00196043-05 - SG X und X4I FSE_de.pdf - 第293页
Collect-, Pick- und Place-Kopf (CPP) Übersicht Teileübersicht 293 Student Guide SIPLACE X-Serie und X4I FSE Abdeckung mit Haltek reissensor 8.2.7.15 Abdeckung mit Haltekreissensor Legende 1. Hinter e Kopf-Abd eckung Die …
Collect-, Pick- und Place-Kopf (CPP)
Teileübersicht Übersicht
Student Guide SIPLACE X-Serie und X4I FSE 292
Sternmot or
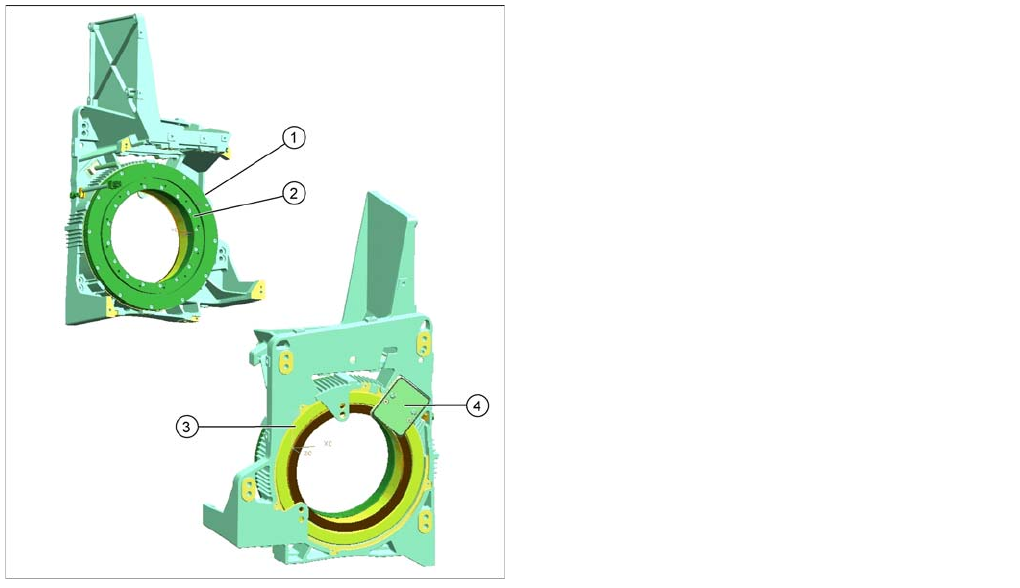
8.2.7.14 Sternmotor
Funktionsweise des Sternmotors
Funktionsweise des Sternmotors
▪ Der Sternmotor ist ein bürstenloser 3-Phasen-Servomotor mit Sinus-Kommutierung.
▪ Zur Kommutierung sowie zur Erkennung des Drehwinkels wird ein optisches Messsystem
verwendet. Dieses liefert die Spursignale A, B und den Nullimpuls. Auf dem Inkremental-
Messsystem befinden sich 3600 Striche und eine Referenzmarke. Bei einer Vervielfachung von 25
ergibt sich für 1 Digit = 0.004° bzw. 250 Digit = 1°.
▪ Der Motor wird mit Hilfe der Spursignale geregelt. Die Ist-Werte der Position werden auf der
Reglerbaugruppe der HCU (A364) ausgewertet. Zur Leistungsverstärkung dient das Power-Modul
der HCU (Servokarte), welche von der Achskarte mit zwei Phasenströmen versorgt wird. Die dritte
Phase wird rechnerisch ermittelt.
▪ An der Zuleitung des Sternmotors, befindet sich eine Platine mit einem EEprom, in dem folgende
Daten gespeichert werden:
– Fertigungsdaten (Hersteller, Seriennummer, ...)
– Betriebsdaten (Fehler, Fahrzyklen, ...)
– Maschinendaten (Motordaten, Verfahrprofile, Nullpunktkorrektur, max. und min. Position)
Legende
1. Stator Sternmotor
2. Rotor Sternmotor
Schnittstelle zur Befestigung des Sternträgers.
3. Inkrementales Messsystem
4. Leseeinheit inkrementales Messsystem
▪ Der Sternmotor ist ein Servomotor, wobei die Spule
um den Stator (1) gewickelt ist und die Magnete vom
Rotor (2) aufgenommen werden.
▪ Der Vorteil eines Torque-Motors ist eine sehr
schnelle Reaktionszeit bei einem geringem Hub (30°
Schritte). Der Motor arbeitet kontaktlos, d. h. es gibt
keinen Verschleiß.
▪ Das Kopfgehäuse dient gleichzeitig als
Motorgehäuse.
▪ Der Sternmotor ist kein Ersatzteil und kann nicht
getauscht werden.
