YSM20R_YSM20WR_Ope_K.pdf - 第89页
1-56 1 6.3 멀 티 카메라 인식장치 멀티 카메라 사이드 조명 <멀티 카메라> 멀티 카메라의 외주 부분이 상승한다 <멀티 카메라 사이드뷰 조명> 271 3 1-KMK-00 █ 멀 티카메라 ( 옵 션 ) FM 헤드유닛으로부 품탑재 를실행할경우또는 ,HM 헤드유닛 의스캔카메라로인식할수없는사이즈의부 품 ( 이하요 점참조 ) 을인식하 기…

1-55
1
6.2 사이드뷰 기능 ( 스캔 / 사이드뷰 카메라 )
스캔 카메라나 사이드뷰 카메라로 부품과 노즐을 옆 방향에서 인식함으로 인해 , 다음의 기능을 사용할 수가
있습니다 .
█ 흡착이상검지기능
심플모드
부품의미흡착을확실하게검출하여 ,미실장을방지할수있습니다 . 노즐세척등으로노즐이바뀌어도 ,그대로운용할수있습니
다.
상세모드
부품의미흡착을확실하게검출하여 ,미실장을방지할수있습니다 . 세로 ,가로 ,경사등의이상흡착을사용자가설정하는부품
두께공차에준하여판정합니다 .
█ 노즐오염검지기능
부품인식에서 「부품있음」 이라고인식한것이라도 ,사이드뷰기능에서 「부품없음」 이라고판단한경우에는 「노즐오염」 으로간주
하여 ,경고메세지를표시합니다 .
이로인해 ,노즐세척의타이밍을보다명확하게할수가있습니다 .
█ 부품폐기동작스킵기능
사이드뷰기능에서 「부품없음」 이라고판단한경우에는 ,폐기동작을스킵합니다 .
이로인해 ,부품미흡착시의쓸데없는동작을줄여서택타임저하를경감시킵니다 .
█ 흡착상태복귀검지기능
부품을탑재한후와폐기한후에 ,노즐선단에부품의유무를확실하게검출합니다 .
█ 부품반전체크기능
