00196043-05 - SG X und X4I FSE_de.pdf - 第67页
Überblick Übersicht Komponenten SIPLACE Vision 67 Student Guide SIPLACE X-Serie und X4I FSE IC-Kamera SST33 IC-Kamera SST33 Technische Daten Legende 1. Kameragehäuse mit integrierter Kamer a und Kamera-Verstärker 2. Inne…
Überblick
SIPLACE Vision Übersicht Komponenten
Student Guide SIPLACE X-Serie und X4I FSE 66
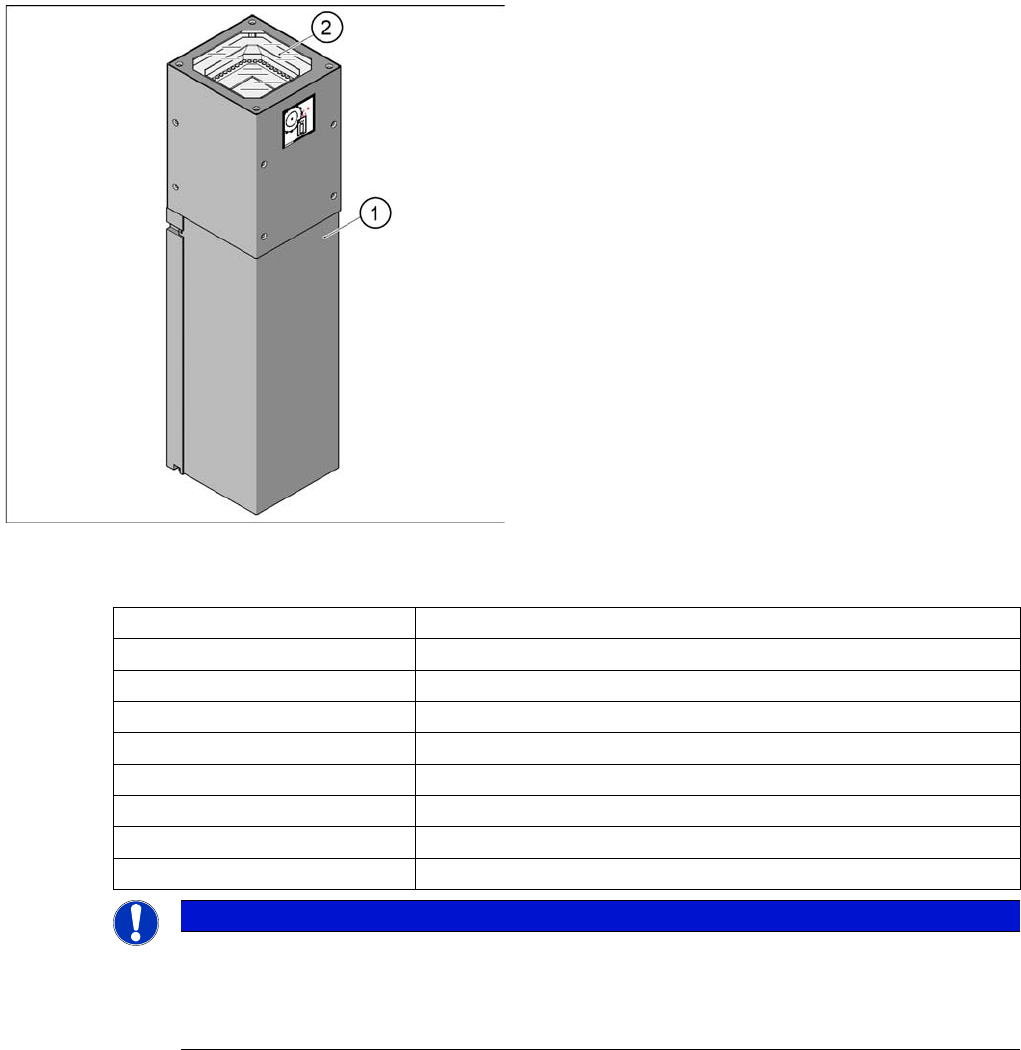
Flip-Chip-Kamera (Option) SST25
Flip-Chip-Kamera (Option) SST25
Technische Daten
Legende
1. Kameragehäuse mit integrierter Kamera und
Kamera-Verstärker
2. Innerhalb: die 6 Beleuchtungs- und Optikebenen
Die Flip-Chip-Kamera (FC-Kamera) verfügt über eine
höhere Auflösung und deckt damit das restliche
Bauteilspektrum der SMD-Bauelemente ab. Der Aufbau
der FC-Kamera ist identisch mit der IC-Kamera mit
seinen 6 Beleuchtungsebenen.