Collect-, Pick- und Place-Kopf (CPP)
Übersicht Teileübersicht
293 Student Guide SIPLACE X-Serie und X4I FSE
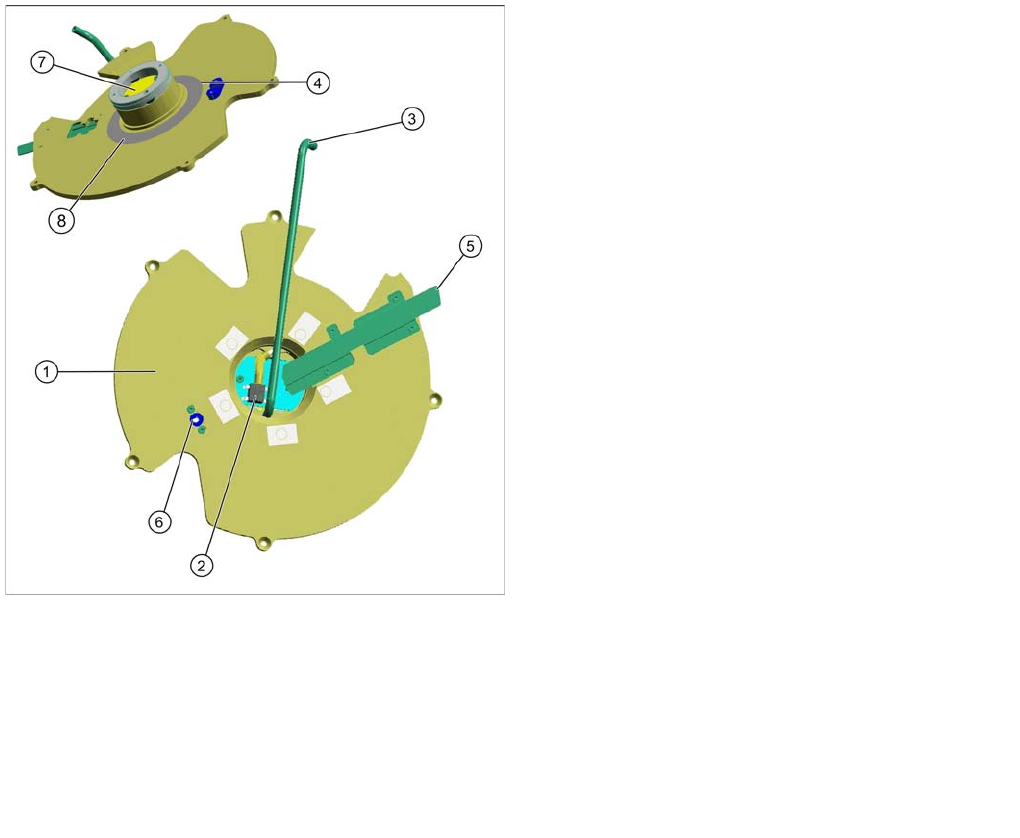
Abdeckung mit Haltekreissensor
8.2.7.15 Abdeckung mit Haltekreissensor
Legende
1. Hintere Kopf-Abdeckung
Die hintere Abdeckung des CPP-Kopfes wird mit 5
Schrauben am Kopfgehäuse befestigt. Der Kopf
muss dafür vom Portal demontiert werden.
2. Haltekreissensor
In dieser Abdeckung befindet sich die Platine mit dem
Haltekreissensor. Dieser dient der Überwachung des
Vakuums im Haltekreis.
3. Metallrohr
Über das Metallrohr wird der Bestück-/Abholkreis
vom Druckregelventil mit Vakuum bzw. Blasluft
versorgt.
4. Schliff
Im inneren der Abdeckung, befindet sich der Schliff.
Dieser besitzt zwei Bohrungen. Eine Bohrung führt
zur Abhol- und Bestückposition. Über die andere
Bohrung, kann das Vakuum im Haltekreis in einer
bestimmten Position gemessen werden.
5. Datenversorgung
Hier befinden sich ein Kabel für die Platine
Haltekreissensor und ein weiteres Kabel für die
Spannungs- und Datenversorgung der DP-Antriebe,
Ventilinsel und SCS.
6. Zentrierstift
Der Zentrierstift fixiert den festen Teil des E/D-
Übertragers (nur bei CPP-Köpfen < Version 05).
