YSM20R_YSM20WR_Ope_K.pdf - 第117页
2-16 2 5. [ 축이동 ] 버튼 수동 으로 축을 움 직 일 경우에 사용합니 다 . [ 축이동 ] 버 튼을 누 르 면 , 「축이동 」화 면 이 표시됩 니 다 . 화면상의 탭 을 전환해 서 이동 시킬 축 을 선 택하 고 , [ 화 살 표 ] 버튼 또는 [PT P ] 버튼 으 로 축을 임의 의 위치 로 이동 시킬 수 가 있습 니다 . 「축 이동」 화면 1 2 3 5 4 6 7 8 2 8 …

2-15
2
4. [ 컨베이어폭 ] 버튼
컨베이어 폭을 생산할 기판 (PCB) 폭에 맞춥니다 .
[ 컨베이어폭 ] 버튼을 누르면 ,「컨베이어 폭」대화창이 표시되므로 , 컨베이어 폭을 확인하고 [OK] 버튼을 눌러 주십시오 .
컨베이어가 지정된 폭으로 변경됩니다 .
「컨베이어 폭」화면
28206-K M K-0 0
YSM20WR 듀얼 레인에서는 , 레인별로 변경할 컨베이어 폭을 지정할 수가 있습니다 .
한쪽 레인만 사용할 경우는 , 사용하지 않는 레인의 체크를 해제하고 컨베이어 폭을 입력해 주십시오 .
「컨베이어 폭」화면
듀얼레인
28237 - K MK-0 0
c
주의
컨베이어폭조정시 ,컨베이어레일이푸쉬업핀등에접촉하지않도록 ,반드시사전에확인해주십시오 .
2-16
2
5. [ 축이동 ] 버튼
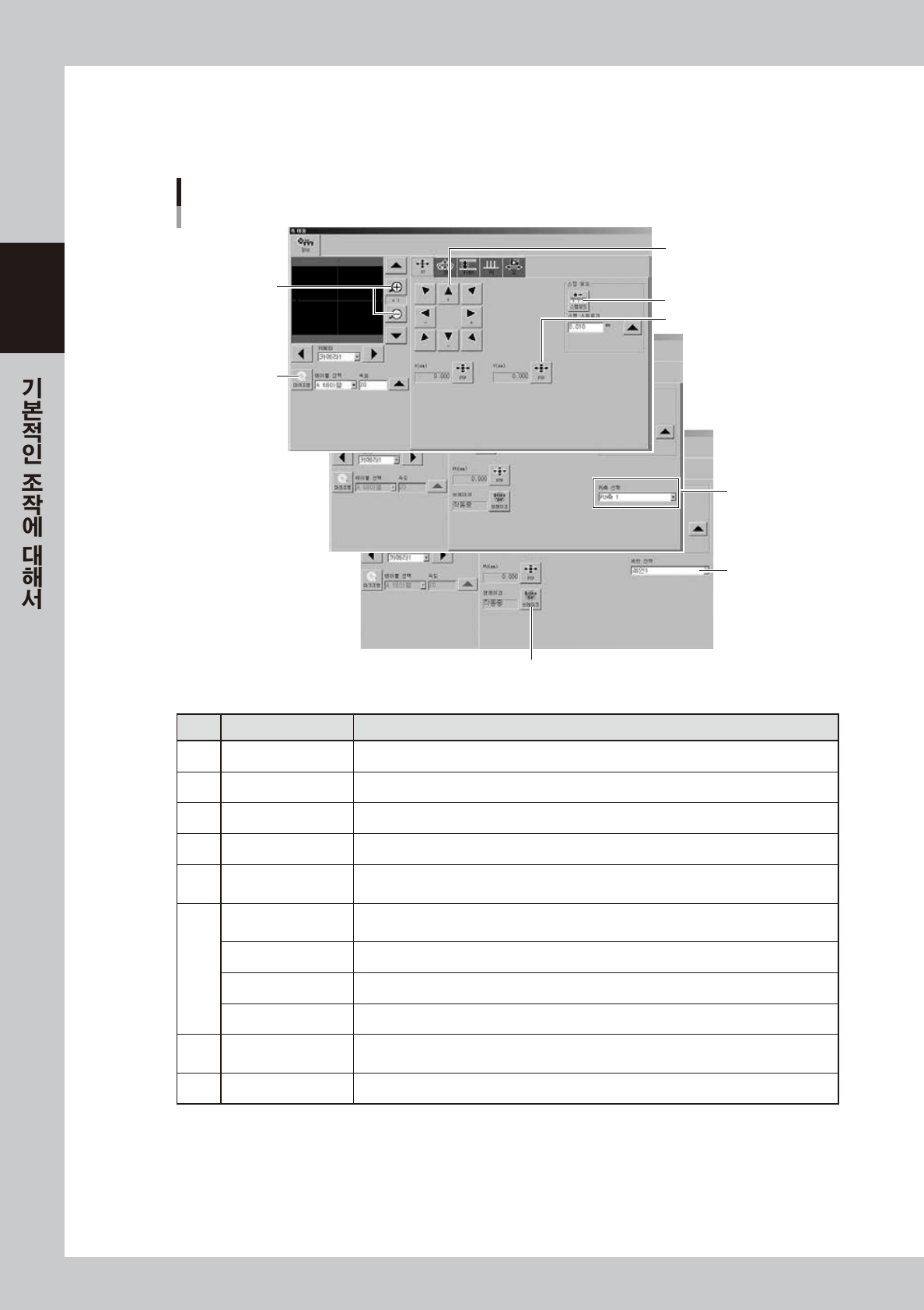