Größe der Bauelemente 0,2 mm x 0,2 mm bis 16 mm x 16 mm bei Einzelmessmodus
Bauelemente 01005, Flip Chip, µBGA, Bare Dies
Minimaler Beinchenabstand 0,25 mm
Min. Ball-Abstand 0,14 mm
Min. Ball-Durchmesser 0,08 mm
Gesichtfeld 19 mm x 19 mm
Art der Beleuchtung Auflichtverfahren (6 Ebenen frei programmierbar)
Auflösung 16 µm/Pixel
Kameratyp.sst 25.sst
HINWEIS
Die stationäre Kamera SST25 erhält ab der Version 05 einen Multiplexer. Damit kann zwischen
zwei stationären Kameras umgeschaltet werden. Der Multiplexer wird allerdings an der X-Serie
nicht verwendet.
► Beachten Sie die Kabelanschlüsse!
Überblick
Übersicht Komponenten SIPLACE Vision
67 Student Guide SIPLACE X-Serie und X4I FSE
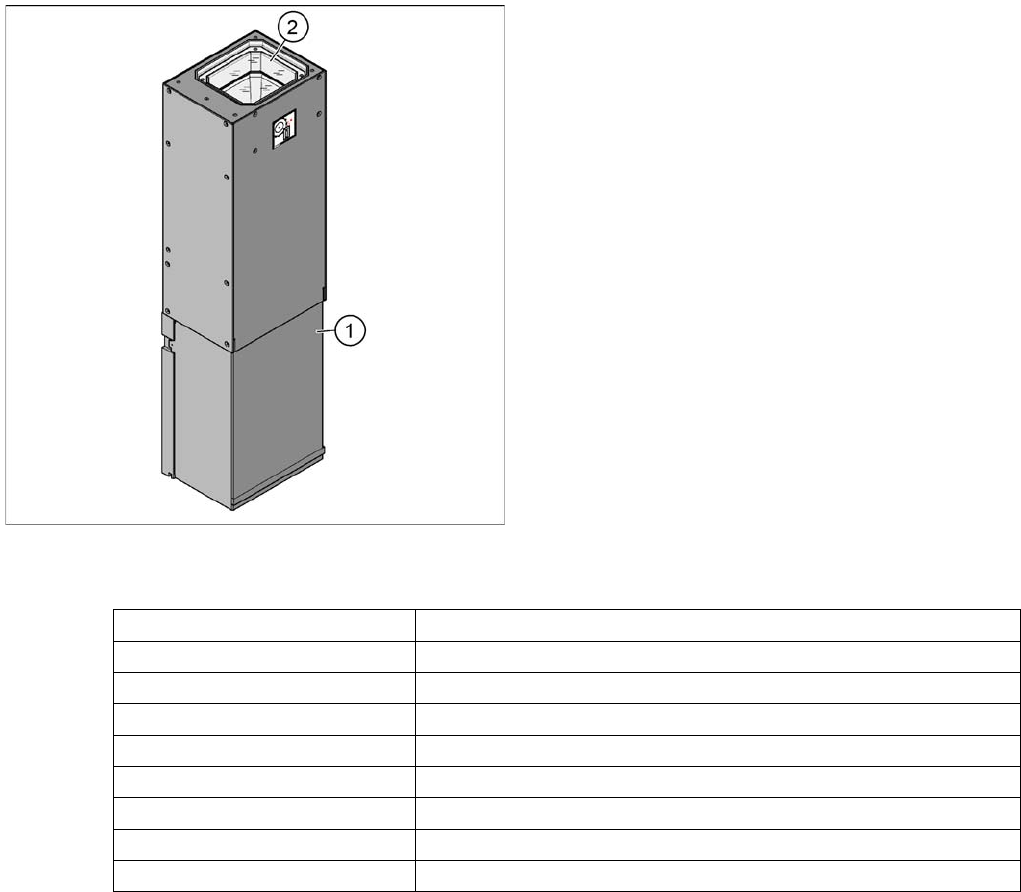
IC-Kamera SST33
IC-Kamera SST33
Technische Daten
Legende
1. Kameragehäuse mit integrierter Kamera und
Kamera-Verstärker
2. Innerhalb: die 6 Beleuchtungs- und Optikebenen
Größe der Bauelemente 0,5 mm x 0,5 mm bis 55 mm x 45 mm bei Einzelmessmodus
Bauelemente 0402, MELF, SO, PLCC, QFP, Elektrolytkondensoren, BGA
Minimaler Beinchenabstand 0,3 mm
Min. Ball-Abstand 0,45 mm
Min. Ball-Durchmesser 0,25 mm
Gesichtfeld 65 mm x 50 mm
Art der Beleuchtung Auflichtverfahren (6 Ebenen frei programmierbar)
Auflösung 41 µm/Pixel
Kameratyp.sst 33.sst
Überblick
C&P20A-Kopf Übersicht Komponenten
Student Guide SIPLACE X-Serie und X4I FSE 68
C&P20A-Kopf
3.2.9 C&P20A-Kopf
Technische Daten
Beschreibung
3.2.9.1 Beschreibung
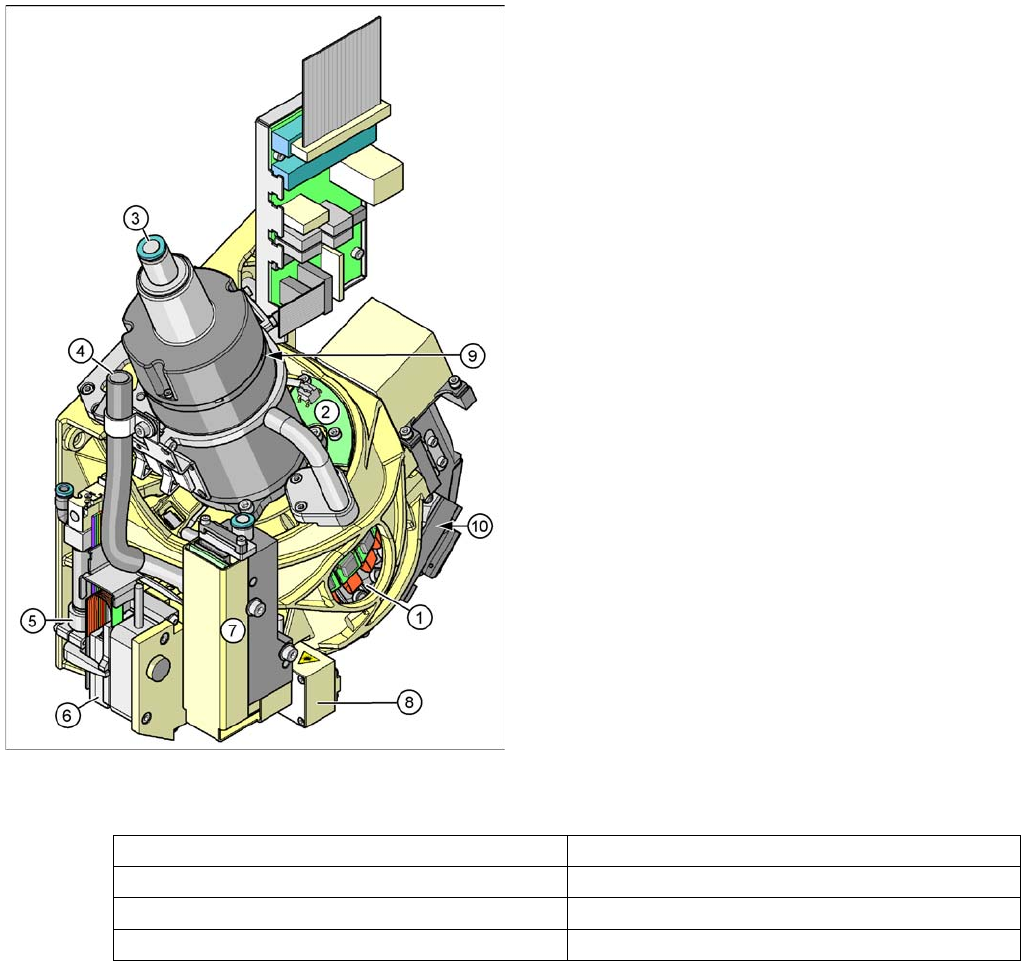
