00196043-05 - SG X und X4I FSE_de.pdf - 第89页
Kommunikation und Steuerung CAN-Bus Allgemeiner Aufbau 89 Student Guide SIPLACE X-Serie und X4I FSE Kommunikation über den CAN-Bus Allgemeine r Aufbau 4.3.1 Allgemeiner Aufbau Sehen Sie dazu auch... 4.3.2 CAN-Bus -Prot…
Kommunikation und Steuerung
Kontrolle der Netzwerk-Adressen CAN-Bus
Student Guide SIPLACE X-Serie und X4I FSE 88
CAN-Bus
4.3 CAN-Bus
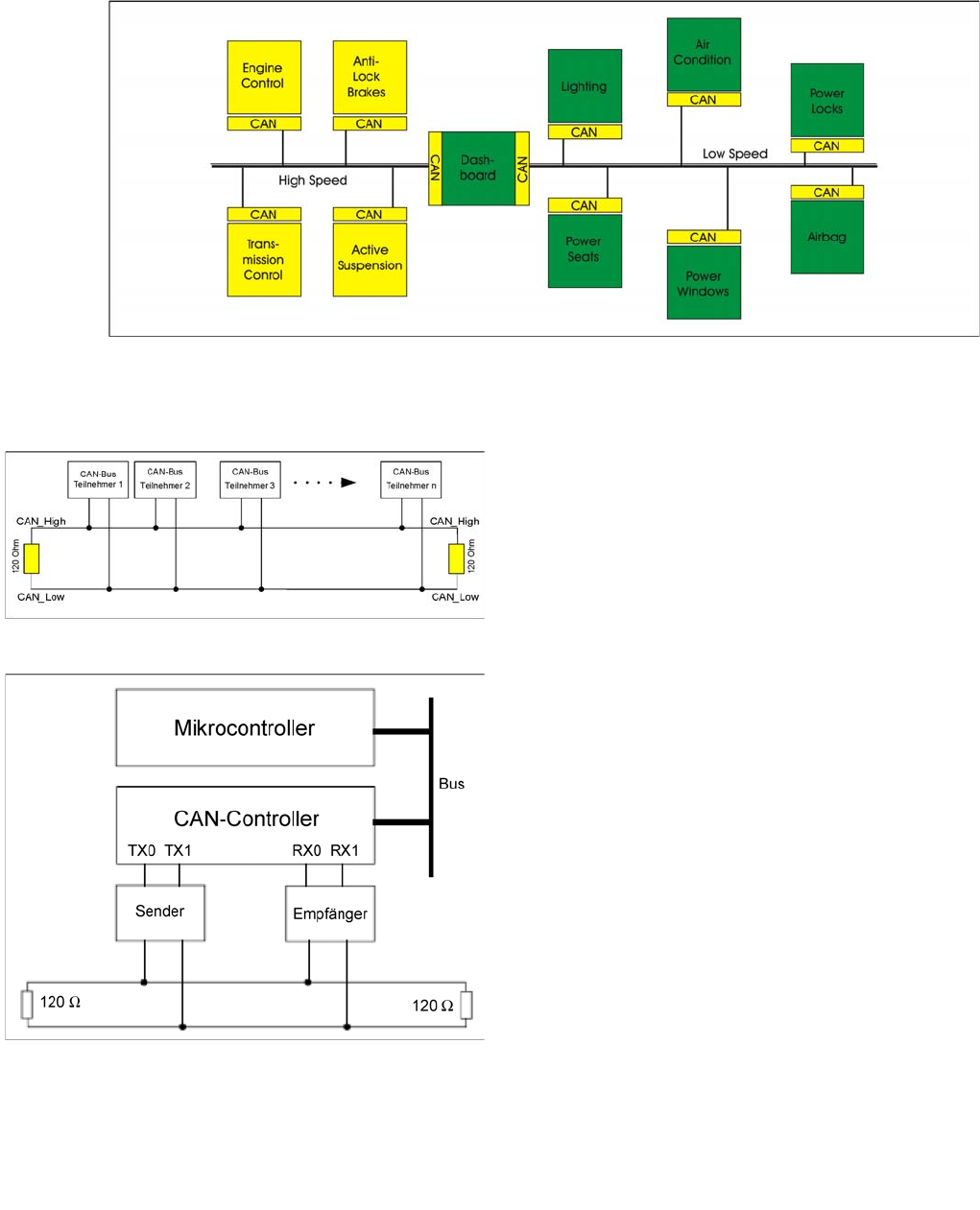
Die Entwicklung von Controller Area Network begann als moderne Fahrzeuge mehr und mehr
elektronisch gesteuert, überwacht und mit "elektronischem Komfort" ausgestattet wurden. Beispiele sind
Motormanagement, aktive Regelung wie z. B. ABS, Schaltkontrolle, Beleuchtungssteuerung, Lüftung,
Klimaanlage und Zentralverriegelung.
