00196043-05 - SG X und X4I FSE_de.pdf - 第220页
C&P20A Teileübersicht mit F unktionsbeschreibung Übersicht Student Guide SIPLACE X-Serie und X4I FSE 220 Bauelement e-Sensor 7.2.3.4 Bauelemente-Sensor Der BE-Se nsor ist am C&P2 0A Standa rd und keine Option wie…
C&P20A
Übersicht Teileübersicht mit Funktionsbeschreibung
219 Student Guide SIPLACE X-Serie und X4I FSE
Funktionsweise des Z Antriebs
Funktionsweise des Z Antriebs
Rückholeinheit
7.2.3.3 Rückholeinheit
Funktionsweise der Rückholeinheit
Im stromlosen Zustand ist die Lagerreibung der Z-Achse nicht ausreichend, um die Achse gegen
Herunterfallen zu sichern. Um bei Verschieben des Portals auch bei ausgeschalteter Maschine die Z-
Achse zu schützen, wurde ein pneumatisches Rückholsystem eingebaut. Diese Rückholeinheit hält die
Z-Achse in stromlosem Zustand in der sicheren oberen Position.
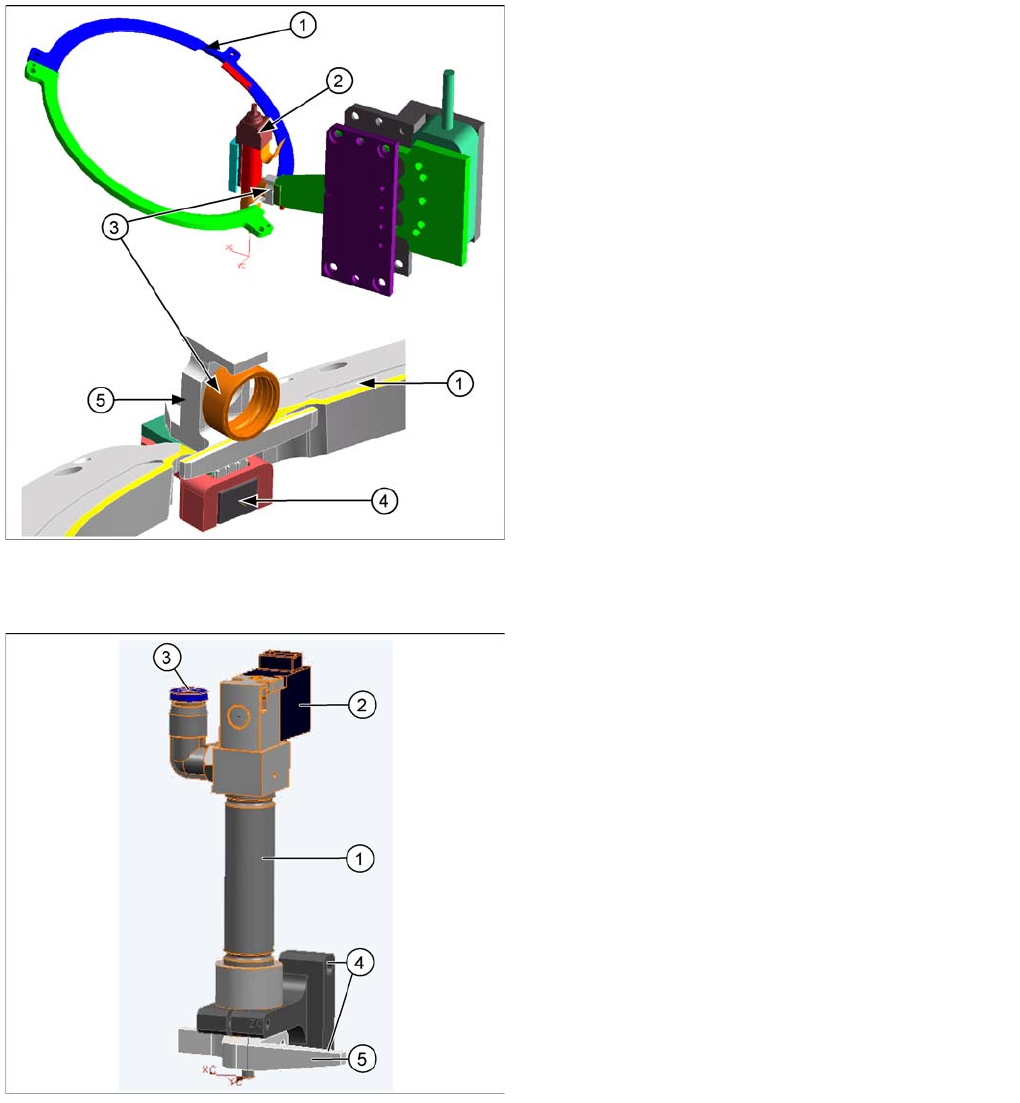
Legende
1. Laufring
2. Segment
3. Kugellager
4. Lichtschranke unten
5. Rachen
▪ Am Primärteil des Z-Motors ist der Rachen
angebracht, der zur mechanischen Einkopplung der
Segmente dient.
