FlexTRAK 2MB Material Handler Addendum Rev 05.pdf - 第63页
FlexTRAK Series 2MB Mater ial Handler Adden dum System Compo nents © 2023 Nordson Corporation 4-19 4.3.2.2 Pneumatic Actuator The pneumatic actuator is the driving mechanism to open an d close the gripper. The arms are c…
FlexTRAK Series 2MB Material Handler Addendum System Components
4-18 © 2023 Nordson Corporation
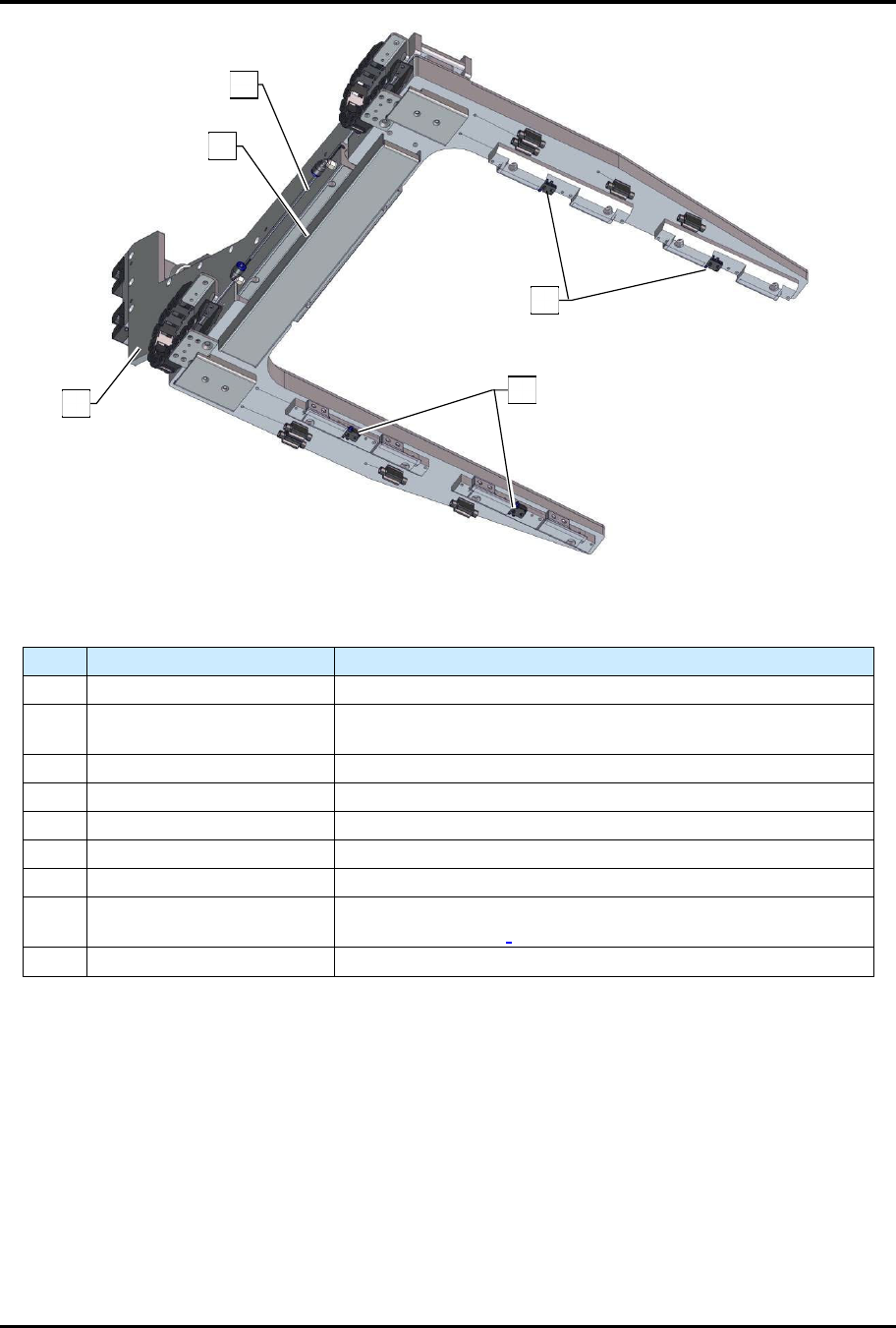
Figure 4-13 Gripper Assembly (Bottom View)