Kommunikation über Kabelverbindungen
Um das Fahrzeugverhalten weiterzuentwickeln war es nötig, dass die verschiedenen Steuerungs-
systeme und deren Sensoren Informationen austauschen. Dies wurde ursprünglich mit einer Punkt zu
Punkt Verdrahtung der Einzelkomponenten ausgeführt. Diese Notwendigkeit erhöhte Kabelbaumlängen
auf Kilometer und ebenfalls die Steckerzahlen. Außerdem erhöhte sich die Produktionszeit bei
gleichzeitiger Verringerung der Zuverlässigkeit.
Die Lösung dieses Problems ist die serielle Busverbindung der Einzelkomponenten. Dieses Bussystem
muss verschiedene, speziell aus der Fahrzeugtechnik stammende Notwendigkeiten erfüllen. Die Punkt
zu Punkt Verdrahtung wird durch den weniger aufwendigen CAN-Bus ersetzt. Jedes Modul erhält eine
CAN-Bus Anschaltung. Diese stellt alle Busprotokoll- und Übertragungsregeln sicher.
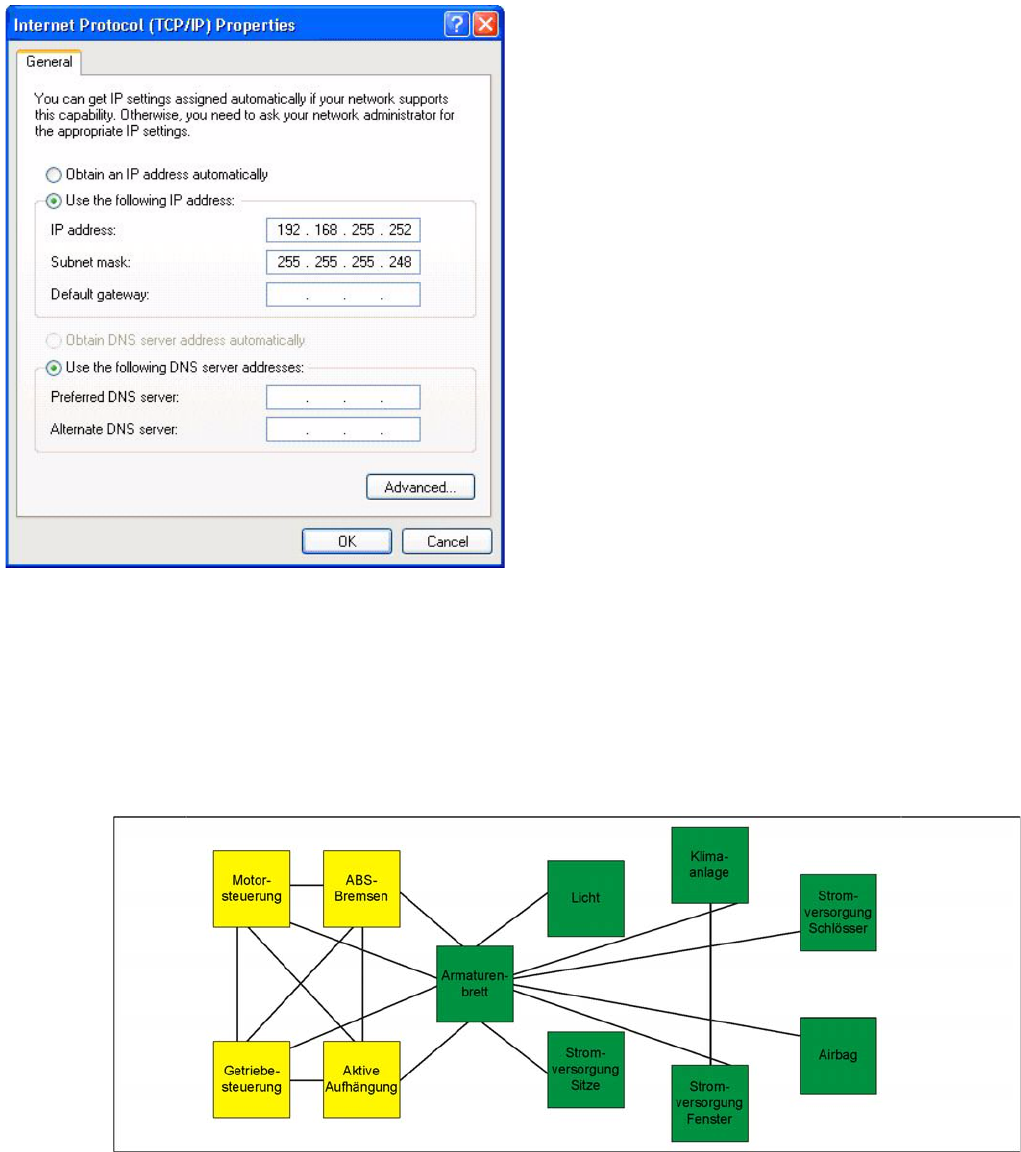
Internet Protocol Properties
► Wählen Sie aus der Liste Internet Protocol
(TCP/IP) und klicken Sie auf Properties.
