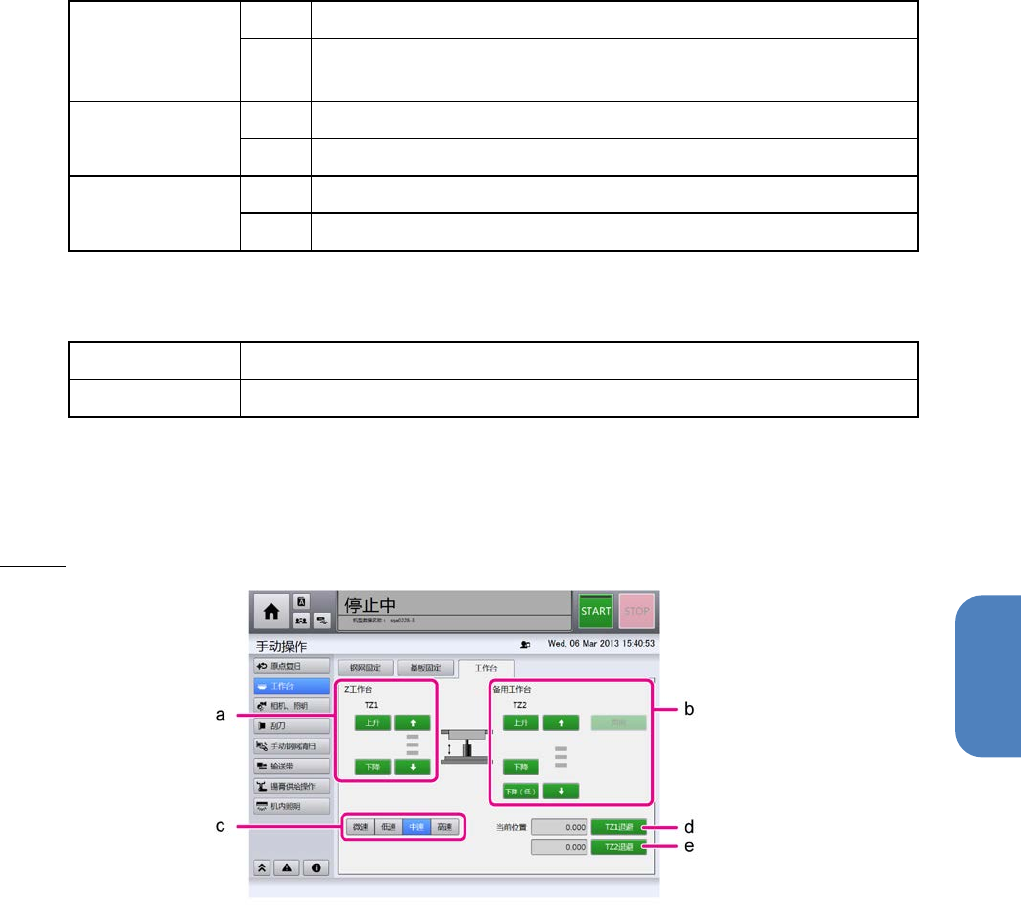
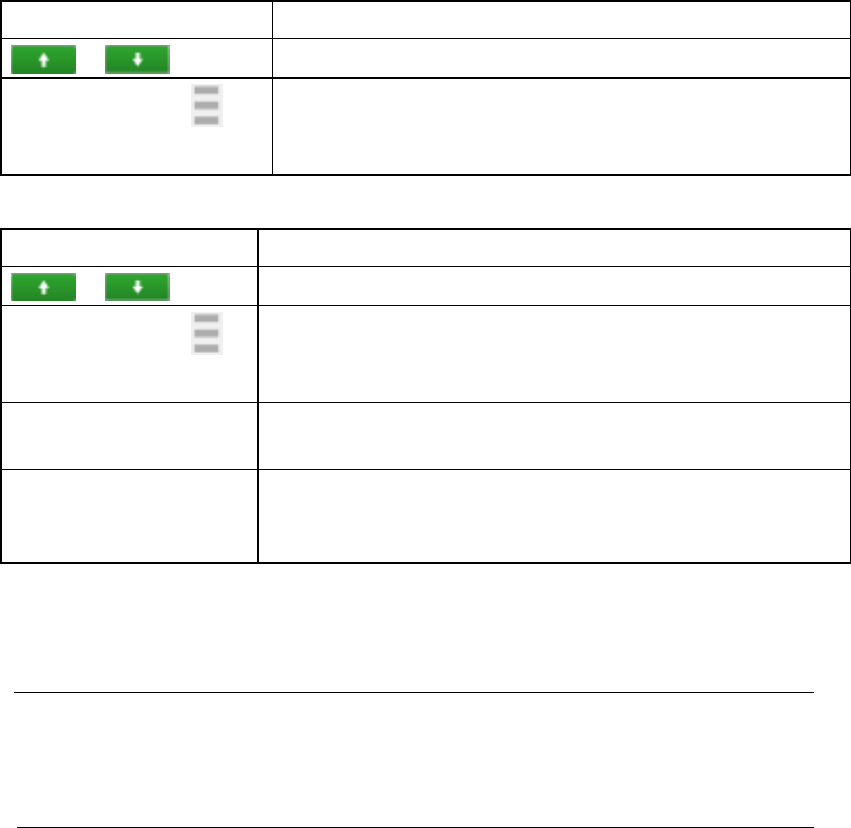
(a) 整个工作台
上升/下降 整个工作台移动至软件极限的上升极限/下降极限。
/
整个工作台往上下方向微动运行。
检测传感器指示器( )
上(显示红色):正极限
中央(显示黄色):原点
下(显示红色):负极限
(b) 备用工作台
上升/下降 备用平台移动至软件极限的上升极限/下降极限(标准)。
/
备用平台往上下方向 JOG 移动。
检测传感器指示器( )
上(显示红色):正极限
中央(显示黄色):原点
下(显示红色):负极限
离网 若在上升状态时触摸,备用平台将移动至离开钢网的位置。
按照机型数据中注册的条件执行离网。
下降(低) 将备用平台下降到低于下降极限(标准)的位置。
该位置是基板传感器将备用夹具错误识别为基板搬入时使用。有
关详情,请参阅“4-5-2. 夹具、刮刀”。
(c) 整个工作台/备用平台的移动速度设定
(d) TZ1 轴移动到退避位置。
(e) TZ2 轴移动到退避位置。
注意
•
负极限、正极限是分别根据各传感器的检测显示极限,通常(软件极限正常发挥功能
时)不会变为红色显示。
•
微动运行时,到达软件极限则会显示警告对话框,无法继续移动。
第 4 章 操作篇
4-10.