Table 4-6 Gripper Assembly Components
Item
Description
Function
1 Mounting Plate Quick disconnect for servicing.
2 Gripper Fingers
Allows the gripper to engage the workpiece, see 4.3.2.4
Gripper Fingers.
3 Leveling Screws Adjustment screws for leveling the gripper assembly.
4 Air Supply Input/Output Delivers low pressure air for actuation.
5 Open/Close Sensors Indicates gripper open/closed.
6 Actuator Cover Cover to enclose the actuator.
7 Pneumatic Actuator Opens and closes the gripper (partial view).
8 Detection Switches
Indicates part detection. Two switches per carrier, see 4.3.2.3
Detection Switches.
9 Ball Bearing Allows the gripper assembly to travel along the Y-axis.
Both assemblies are identical and mount independently via a cantilever arm to their respective drive axis.
The entire assemblies can be removed and replaced for servicing at the mounting plate. The arms will
disconnect, leaving the Y-axis ball bearing slides attached to the MH. Servicing is made easy by the use
of quick disconnects and pinned locations to ensure proper alignment for reattachment. Fine adjustments
can be made to level the assembly at installation using the three adjustable leveling screws. Each gripper
assembly should be leveled relative to the chamber electrode.
6
1
7
8
8

FlexTRAK Series 2MB Material Handler Addendum System Components
© 2023 Nordson Corporation 4-19
4.3.2.2 Pneumatic Actuator
The pneumatic actuator is the driving mechanism to open and close the gripper. The arms are coupled to a
ball bearing slide and are linked via a mechanical bracket located under the gripper’s actuator cover. This
linkage is a factory-controlled dimension that determines the open and closing position of the assembly.
Open/close sensors indicate that a full stroke has been achieved. The actuator’s air supply is controlled
via the MH transfer system regulator and the MH gripper exhaust backpressure regulator.
The MH transfer system regulator's air supply should be set to 52 psi, and the backpressure regulator
should be set to 30 psi. The resulting gripper pressure is 22 psi, which limits and controls the amount of
force the gripper can apply to the workpiece as well as providing safe operating conditions.
There are two gripper configurations: single and dual solenoid. Figure 4-14 shows the top view of a
single-solenoid gripper assembly with the pneumatic actuator cover on. Figure 4-15 shows a
dual-solenoid gripper assembly with the cover removed to illustrate the dual-solenoid configuration.