▪ Netzwerkkarte 1: Connection to the SR:
Die Vernetzung zwischen Visionrechner und
Stationsrechner erfolgt über den LAN 1-Anschluss
beider Rechner. Die Netzwerkadresse ist fest
vorgegeben und darf nicht geändert werden.
IP-Adresse Visionrechner: 192.168.255.252
Diese TCP/IP-Adresse kann nur als Administrator
kontrolliert bzw. geändert werden.
▪ Netzwerkkarte 2: Local Area Connection 2:
Dieser Anschluss wird nicht benutzt.
Kommunikation und Steuerung
CAN-Bus Allgemeiner Aufbau
89 Student Guide SIPLACE X-Serie und X4I FSE
Kommunikation über den CAN-Bus
Allgemeiner Aufbau
4.3.1 Allgemeiner Aufbau
Sehen Sie dazu auch...
4.3.2 CAN-Bus-Protokoll [ ➙ 90]
4.3.2.2 CAN-Bus-Arbitrierung [ ➙ 90]
CAN-Bus
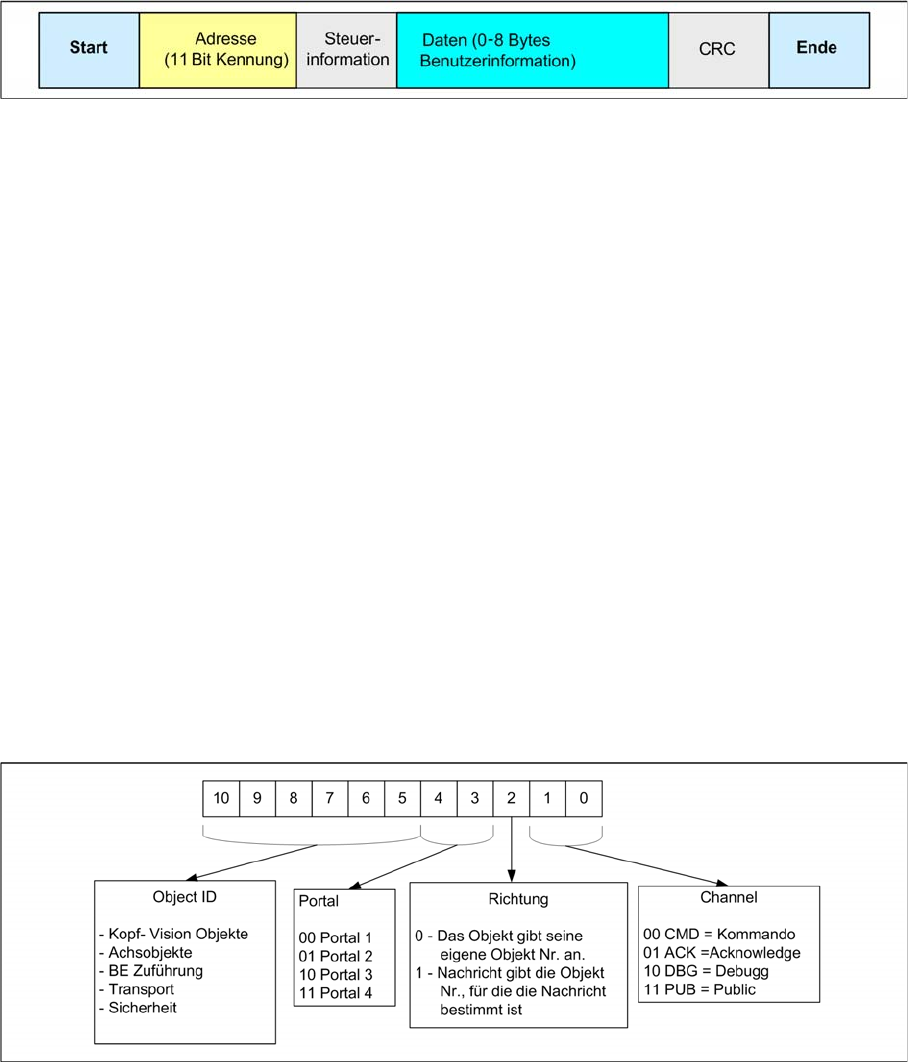
Der CAN-Bus ist ein dezentraler Multi-Master Bus. Über
die Differenzspannung der zwei Leitungen CAN_High
und CAN_Low, welche jeweils mit einem
Abschlusswiderstand von 120 Ohm versehen sind,
werden die Daten übertragen.