수동으로 축을 움직일 경우에 사용합니다 . [ 축이동 ] 버튼을 누르면 , 「축이동」화면이 표시됩니다 .
화면상의 탭을 전환해서 이동시킬 축을 선택하고 , [ 화살표 ] 버튼 또는 [PTP] 버튼으로 축을 임의의 위치로 이동시킬 수가
있습니다 .
「축 이동」 화면
1
2
3
5
4
6
7
8
28207-K M K-10
버튼명 기능
1 확대 ,축소 (+ , −) 화상의확대 ,축소를실행합니다 .(16 배 ~1/16 배 )
2 마크조명 카메라의조명을수동으로변경할수있습니다 .데이터에는영향을미치지않습니다 .
3 PTP 수치를입력한좌표로대상물이이동합니다 .
4 화살표 이동방향으로대상물을이동시킬때사용합니다 .길게누르면빠르게동작합니다 .
5 스탭모드
화살표키를한번눌렀을때의움직이는양을스탭스트로크로지정합니다 .
[ 스탭모드 ] 버튼이눌러져있으면 ,화살표키를길게눌러도빠르게동작하지않습니다 .
6
헤드선택
조작할헤드를선택합니다 .(Z 축 ,R 축만 )
단 ,R 축은복수의헤드가동시에회전합니다 .
컨베이어선택 조작할컨베이어를선택합니다 .( 듀얼스테이지만 )
U 축선택 조작할U 축을선택합니다 .( 듀얼스테이지만 )
PU 축선택 조작할PU 축을선택합니다 .( 듀얼스테이지만 )
7 브레이크
비상정지상태에서 ,브레이크를해제할때사용합니다 .(PU 축만 )
서보 ON 하면 ,자동적으로브레이크는해제됩니다 .
