00196043-05 - SG X und X4I FSE_de.pdf - 第72页
Überblick CPP-Kopf Übersicht Komponenten Student Guide SIPLACE X-Serie und X4I FSE 72 Übersich t der Funktionen 3.2.10.2 Übersicht der Funktionen Sternstation 1: ▪ Abholen, Bestücken oder Abwer fen des Bauelements ▪ BE-S…
Überblick
Übersicht Komponenten CPP-Kopf
71 Student Guide SIPLACE X-Serie und X4I FSE
CPP-Kopf
3.2.10 CPP-Kopf
Übersicht
3.2.10.1 Übersicht
Technische Daten
Technische Daten
Ein Mixed-Modus zwischen Collect&Place und Pick&Place ist möglich.
CPP-Kopf Übersicht
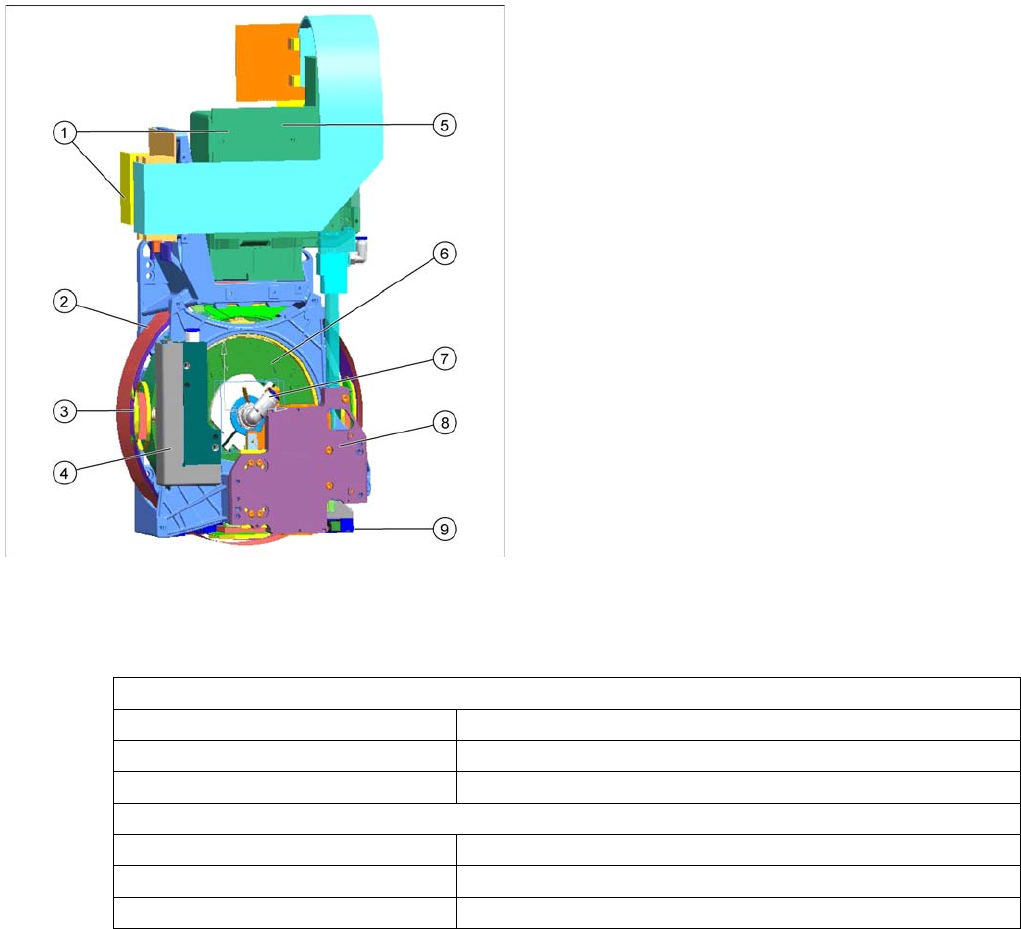
CPP-Bestückkopf ohne Kamera [03053528-xx]
CPP-Bestückkopf mit Kamera SST29 [03053528-xx]
Legende
1. Zwischenverteiler 1 und 2
2. Sternmotor (im Kopfgehäuse integriert)
3. DP-Achse (als Direktantrieb)
4. Druckregelventil
5. BE-Kamera (hinter dem Zwischenverteiler, Standard:
SST29)
6. Single-Core-Solution (SCS) – Ansteuerung
DP-Antriebe
7. Haltekreisversorgung, eingebaute Venturidüsen und
Ventilschaltbaugruppe (Ventilinsel)
8. Z-Achse mit Rückholzylinder
9. BE-Sensor in der Bestück- und Abholposition
Im Collect&Place-Modus
Bauelemente-Spektrum 01005 bis 27x27 mm, bis zu 8,5 mm Höhe
Geschwindigkeit bis zu 24.000 BE/h
X/Y-Genauigkeit +/- 55 μm bei 4 Sigma
Im Pick&Place-Modus
Bauelemente-Spektrum 01005 bis 50x40 mm, bis zu 11,5 mm Höhe
Geschwindigkeit bis zu 1.500 BE/h
X/Y-Genauigkeit +/- 45 μm bei 4 Sigma
Überblick
CPP-Kopf Übersicht Komponenten
Student Guide SIPLACE X-Serie und X4I FSE 72
Übersich t der Funktionen
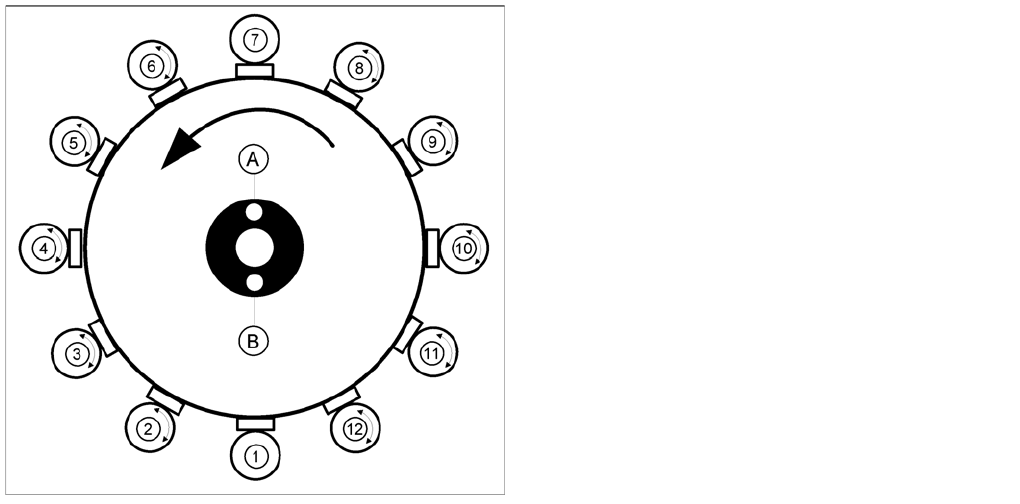
3.2.10.2 Übersicht der Funktionen
Sternstation 1:
▪ Abholen, Bestücken oder Abwerfen des Bauelements
▪ BE-Sensor: Hier wird überprüft, ob das Bauelement nach dem Abholen und vor dem Bestücken
vorhanden ist.
▪ BE-Sensor: Hier wird überprüft, ob kein Bauelement vor dem Abholen und nach dem Bestücken
vorhanden ist.
▪ Vakuum- und Blasluftmessung im Bestück-/Abholkreis
Sternstation 7:
▪ Optische Messung der Bauelemente
▪ Vakuummessung des Haltekreises: Durch das Drehen der Sternachse kann an jedem Segment der
Vakuumwert gemessen werden.
Sternstation 2 - 6
▪ In diesen Sternstationen kann das Bauteil an dem Segment in die programmierte Bestücklage
vorzentriert werden.
Sternstation 8 -12
▪ In den Sternstationen 8 - 12 erfolgt die Winkelkorrektur nach der optischen Messung.
Sternstation 2- 6 und 8 - 12
▪ Das Drehen der Pipette in die richtige Abhollage kann in allen Sternstationen außer 1 und 7 erfolgen.
Beschreibung
3.2.10.3 Beschreibung
Der CPP-Kopf kann in verschiedenen Bestückmodi arbeiten. Standardmäßig arbeitet der CPP Kopf im
Collect&Place-Modus. Dieser ist bis zu einer Bauteilgröße von 27 mm x 27 mm möglich. Die zwei
zusätzlichen Bestückmodi Mixed-Mode für mittlere Bauelemente (bis 32 mm x 32 mm) und der
Pick&Place-Modus für große Bauteile (bis 50 mm x 40 mm) erweitern das Bauteilspektrum erheblich.
Legende
▪ A: Vakuummessung Haltekreis
▪ B: Vakuummessung Bestück- und Abholkreis
▪ 1-12: Sternstationen 1 bis 12
Überblick
Übersicht Komponenten CPP-Kopf
73 Student Guide SIPLACE X-Serie und X4I FSE
Abhängig vom Bauteilespektrum werden max. zwölf Bauelemente aus den Zuführmodulen (X-Förderer)
abgeholt.