CAN-Bus-Controller und Mikrocontroller
Legende
▪ Mikrocontroller:
Tauscht mit dem CAN-Controller Daten aus
▪ CAN-Controller:
Fügt den Datenrahmen hinzu, baut die Verbindung
auf, erledigt die Fehlerbehandlung.
▪ Sender/Empfänger:
Pegelanpassung (Treiberstufen)
Jeder Busteilnehmer besitzt einen CAN-Controller,
welcher Daten senden und empfangen kann, wenn der
Bus frei ist.
Dieser CAN-Controller kommuniziert mit einem
Mikrocontroller. Der Mikrocontroller steuert und
kontrolliert den entsprechenden CAN-Bus-Teilnehmer.
Ein CAN-Bus-Teilnehmer kann nur senden, wenn der
Bus frei ist, d. h. keine Kommunikation zu anderen
Teilnehmern stattfindet. Der Zugriff auf den CAN-BUS
wird im CAN-Protokoll (Identifier) festgelegt. Damit
ergeben sich unterschiedliche Prioritäten der CAN-Bus-
Teilnehmer.
Kommunikation und Steuerung
CAN-Bus-Protokoll CAN-Bus
Student Guide SIPLACE X-Serie und X4I FSE 90
CAN-Bus-Protokoll
4.3.2 CAN-Bus-Protokoll
CAN-Bus-Protokoll
▪ Start
Dieses Bit kennzeichnet den Beginn eines Telegramms und besteht aus einem dominanten Bit. Ein
Teilnehmer (TN) kann mit der Arbitrierung nur beginnen, solange sich der Bus im Ruhezustand
befindet.
▪ Adressenfeld (11-Bit-Identifier)
Der Wert des 11-Bit-Identifier entscheidet über den Buszugriff. Der niedrigere Wert besitzt die
höhere Priorität.
▪ Steuerfeld
Die 4 niedrigsten Bit des 6-Bit-Feldes geben die Datenlänge des nachfolgenden Datenfeldes in
Bytes an (DLC: data length code).
▪ Datenfeld
Enthält die eigentliche Nutzinformation und kann 0 bis 8 Byte umfassen. Die Übertragung eines
Bytes beginnt mit dem höchstwertigen Bit.
▪ Datensicherungsfeld CRC
Besteht aus einer 15-Bit Prüfsequenz (CRC Sequence + CRC Delimiter = CRC Field - Cyclic
Redundancy Check), sowie einem rezessiv übertragenem Begrenzungsbit. Mit der in der
Prüfsequenz enthaltenen redundanten Information kann der Empfänger nachprüfen, ob die
empfangene Nachricht durch Störeinwirkungen verfälscht wurde.
▪ Ende
Jedes Datentelegramm wird durch eine Bitsequenz von 7 rezessiven Bits abgeschlossen.
11-Bit-Identifier
4.3.2.1 11-Bit-Identifier
11-Bit-Identifier
Das CAN-Bussystem verwendet den 11-Bit-Identifier zur Adressierung der versch. CAN-Objekte.
Ein 11 Bit langer Identifier (Adresse) identifiziert die Nachricht bzgl. Art, Priorität, Quelle und/oder Ziel.
Durch den Identifier wird auch der Buszugriff gesteuert (Arbitrierung).
CAN-Bus-Arbitrierung
4.3.2.2 CAN-Bus-Arbitrierung
Arbitrierung (engl. Arbitration bedeutet übersetzt Entscheidung)