手动操作
77
4
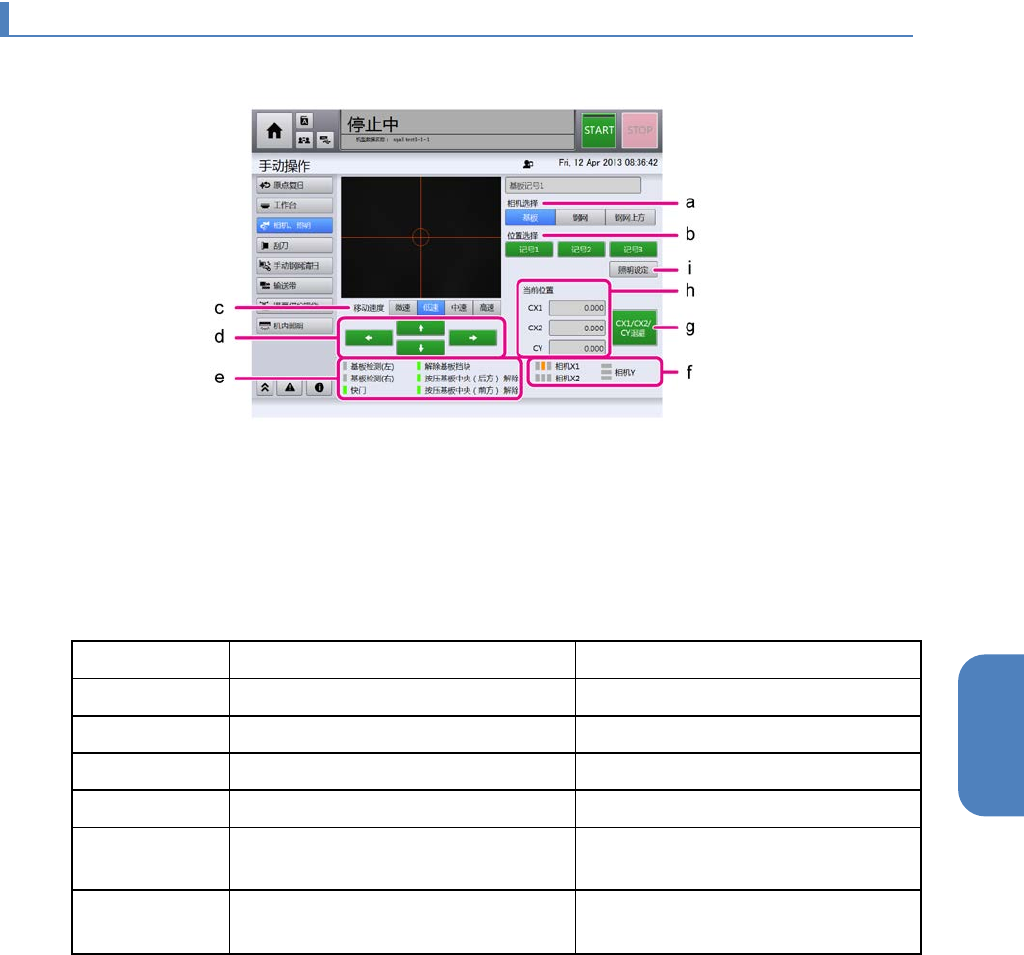
4-10-3.
相机、照明
从画面左侧的子菜单中选择[相机、照明],显示如下画面。
(a) 选择相机画面中显示的相机。
(b) 选择相机画面中显示的记号位置。
(c) 设定相机的移动速度
(d) 相机的 JOG 移动方向
(e) 各传感器的检测动作指示器
指示器
绿色(亮灯)
灰色(熄灯)
基板检测(左) 基板搬出传感器(左)打开的状态 基板搬出传感器(左)关闭的状态
基板检测(右) 基板搬出传感器(右)打开的状态 基板搬出传感器(右)关闭的状态
快门 相机图像识别下方(基板)的状态 相机图像识别上方(钢网)的状态
解除基板挡块 基板挡块升起的状态 左述以外的状态
按压基板中央
(后方) 解除
基板中央压杆(后方)上升的状态 左述以外的状态
按压基板中央
(前方) 解除
基板中央压杆(前方)上升的状态 左述以外的状态
(f) 检测传感器指示器
左或下(显示红色):负极限
中央(显示黄色):原点
右或上(显示红色):正极限
(g) CX1 轴/CX2 轴/CY 轴同时移动到退避位置。
(h) 各轴的当前坐标位置
(i) 照明设定