부품을흡착한후의인식처리에서흡착부품의표리가반전되어있는지체크합니다 .또한 ,이때흡착하고있는부품이사이드뷰의
시야각에들어오는지부품의크기도체크합니다 .
표리가반전된부품을인식한경우와시야각에들어오지않는부품을인식한경우는에러메시지를표시합니다 .
또한 ,상반부에리드가있는부품및측면에리드가없는부품은적용되지않습니다 .
n
요점
사이드뷰 기능의 각 파라미터 설정에 대해서는 「프로그래밍 매뉴얼」을 참조해 주십시오 .
1-56
1
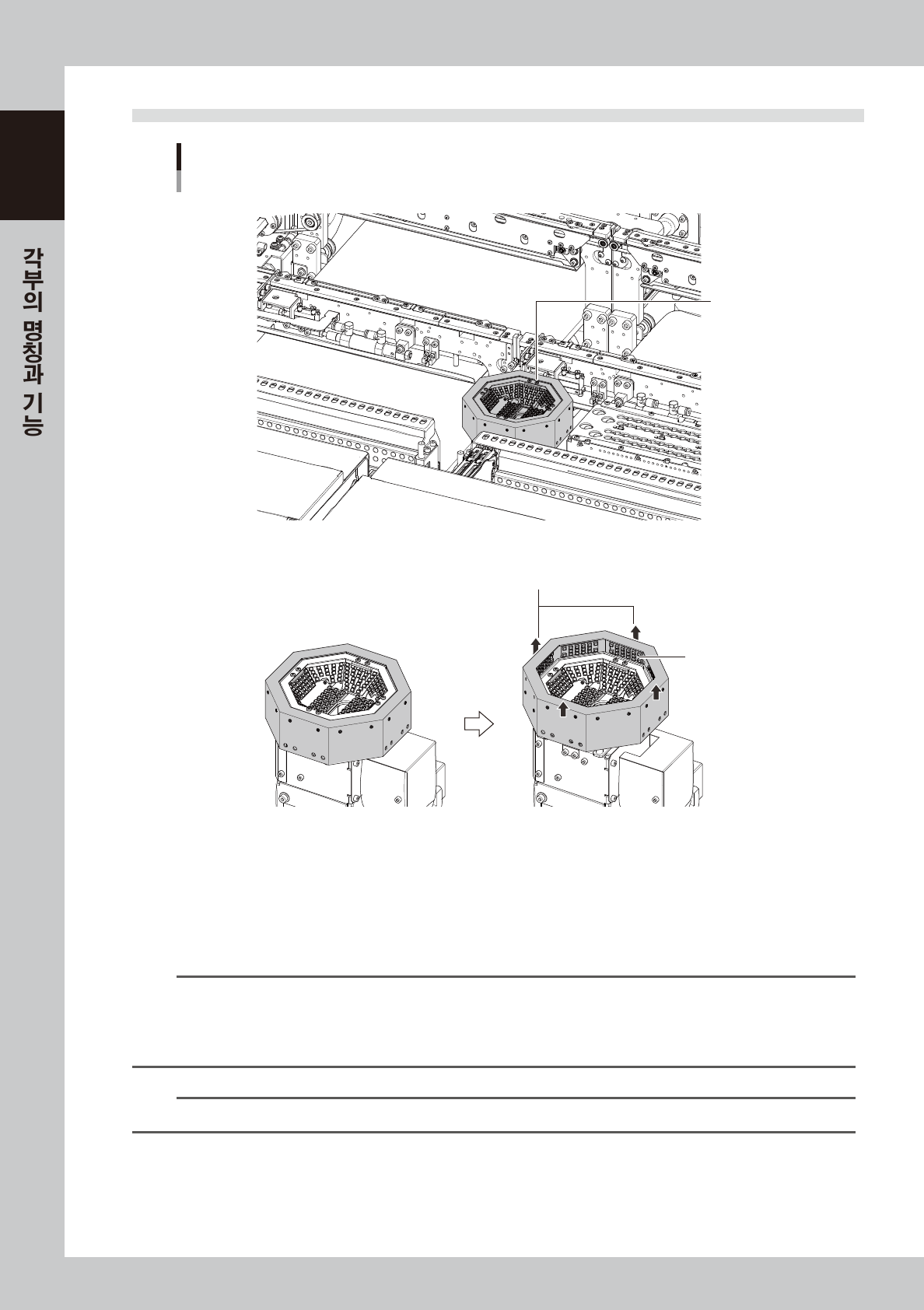
6.3 멀티 카메라
인식장치
멀티 카메라
사이드 조명
<멀티 카메라>
멀티 카메라의 외주 부분이 상승한다
<멀티 카메라 사이드뷰 조명>
27131-KMK-00
█ 멀티카메라 ( 옵션 )
FM 헤드유닛으로부품탑재를실행할경우또는 ,HM 헤드유닛의스캔카메라로인식할수없는사이즈의부품 ( 이하요점참조 )
을인식하기위한카메라로 ,헤드유닛의선택등장비의사양에맞춰서전후또는어느한쪽에설치합니다 .
또한 ,BGA,플립칩등 「사이드조명」 설정이되어있는부품을인식할때에는 ,멀티카메라의외주부분이상승하여부품의측면
에서조명을조사합니다 .
n
요점
스캔 카메라로 인식 가능한 최대 부품 크기는 다음과 같습니다 .
YSM20R TypePV : 가로 12mm 세로 12mm, 높이 6.5mm
YSM20R TypeSV : 가로 8mm 세로 8mm, 높이 6.5mm
YSM20WR : 가로 12mm 세로 12mm, 높이 6.5mm
n
요점
사이드 조명의 설정에 관한 상세한 내용은 「프로그래밍 매뉴얼」을 참조해 주십시오 .
1-57
1
7. 축 구성
축 구성 및 동작방향에 대해서 설명합니다 .