▪ Zur Erkennung der Aufsetzposition in Z-Richtung ist
in der Bestückposition ein Z-unten-Sensor
angebracht, der eine Relativbewegung zwischen
Pipette und DP-Segment erkennt.. Dieser Sensor
liefert bei Einfedern der Z-Achse ein Signal an die
Achskarte. Das Signal der LS_unten ist direkt mit
dem Messsignal des Inkrementalgebers der Z-Achse
gekoppelt.
Legende
1. Pneumatikzylinder
2. Magnetventil
3. Druckluftanschluss
4. Befestigung der Rückholeinheit
5. Mitnehmer für Z-Achse
Die Rückholeinheit ist an der Z-Achse montiert und hat
die Aufgabe, bei unerwarteten Ereignissen z. B
Stromausfall oder beim Ausschalten der Maschine, die
Z-Achse in einen sicheren Bereich zu fahren und vor
Beschädigungen zu schützen.
Die Rückholeinheit ist mit zwei Schrauben befestigt und
kann im Servicefall leicht ausgetauscht werden.
C&P20A
Teileübersicht mit Funktionsbeschreibung Übersicht
Student Guide SIPLACE X-Serie und X4I FSE 220
Bauelemente-Sensor
7.2.3.4 Bauelemente-Sensor
Der BE-Sensor ist am C&P20A Standard und keine Option wie bei den DLM-Köpfen. Die Funktion und
die Position des BE-Sensors ist im Gegensatz zu den DLM-Köpfen unterschiedlich. Der BE-Sensor
befindet sich in der Bestück-/Abholposition und die Z-Achse fährt während der Abwärts- und
Aufwärtsbewegung durch den Laserstrahl. Wird der Laserstrahl unterbrochen bzw. wieder frei, wird die
genaue Z-Position ausgelesen und die entsprechende Auswertung gestartet.
(Vor dem Abholen: kein BE an der Pipette, nach dem Abholen: BE an der Pipette;
Bestücken: BE noch an der Pipette, nach dem Bestücken: BE nicht mehr an der Pipette)
HINWEIS
Die Steuerung der Z-Achse ist so ausgeführt, dass bei Ausfall der Energieversorgung der
Maschine genügend Energie auf der Servobaugruppe und Achskarte des Z-Motors
zwischengespeichert ist, um die Z-Achse in die obere Position zu fahren.
Die Erkennung des Netzausfalles erfolgt über ein "Power fail"-Signal. Das "Power fail"-Signal
aktiviert die entsprechende Funktion (Hochfahren und Aktivieren der Rückholeinheit) auf der
Achskarte.
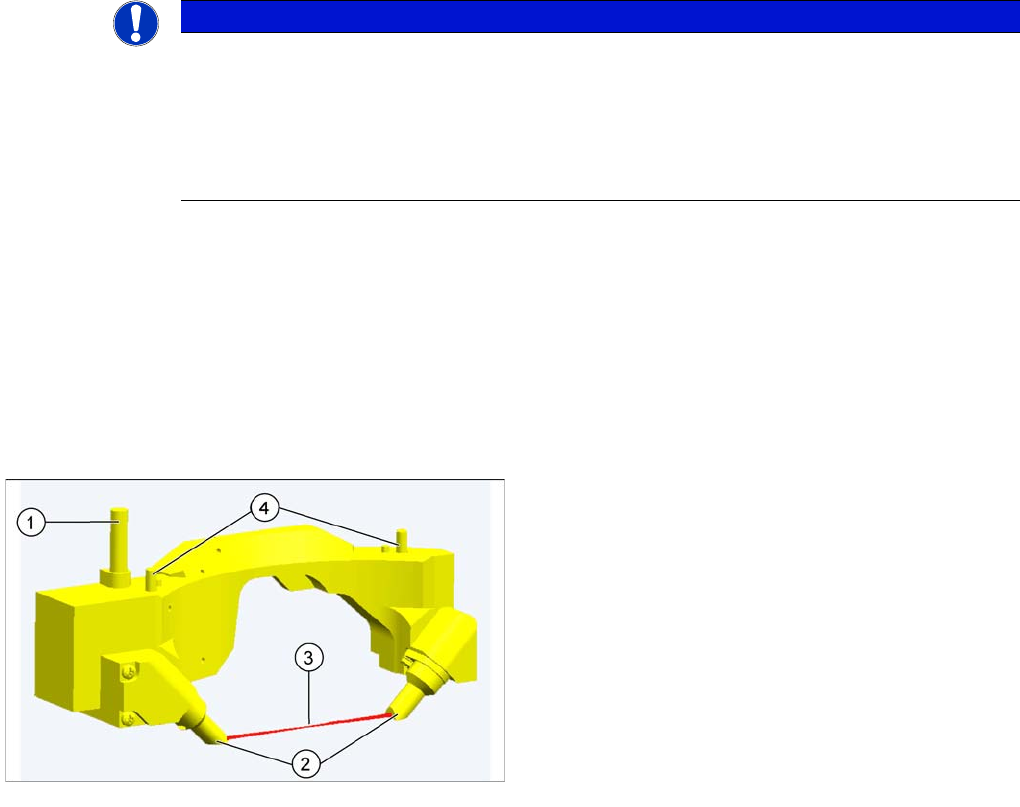
BE-Sensor
▪ Der BE-Sensor ist standardmäßig am C&P20A in der
Bestück-Abholposition installiert.
