00196043-05 - SG X und X4I FSE_de.pdf - 第104页
Kommunikation und Steuerung Kommunikation DP-Antriebe, C&P20A- und CPP-Kopf CAN-Bus Student Guide SIPLACE X-Serie und X4I FSE 104 Zeitlicher Ablauf von Oben na ch Unten der Kommunikati on Bildauf nahme Kommunikation …
Kommunikation und Steuerung
CAN-Bus Kommunikation SIPLACE Vision
103 Student Guide SIPLACE X-Serie und X4I FSE
Kommunikation SI PLACE Vision
4.3.6 Kommunikation SIPLACE Vision
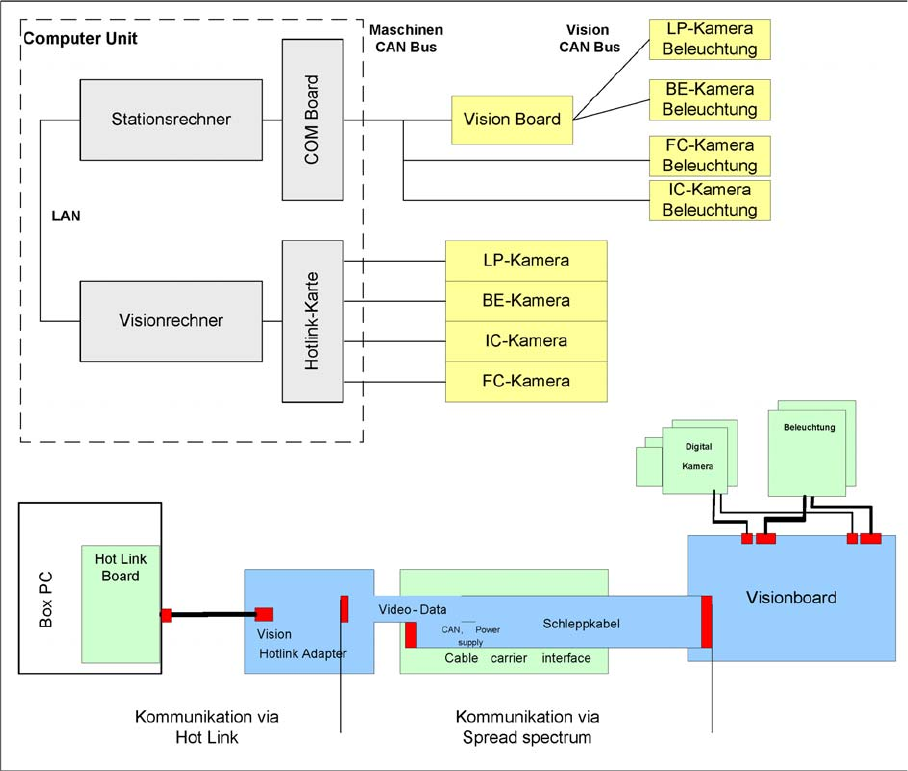
Überblick SIPLACE Vision
Die Kommunikation zwischen den einzelnen Rechnern erfolgt über LAN-Kabel, wobei der
Stationsrechner das Kommando zur Bildaufnahme an den Visionrechner sendet und das Resultat der
Messung empfängt. Weiterhin schickt der Stationsrechner die Beleuchtungswerte der entsprechenden
Gehäuseformen. Die aufgenommenen Bilder werden digital über das Visionboard zum Hotlink-Adapter
via Spread-Spektrum übertragen und dann über die Hotlink-Verbindung zum Visionrechner geschickt
und ausgewertet. Das Ergebnis wird zum Stationsrechner gesendet.
