00196043-05 - SG X und X4I FSE_de.pdf - 第526页
MTC2 Baugruppen der Steuerung Aufbau und Wirkungsweise Student Guide SIPLACE X-Serie und X4I FSE 526 ► Führen Sie einen Refe renzlauf der SIPLACE-Station durch. ► Machen Sie einen Funktionstest der Sch utzeinrichtung en,…

MTC2
Aufbau und Wirkungsweise Inbetriebnahme
525 Student Guide SIPLACE X-Serie und X4I FSE
Jede Achse fährt erst ihre physikalische Homelage an, überprüft dann die Lage der beiden Software
Endschalter und stoppt schließlich in der Software-Nullposition (entspricht dem jeweiligen Null-Offset
von der physikalischen Homelage). Diese dann eingenommenen Positionen sind als Referenz- bzw. als
Einmesspositionen definiert.
Im Detail läuft die Referenzfahrt für eine einzelne Achse folgendermaßen ab:
▪ Der aktuelle Null-Offset wird an den Masterdrive gesendet.
▪ Die Steuerung frägt die Lichtschranke "Ruheposition" ab und wartet auf eine steigende Flanke.
▪ Steht die Achse bereits in der Lichtschranke, dann liefert diese ein "HIGH-Signal". Die Achse fährt
in positiver Richtung solange, bis die Lichtschranke eine fallende Flanke liefert. Anschließend fährt
die Achse wieder in negativer Richtung.
▪ Steht die Achse nicht in der Lichtschranke, dann liefert diese ein "LOW-Signal". Die Achse fährt in
negativer Richtung.
▪ Die Achse fährt solange in negativer Richtung, bis die Lichtschranke die benötigte steigende Flanke
geliefert hat und die erste Rotor-Nullage (Index) gefunden worden ist.
▪ Diese Vorgehensweise ist notwendig, da die Nullimpulse der Resolver-Winkelschrittgeber sich bei
jeder Umdrehung wiederholen und deshalb mehrmals innerhalb des möglichen Verfahrbereiches
erscheinen.
▪ Beide Software Endschalter der maximalen und minimalen Position werden bis auf wenige
Millimeter angefahren, um die gespeicherten Daten zu überprüfen.
▪ Zuletzt wird der aktuelle Null-Offset angefahren.
Sind alle vier Referenzpositionen angefahren, sucht die SIPLACE-Station auf den Zuführachsen die
beiden Referenzmarken. Die gefundene Position wird später zur Bestimmung der Abholposition von
Bauelementen verwendet. Die Marken müssen in der MVS-Datei des Linienrechners vorhanden sein.
Inbetriebnahme
14.2.4 Inbetriebnahme
Der MTC2 kann nicht als eigenständige Maschine betrieben werden, sondern nur zusammen mit einer
SIPLACE-Station. Die Einstellungen (Maschinendaten) werden im batteriegepufferten Speicher des
Maschinencontrollers gespeichert und sind jeweils nur für diese eine Maschine gültig.
Nach der Anlieferung des MTC2 müssen vor der ersten Inbetriebnahme folgende Schritte durchgeführt
werden:
► Kontrollieren Sie die Grundhöhe und stellen Sie diese ggf. ein (siehe Betriebsanleitung).
► Prüfen Sie, ob die Spannungsversorgung korrekt eingestellt ist (siehe Einstellanleitung").
► Kontrollieren Sie, ob die Bewegungsfreiheit aller Achsen gewährleistet ist.
► Kontrollieren Sie den Zahnriemen auf Spannung und Beschädigung: siehe Einstellanleitung
► Bei offensichtlicher Beschädigung des Zahnriemens ist dieser auszutauschen (siehe
Serviceanleitung).
► Bereiten Sie die SIPLACE-Station vor (siehe Umbauanleitung).
► Docken Sie den MTC2 an der SIPLACE-Station an (siehe Betriebsanleitung).
► Schalten Sie den MTC2 und die SIPLACE-Station ein.
► Loggen Sie sich in der Stationsrechner-Software als Service ein.
► Starten Sie SITEST.
► Wechseln auf der Grundansicht in das Menü für den MTC2.
► Führen Sie einen Referenzlauf des MTC2 durch.
VORSICHT
Wenn das Anfahren der Software Endschalter nicht vollständig durchgeführt wird und am
Bildschirm eine Fehlermeldung der Motorsteuerungen (Masterdrive) erscheint, muss eine der
Achsen neu eingemessen werden
MTC2
Baugruppen der Steuerung Aufbau und Wirkungsweise
Student Guide SIPLACE X-Serie und X4I FSE 526
► Führen Sie einen Referenzlauf der SIPLACE-Station durch.
► Machen Sie einen Funktionstest der Schutzeinrichtungen, indem Sie während weiterer
Referenzläufe jede der folgenden Aktionen einzeln durchführen:
► Drücken Sie den NOT-HALT-Taster.
► Öffnen Sie die Schutztüren.
► Lassen Sie vor dem Referenzlauf die Turmverriegelungen offen.
Es muss jeweils ein NOT-HALT erfolgen und eine entsprechende Fehlermeldung auf dem Bildschirm
ausgegeben werden.
► Machen Sie die jeweilige Aktion rückgängig und quittieren Sie die Fehlermeldung.
Baugrupp en der Steuerung
14.2.5 Baugruppen der Steuerung
C167-Controllerboard
14.2.5.1 C167-Controllerboard
Das Steuerungsprogramm (Firmware) auf dem C167-Controllerboard ist in einem Flash-EPROM
gespeichert. Die Versions-Nr. kann über das SITEST-Programm abgefragt werden.