8 레인선택 듀얼레인에서양쪽레인을사용할경우에조작할레인을선택합니다 .(Width 축 ,PU 축 )
2-17
2
■
컨베이어수동조작2
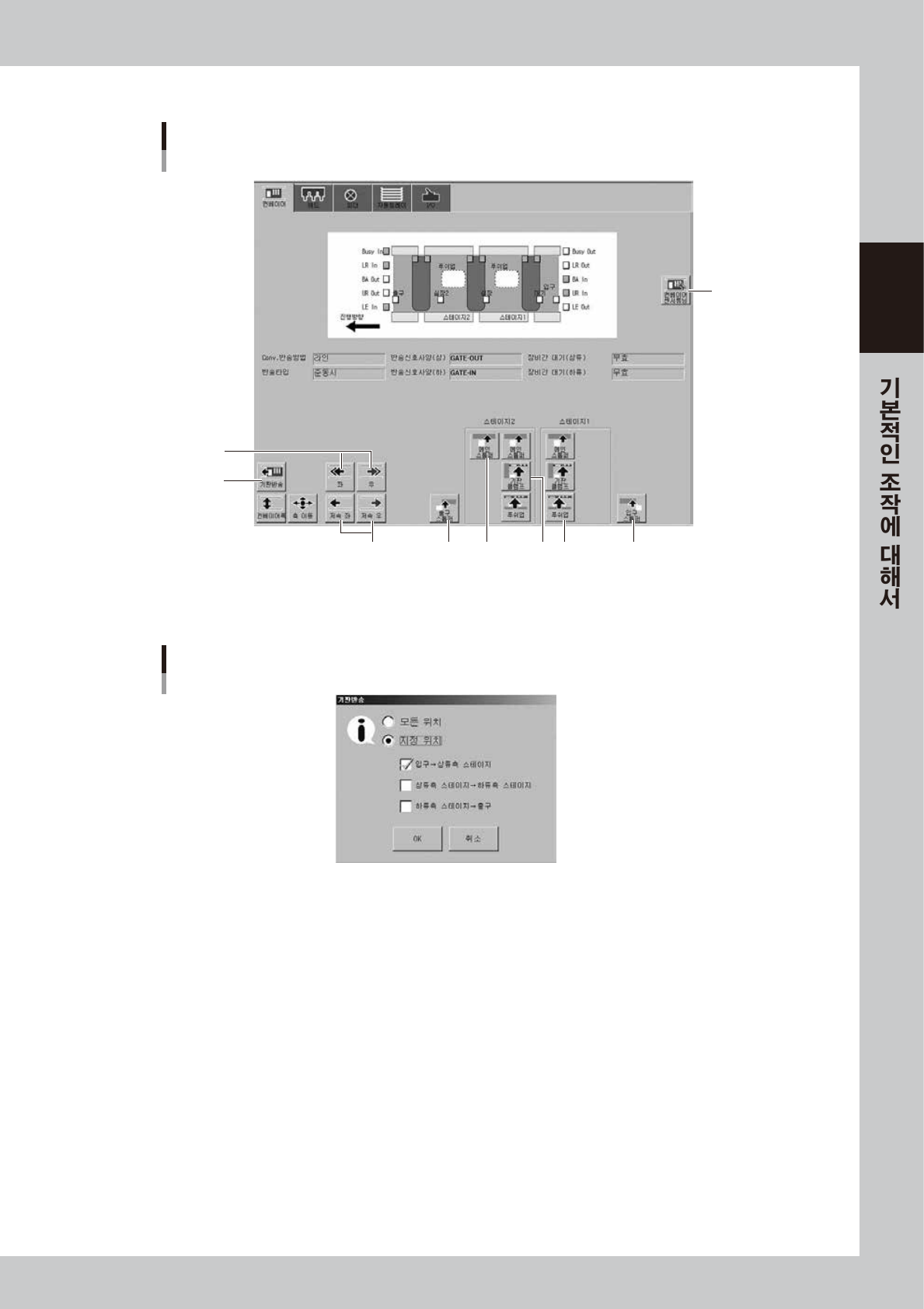
[장치] - 「컨베이어」 화면
컨베이어 수동 버튼:YSM20R 듀얼 스테이지 화면
6
7
14
8
9 10 11 12 13
28208-KM K-10
6. [ 기판반송 ] 버튼 ( 듀얼스테이지 )
[ 기판반송 ] 버튼을 누르면 , 다음과 같은 화면이 표시됩니다 .
「기판반송」 화면
28209-KMK-00
・
모든위치
모든 위치를 선택하면 ,「입구→상류측 스테이지」,「상류측 스테이지→하류측 스테이지」,「하류측 스테이지→출구」로
반송을 실행합니다 .
・
지정위치
체크박스에 지정된 구간만 반송을 실행합니다 . 전부 체크하면 ,「모든 위치」와 같은 동작을 실행합니다 .
7. [ 좌 ],[ 우 ] 버튼
좌측 또는 우측으로 컨베이어 모터를 고속으로 돌립니다 .
8. [ 저속좌 ],[ 저속우 ] 버튼
좌측 또는 우측으로 컨베이어 모터를 저속으로 돌립니다 .
9. [ 출구스톱퍼 ] 버튼
출구 스톱퍼를 상승 / 하강시킵니다 . 반출할 기판을 출구에서 멈출 때 사용합니다 .
10.[ 메인스톱퍼 ] 버튼
메인 스톱퍼를 상승 / 하강시킵니다 . 컨베이어내에 반입된 기판을 실장위치에서 멈출 때 사용합니다 .