Kommunik ation während einer Bildaufn ahme
4.3.6.1 Kommunikation während einer Bildaufnahme
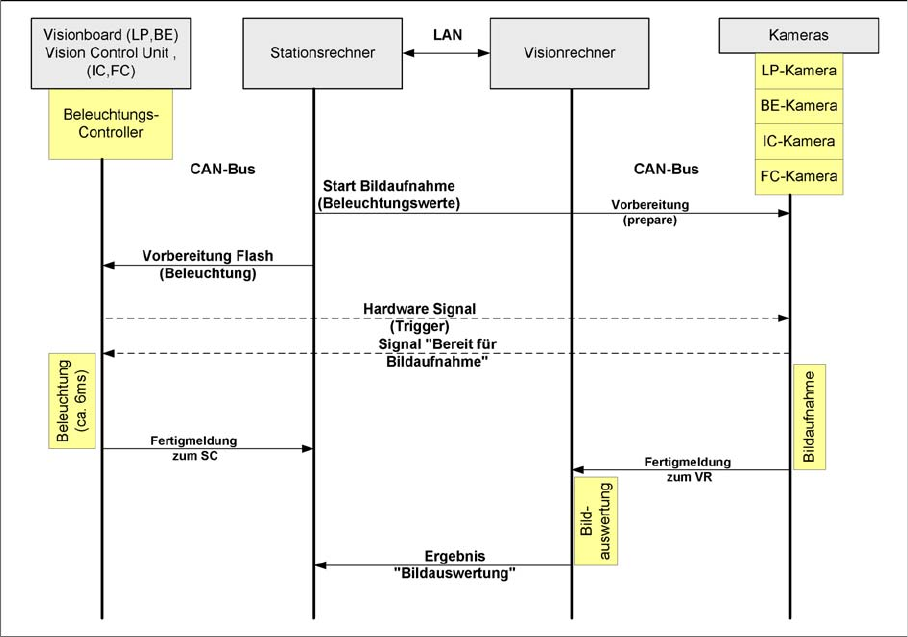
Die wichtigste Kommunikation zwischen dem Visionsystem und dem Stationsrechner ist die
Übertragung der Beleuchtungswerte. Diese im GF gespeicherten Werte werden über den CAN-Bus an
die betreffende Kamera geschickt. Soll die Kamera das Bild aufnehmen, wird die Kamera durch einen
Trigger aktiviert. Ab diesem Moment leuchten die jeweiligen LED-Reihen der verschiedenen
Beleuchtungsstufen, abhängig vom Beleuchtungswert. Dieser kann die Werte 0 = dunkel bis 255 = hell
annehmen. Alle Beleuchtungsstufen beginnen im gleichen Augenblick zu leuchten. Der Wert 0-255
bestimmt die Dauer der Beleuchtungszeit.
Die maximale Dauer der Beleuchtung ist beschränkt auf 6 ms.
Kommunikation und Steuerung
Kommunikation DP-Antriebe, C&P20A- und CPP-Kopf CAN-Bus
Student Guide SIPLACE X-Serie und X4I FSE 104
Zeitlicher Ablauf von Oben nach Unten der Kommunikation Bildaufnahme
Kommunikation DP-Antriebe, C&P 20A- und CPP-Kopf
4.3.7 Kommunikation DP-Antriebe, C&P20A- und CPP-Kopf
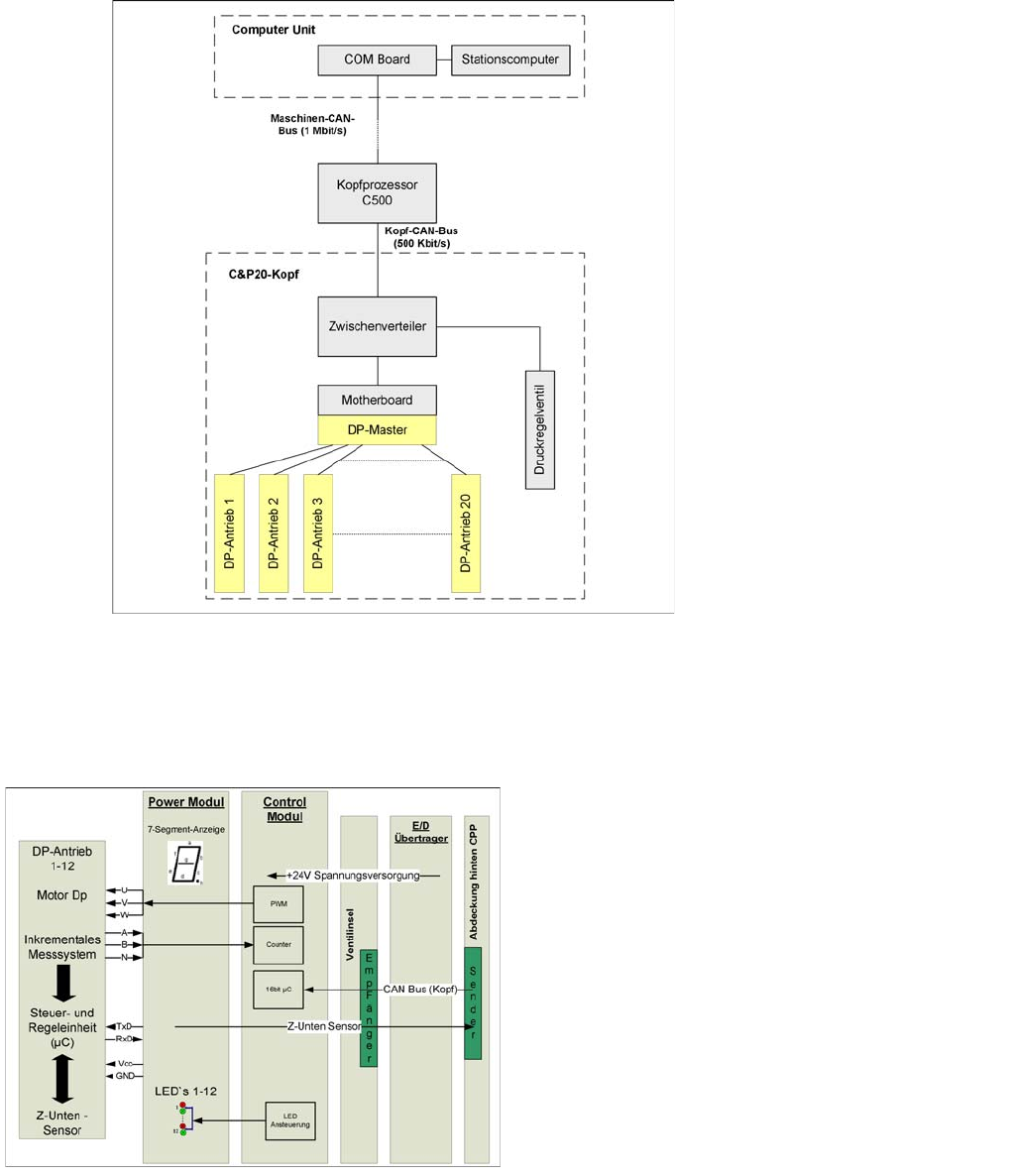
Das TQM–Modul auf dem Kopfinterface C500 kommuniziert über den CAN-Bus (1 MBit/s) zum
Stationsrechner.
Die Kommunikation zum C&P20A- bzw. CPP-Kopf läuft über einen zusätzlichen CAN-Bus, der mit