Der C&P20A-Kopf arbeitet nach dem Collect&Place-Prinzip (C&P), d. h. innerhalb eines Zyklus werden
zwanzig Bauelemente aus den Zuführmodulen (nur X-Förderer) abgeholt. Der BE-Sensor überprüft in
der Bestück-/Abholposition, ob ein Bauelement von der Pipette aufgenommen wurde bzw. ob das
Bauteil bestückt wurde. Auf dem Weg zur Bestückposition werden die Bauelemente in ihre Bestücklage
gedreht und optisch zentriert. Vor dem Bestücken der Bauelemente erfolgt die vom Visionsystem
ermittelte Winkel- und X-/Y-Lage-Korrektur. Die X-/Y-Lage-Korrektur wird in die Bestückposition
eingerechnet und die Winkelkorrektur erfolgt separat an jedem Segment. Dies ist möglich, da jedes
Segment sich unabhängig der Sternposition drehen kann. Danach werden die Bauelemente mit Hilfe
von Blasluft sanft und positionsgenau auf die Leiterplatte abgesetzt.
Die BE-Kamera ist weiterhin in den C&P20A-Kopf integriert. Dies spart zusätzliche Fahrwege zu
externen Zentrierkameras.
Legende
1. Stern mit 20 Segmenten (DP-Antrieben)
2. Platine "Vakuumsensor Haltekreis"
3. Druckluftversorgung Halte-, Abhol- und Bestückkreis
4. Kühlung X-Linearmotor (Abluft vom Druckregelventil)
5. Rückholzylinder Z-Achse
6. Z-Linearmotor mit Messsystem
7. Druckregelventil für den Abhol- und Bestückkreis
8. Bauelemente-Sensor
9. Sternmotor mit Messsystem
10. BE-Kamera
Bauelemente 01005 bis 2220, Melf, SOT, SOD
Maximale BE-Größe 6mm x 6mm x 4mm (LxBxH)
Minimaler BE-Größe 0,4 mm x 0,2 mm (01005)
Maximales BE-Gewicht 1g