Der BE-Sensor überprüft in der Bestück-/Abholposition, ob ein Bauelement von der Pipette
aufgenommen wurde bzw. ob das Bauteil bestückt wurde. Auf dem Weg zur Bestückposition werden die
Bauelemente in ihre Bestücklage gedreht und optisch zentriert. Dies geschieht mit der digitalen
Bauelementekamera am Kopf bzw. bei mittleren und großen Bauelementen über eine stationäre
Kamera. Vor dem Bestücken der Bauelemente erfolgt die vom Visionsystem ermittelte Winkel- und X/Y-
Lage-Korrektur. Die X/Y-Lage-Korrektur wird in die Bestückposition eingerechnet und die
Winkelkorrektur erfolgt separat an jedem Segment. Dies ist möglich, da sich jedes Segment unabhängig
von der Sternposition drehen kann. Danach werden die Bauelemente mit Hilfe von Blasluft sanft und
positionsgenau auf der Leiterplatte abgesetzt.
Besonderheiten:
▪ Jedes Segment besitzt einen eigenen DP-Antrieb, um die Bauteile in die richtige Lage zu drehen.
Die Segmente werden deshalb nicht mehr an einer einzigen Sternposition in die richtige Winkellage
gedreht, sondern können unabhängig voneinander gedreht werden.
▪ Jedes Segment verfügt über einen eigenen Vakuumerzeuger.
▪ Über eine so genannte Ventilinsel kann der Versorgungsdruck der einzelnen Venturidüsen für jedes
Segment an- und abgeschaltet werden. Dadurch verringert sich der Druckluftverbrauch um 40-50%.
▪ Zusätzlich befindet sich in jedem DP-Antrieb die Lichtschranke Z_unten. Bei der Auf- und
Abwärtsbewegung der Z-Achse gibt es kein bewegtes Kabel.
▪ Der Z-Antrieb der Segmente ist mit einem Linearmotor mit linearem Wegmesssystem realisiert. Hier
ist jetzt das Sekundärteil in der Z-Achse integriert Bei der Auf- und Abwärtsbewegung der Z-Achse
gibt es kein bewegtes Kabel.
Pipettenwechsler (PPW)
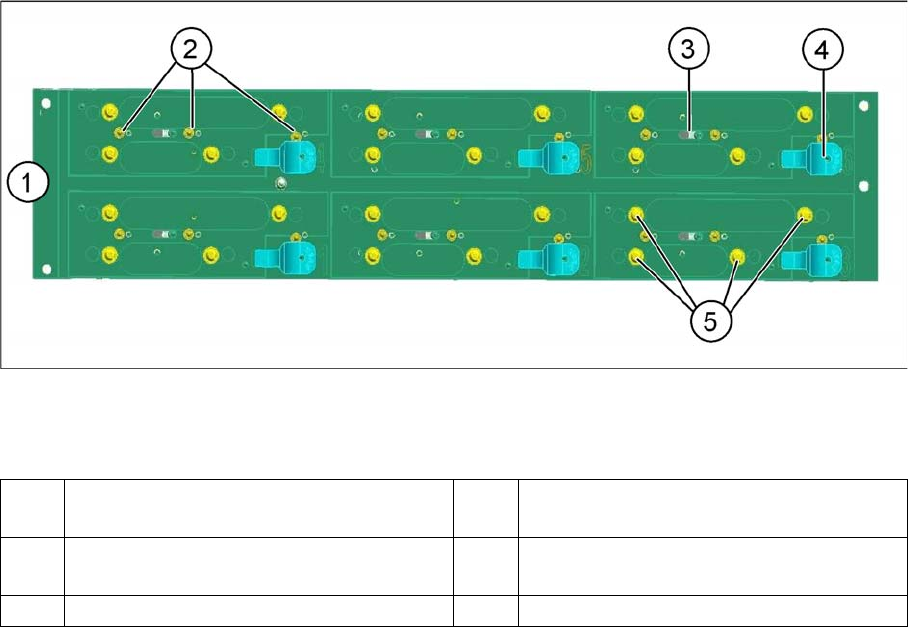
3.2.10.4 Pipettenwechsler (PPW)
Pipettenwechsler X-Maschine
Legende
▪ Bei der X-Serie sind je nach Maschinenkonfiguration max. zwei Pipettenwechsler mit insgesamt 12
Magazinen pro Stellplatz möglich.
(1) Pipettenwechsler-Träger (2) Mikroschalter 1, 2 und 3 für die
Magazinabfrage
(3) Betätiger zum Öffnen und Schließen der
PPW-Magazine
(4) Entriegelungshebel für die PPW-Magazine
(5) Befestigungsclips für die PPW-Magazine