500 KBit/s die Daten überträgt.
Die DP-Achsen werden über den DP-Master (SCS) angesteuert. Dabei werden quasi gleichzeitig von
der Maschinensteuerung 4 Aktionen ausgeführt:
▪ Start einer bestimmten Drehachse nach Abholen/Bestücken (Abholwinkel/Bestückwinkel)
▪ Start einer bestimmten Drehachse nach Vision (Korrekturwinkel)
▪ Warten auf eine bestimmten Drehachse vor Vision (Positionierkommando nicht erlaubt)
▪ Warten auf eine bestimmten Drehachse vor Abholen/Bestücken (Positionierkommando nicht
erlaubt)
Kommunikation und Steuerung
CAN-Bus Kommunikation CPP-Kopf
105 Student Guide SIPLACE X-Serie und X4I FSE
CAN-Bus gesteuerte Kopffunktionen am C&P20A-Kopf
Kommunikation CPP-Kopf
4.3.8 Kommunikation CPP-Kopf
Kommunik ation zu den DP-Antrieben
4.3.8.1 Kommunikation zu den DP-Antrieben
Die Regelung der DP-Antriebe erfolgt über eine
gemeinsame Hardware, die SCS (Single Core Solution).
Diese besteht aus zwei Platinen, dem Power- und dem
Control-Modul mit einem Mikroprozessor für die
Ablaufsteuerung.
Die Steuerungs- und Regelungsdaten kommen vom
Kopfprozessor und werden über den Kopf-CAN-Bus
übertragen.
Die Kommunikation mit der Lichtschranke Z_unten
erfolgt über eine eigene Schnittstelle direkt zum Power-
Modul. Dies ist notwendig, da in jedem Segment eine
Lichtschranke Z_unten integriert ist.