7. Kontaktlose Datenübertragung (Sender)
8. Stator für kontaktlose Energieübertragung (CPP-
Köpfe > Version 05)
Collect-, Pick- und Place-Kopf (CPP)
Teileübersicht Übersicht
Student Guide SIPLACE X-Serie und X4I FSE 294
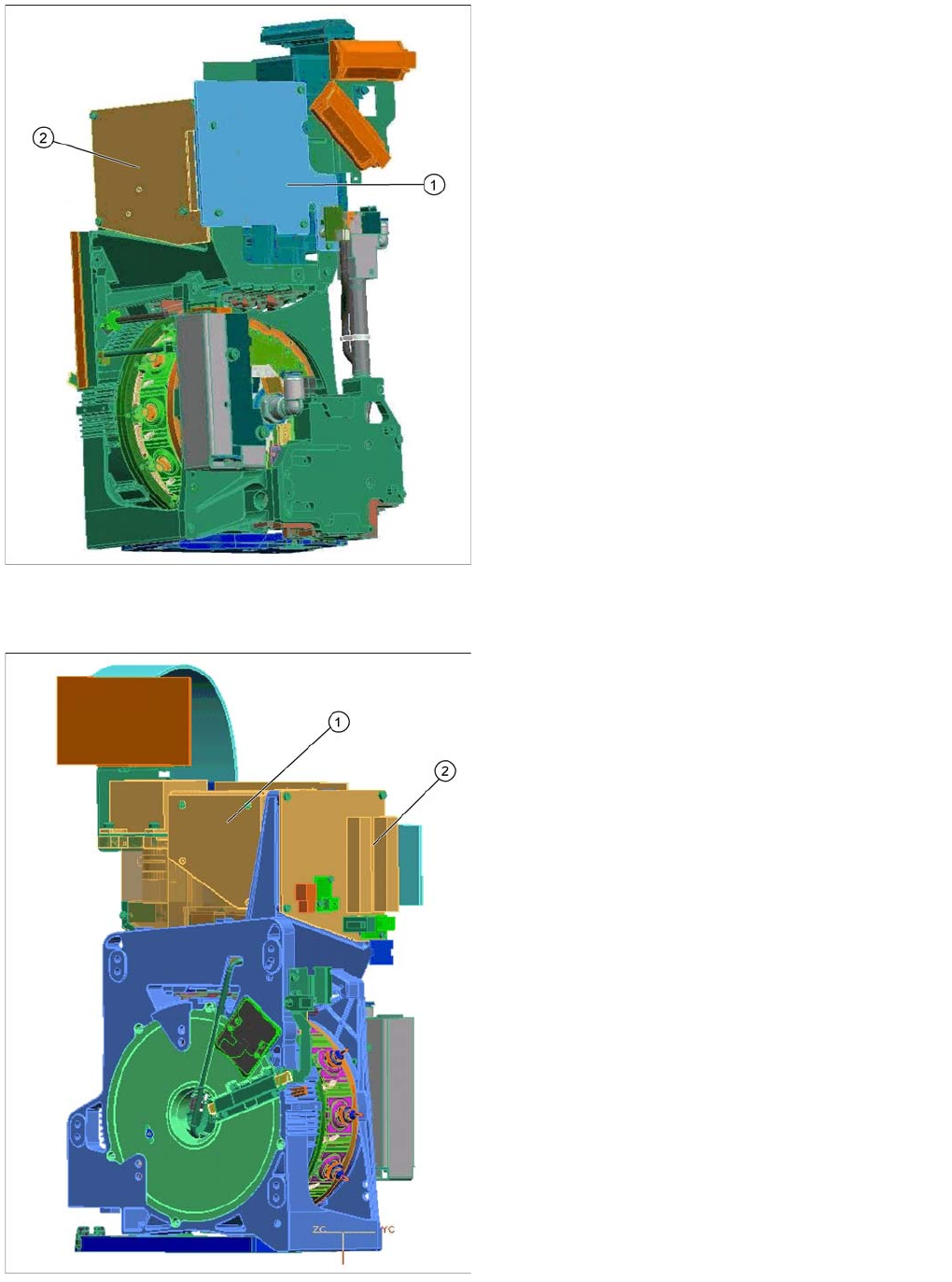
Zwischenverteiler
8.2.7.16 Zwischenverteiler
BE-Kamera
8.2.7.17 BE-Kamera
Legende
Der Zwischenverteiler besteht aus zwei Platinen:
1. Der Zwischenverteiler 1 ist auf der Vorderseite des
Kopfes montiert.
2. Der Zwischenverteiler 2 ist links an der Seite des
Kopfes montiert.
Funktionen des Zwischenverteilers:
▪ LEDs zeigen die Betriebsspannungen am Kopf und
die Zustände der Sensoren
▪ Teststecker für Spursignale und Testpins für analoge
Signale
▪ Geregelte Stromversorgung für Inkrementalgeber
von Z- und Stern-Antrieb
▪ Schnittstelle für BE-Sensor, Vakuumeinheit,
Vakuumsensor-Haltekreis und EEPROM
▪ Ansteuerschaltung für den Rückholzylinder
Legende
1. BE-Kamera
2. Zwischenverteiler 2
BE-Kamera (SST29 / SST38)
Die Bauelemente Kamera ist wie bei den C&P6/12-
Köpfen in der 12-Uhr-Position montiert.
Sie hat die Aufgabe das Bauteil optisch zu erkennen und
deren Mittelpunkt zu berechnen.
Die BE-Kamera wertet die ermittelten Daten aus und
rechnet den Offset zwischen Bauteilmittelpunkt und
Pipettenmittelpunkt sowie den Winkel in die
Bestückposition ein.