Figure 4-14 Single-Solenoid Gripper Assembly
Figure 4-15 Dual-Solenoid Gripper Assembly with Pneumatic Actuator Cover Removed
FlexTRAK Series 2MB Material Handler Addendum System Components
4-20 © 2023 Nordson Corporation
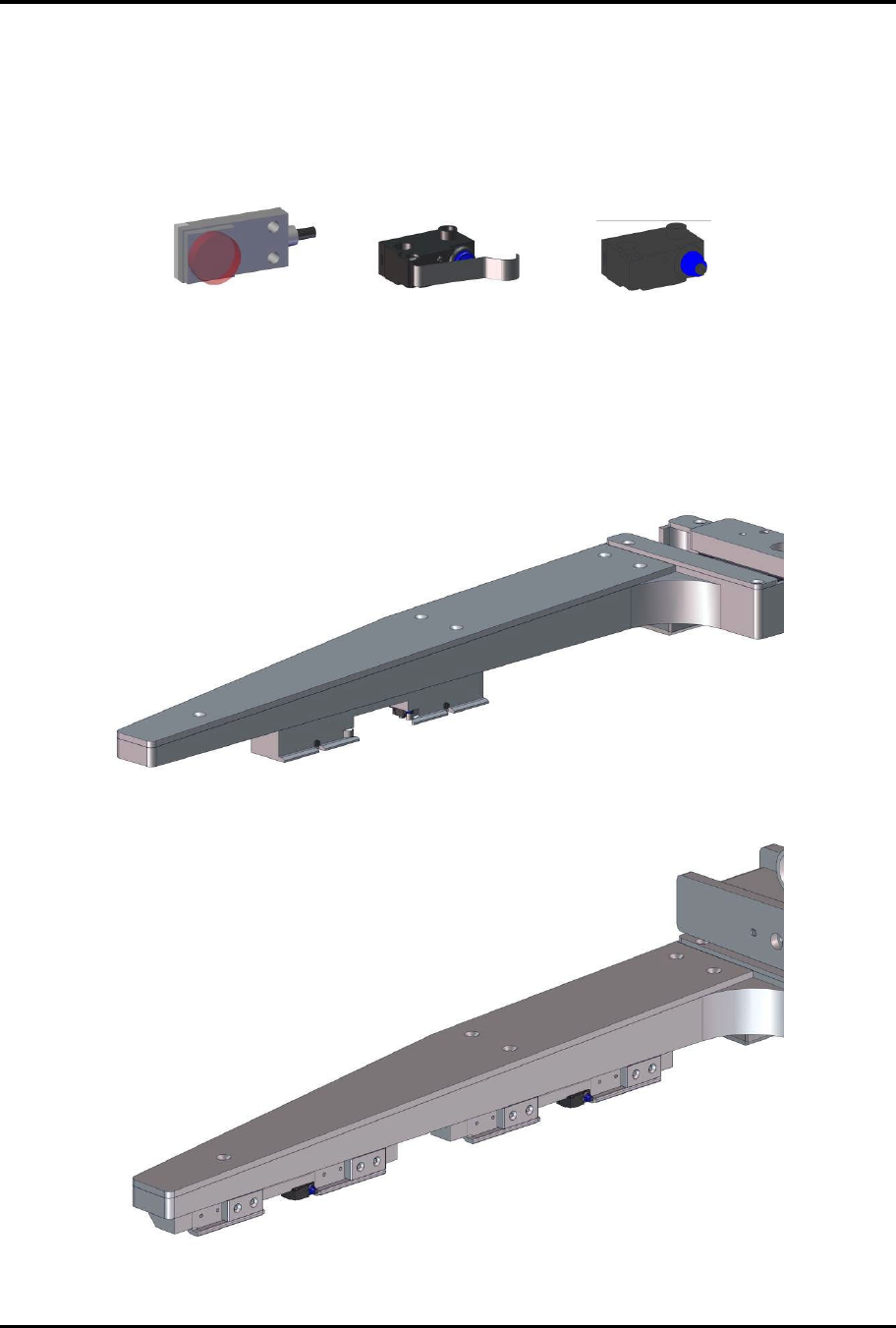
4.3.2.3 Detection Switches
Each gripper assembly arm includes a detection switch for each lane (Figure 4-16 shows standard switch
options). These switches determine if carriers are present within the gripper assemblies. They must sense
the carrier’s edge on both sides of the workpiece at all times while gripped. Any loss of signal from one
of the switches will prompt a MH process carrier detection alarm, see 9.5 Material Handling Alarms.
Figure 4-16 Detection Switch Types
4.3.2.4 Gripper Fingers
The gripper fingers engage and secure the workpiece for transport. Since these fingers are susceptible to
wear, follow the factory recommendation for inspection and replacement, see 8.4.1 Removing the Gripper
Assemblies. The gripper fingers are available in various sizes, designed to fit multiple process carriers
(Figure 4-17 through Figure 4-19).
Figure 4-17 Gripper Arm and Fingers with Detection Switches for Small Process Carriers
Figure 4-18 Gripper Arm and Fingers with Detection Switches for Medium Process Carriers