Die Maschinendaten und die Rüstung sind in einem RAM-Speicher gespeichert. Nach Abschalten der
Maschine werden die Daten durch eine Pufferbatterie (Pufferzeit ca. 3,5 Jahre) gehalten, die sich
ebenfalls auf dem C167-Controllerboard befindet. Zusätzlich ist ein Elektrolyt-Kondensator ("Goldcap")
mit der Kapazität von 1 F vorhanden, der die Daten für ca. 8 h beim Austauschen der Pufferbatterie
sichert.
Die Lichtschranken "Ruheposition" und die Software Endschalter sind auf die Masterdrives verdrahtet
und werden dort über CAN-Bus der Steuerung zur Verfügung gestellt.
Aufgaben:
▪ Kommunikation mit dem Stationsrechner der SIPLACE-Station
▪ Maschinensteuerung über die Firmware
▪ Datenaustausch mit den Achsansteuerungen
▪ Speichern der Firmware (Flash-EPROM)
▪ Speichern der Maschinendaten und der Rüstung (batteriegepuffertes RAM)
▪ Speichern von maschinenspezifischen Parametern wie z. B. Seriennummer (im EEPROM)
Baugruppen der Steuerung
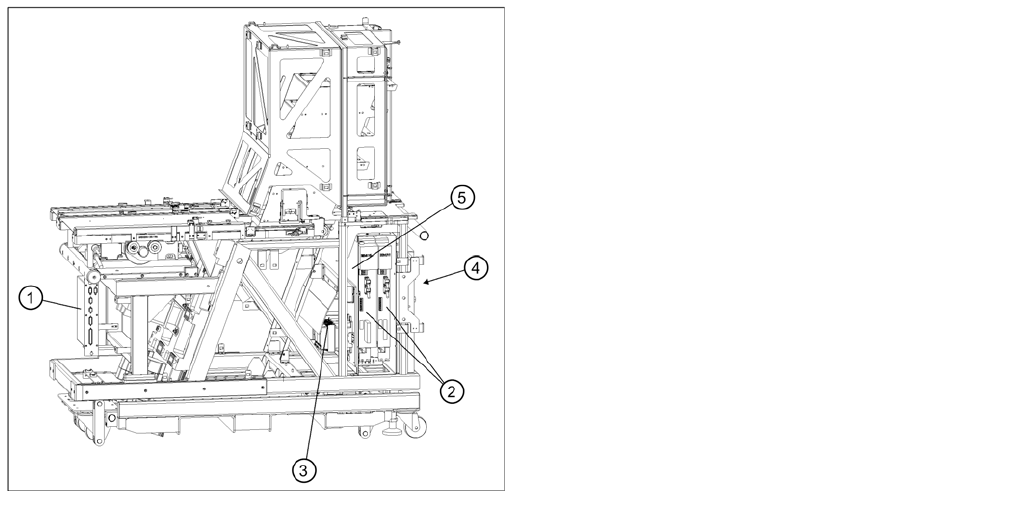
Legende
1. C167-Controllerboard
2. Masterdrives (hier Turm 1)
3. 24 V-Netzteil (hinter den Sicherheitskombinationen)
4. Elektroplatte
5. Montageplatte
MTC2
Aufbau und Wirkungsweise Baugruppen der Steuerung
527 Student Guide SIPLACE X-Serie und X4I FSE
▪ Bereitstellung einer Echtzeituhr (Realtime Clock)
▪ Eingänge für Sensoren
▪ Anzeige von Betriebs- und Störzuständen über LEDs
zwei RS232-Schnittstellen (maximale Übertragungsrate: 115,2 KBaud/s)
▪ COM 1: Testschnittstelle für Debugging-Service
▪ COM 2: frei
zwei CAN-Bus-Schnittstellen (maximale Übertragungsrate: 1 MBaud/s)
▪ CAN 1: Kommunikation mit der SIPLACE-Station
▪ CAN 2: Ansteuerung der 4 Masterdrives
Spannungsversorgung: 24 VDC
▪ Stromaufnahme: 500 mA
24 Eingänge über einen 37-poligen SUB-D-Stecker für die Sensoren
8 Ausgänge über einen 15-poligen SUB-D-Stecker für die Aktoren;
▪ die Ausgänge sind kurzschlussfest;
▪ Strom pro Ausgang: 0,7 A, kurzzeitig bis 2,5 A
Masterd rives
14.2.5.2 Masterdrives
Die Ansteuerung erfolgt über das interne CAN-Bus-System zwischen Mikrocontroller und Masterdrives.
▪ Ansteuerung der Halte-Bremsen für die Hubachsen
▪ Ansteuerung der Bremswiderstände der Hubachsen
▪ Ansteuerung der permanenterregten Synchronmotoren der Hub- und Zuführachsen
▪ Resolver-Auswertung
24 V-Netzteil
14.2.5.3 24 V-Netzteil
Das 24 V-Netzteil versorgt
▪ das C167-Controllerboard
▪ die Logik der Masterdrives
▪ die Sensoren und Aktoren
Elektroplatte
14.2.5.4 Elektroplatte
Elektroplatte mit folgenden Komponenten:
▪ Hauptschalter: S01
▪ NOT-HALT-Taster: S15
▪ Sicherungsautomaten:
– F00 Hauptsicherung
– F01 24 V Sensoren 1
– F02 24 V Sensoren 2, Masterdrive Steuerspannung
▪ Motorschutzschalter: Q01 Masterdrives
▪ Schütze:
– K01.1 Masterdrive Hubachse Turm 1
– K01.2 Masterdrive Zuführachse Turm 1
– K02.1 Masterdrive Hubachse Turm 2
– K02.2 Masterdrive Zuführachse Turm 2
▪ Optokoppler:
– U09 Bremse Turm 1
– U06 Bremse Turm 2