▪ Der BE Sensor ist mit zwei Schrauben am Kopf
montiert und kann als komplette Einheit im Servicefall
getauscht werden.
Legende
1. Leitung zur Energie-/ Datenversorgung
2. Sender- und Empfängereinheit
3. Laserstrahl
4. Befestigung am Gehäuse
C&P20A
Übersicht Teileübersicht mit Funktionsbeschreibung
221 Student Guide SIPLACE X-Serie und X4I FSE
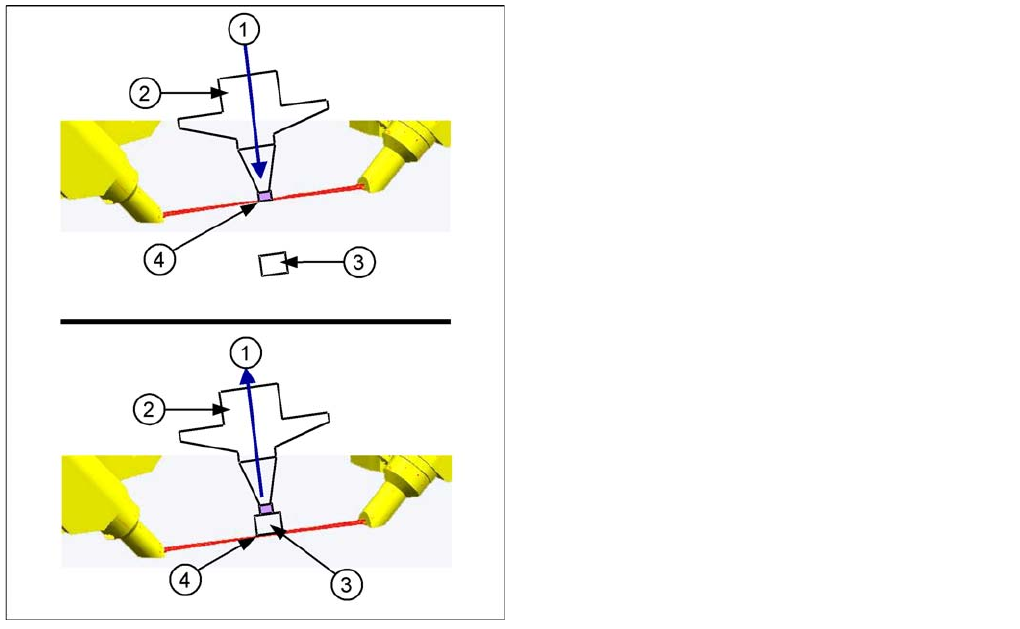
Funktionsweise des BE-Sensors
Funktionsweise des BE-Sensors
Abholvorgang:
Bei der Abwärtsbewegung der Z-Achse, unterbricht die Pipette den Laserstrahl. Diese Position der Z-
Achse wird genau in diesem Moment ausgelesen und mit dem Referenzwert vom Höhenreferenzlauf
bzw. nach dem Bestücken mit diesem Segment verglichen. Somit wird ermittelt ob sich noch ein BE an
der Pipette befindet. Weist die Z-Achsenposition auf ein BE an der Pipette hin, so wird die Z-Achse sofort
gestoppt. Eine Fehlermeldung wird ausgegeben oder das Bauelement wird abgeworfen und dem
Reparaturzyklus zugeführt, da es nicht bestückt wurde.
Bei der Aufwärtsbewegung der Z-Achse wird der Laserstrahl wieder frei und die Z-Position wird in
diesem Moment ausgelesen. Aufgrund der Z-Position bei der Abwärtsbewegung kann jetzt die
Anwesenheit eines Bauteils und die Höhe des BEs bestimmt werden.
Bestückvorgang:
Beim Bestückvorgang wird kontrolliert, ob sich das BE noch an der Pipette befindet (Z-
Abwärtsbewegung) bzw. ob das BE bestückt wurde (Z-Aufwärtsbewegung). Als Sicherheit werden diese
Z-Positionen mit denen vom Abholvorgang verglichen.
Damit wird eine max. Abhol- und Bestücksicherheit erreicht.
Legende
1. Abwärts- (obere Abb.) bzw. Aufwärtsbewegung
(untere Abb.)
2. Pipette
3. Bauelement
4. Auslesen der Z-Position, wenn der Laserstrahl
unterbrochen (obere Abb.) bzw. frei (untere Abb.) ist.
Das Signal des BE-Sensors ist direkt mit dem
Achscontroller (Messsystem) der Z-Achse verbunden.
Somit kann die Z-Position während der Abwärts- und
Aufwärtsbewegung ausgelesen werden.