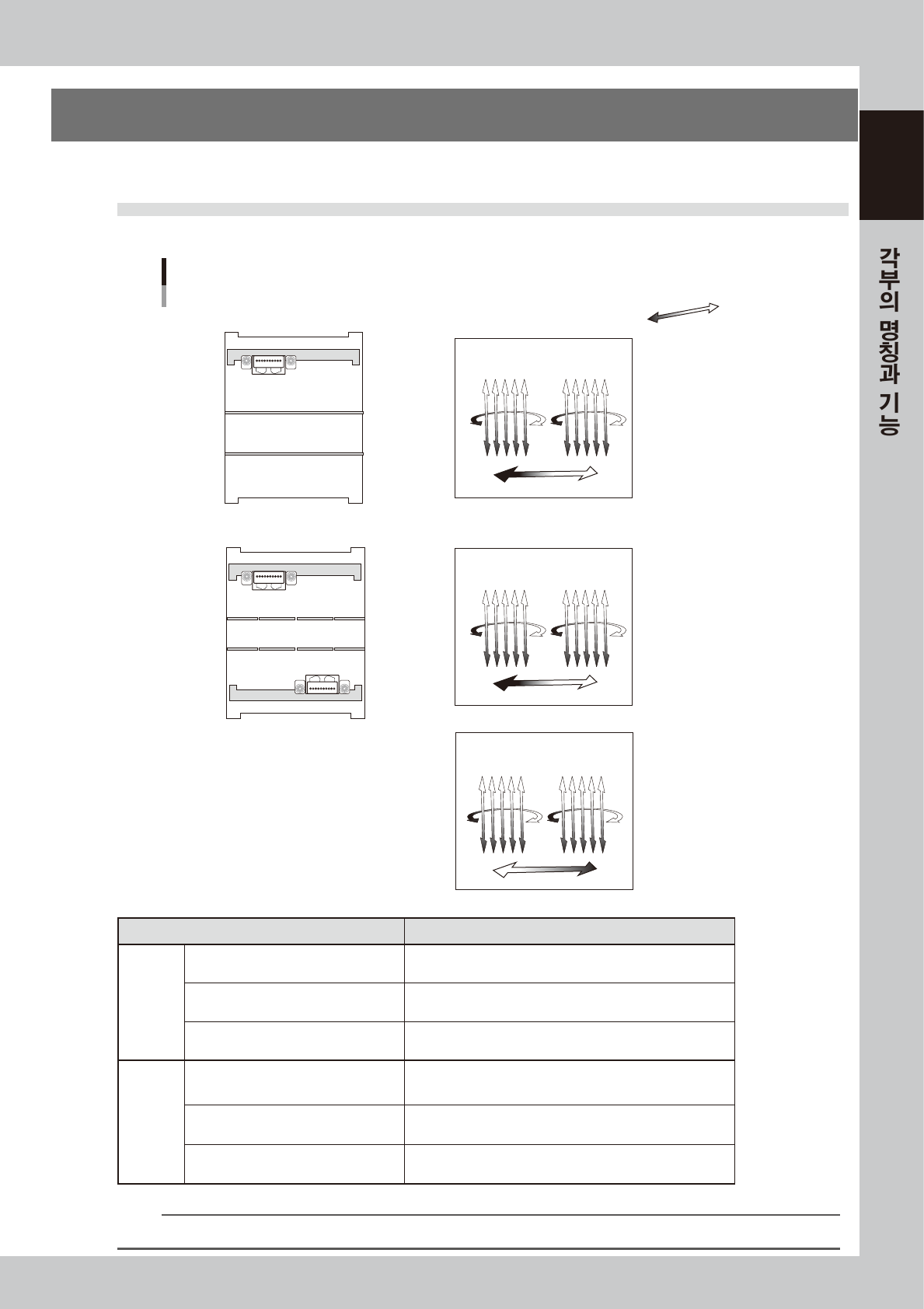
7.1 헤드유닛의 축 구성
█ HM 헤드유닛
10
1
1
10
1
10
헤드부의 축 구성 ( HM헤드 유닛)
장비의 정면에서 본 예
플러스 방향
마이너스 방향
RA1축
RB1축
RA2축
RB2축
SCB축
■ 2빔
SCA축
<A테이블 헤드유닛>
<B테이블 헤드유닛>
ZB1ZB10 ZB6 ZB5
RA1축
RA2축
SCA축
■ 1빔
<헤드유닛>
ZA1ZA10 ZA6 ZA5
ZA10ZA1 ZA5 ZA6
A테이블
B테이블
장비 정면
장비 정면
27132-KMK-00
축명칭 기능과역할
HM 헤드
1빔
ZA1 축→ Z A10 축
부품흡착
・
탑재헤드를상하로이동합니다 .
아래방향이플러스입니다 .
RA1 축→ RA2 축
RA1,RA2 의2 개의모터로노즐샤프트를5 개씩회전시킵니다.
시계반대방향이플러스입니다 .
SCA 축
스캔카메라를이동합니다 .
1 번헤드→10 번헤드쪽이플러스입니다 .
HM 헤드
2빔
ZA1 축→ Z A10 축 ,ZB1 축→ ZB10 축
부품흡착
・
탑재헤드를상하로이동합니다 .
아래방향이플러스입니다 .
RA1축→RA2축,RB1축→RB2축
RA(B)1,RA(B)2 의2 개의모터로노즐샤프트를5 개씩회전시
킵니다 .시계반대방향이플러스입니다 .
SCA,SCB 축
스캔카메라를이동합니다 .
1 번헤드→10 번헤드쪽이플러스입니다 .
n
요점
2 빔 사양의 장비는 , 앞쪽의 헤드유닛을「A 테이블」, 뒤쪽의 헤드유닛을 「B 테이블」이라고 합니다.