00196043-05 - SG X und X4I FSE_de.pdf - 第278页
Collect-, Pick- und Place-Kopf (CPP) Konfiguration Übersicht Student Guide SIPLACE X-Serie und X4I FSE 278 Konfigurat ion 8.2.2 Konfiguration Der CPP-Kopf mit 12 Segmenten k ann folgen dermaßen konfigur iert werden: ▪ Mo…
Collect-, Pick- und Place-Kopf (CPP)
Wichtige Hinweise Einsatz
277 Student Guide SIPLACE X-Serie und X4I FSE
Collect-, Pick- und Place-K opf (CPP)
8 Collect-, Pick- und Place-Kopf (CPP)
Wichtige Hinweise
8.1 Wichtige Hinweise
Übersicht
8.2 Übersicht
Einsatz
8.2.1 Einsatz
Der CPP-Kopf kann an folgenden Maschinen eingesetzt werden:
▪ X-Serie (X2, X3, X4, X4I)
▪ SX1 - Maschine mit einem Portal
▪ SX2 - Maschine mit zwei Portalen
▪ SX4 - Maschine mit vier Portalen
VORSICHT
Kopftausch X-Serie
Beim Kopftausch von TwinHead auf einen CPP-Kopf mit einem MTC2 in diesem
Bestückbereich muss eine Pufferverlängerung eingebaut werden, die den Y-Verfahrweg
begrenzt. Nach dem Wiedereinschalten der Maschine müssen der Maschinennullpunkt und die
Verfahrwege neu ermittelt werden.
Wird wieder ein TwinHead eingebaut, so muss diese Pufferverlängerung entfernt werden.
VORSICHT
Kopfcrashgefahr!
Bei der Installation eines CPP-Kopfes mit einer stationären Kameras muss dieser in der oberen
Position montiert werden. Ansonsten besteht Kopfcrashgefahr!
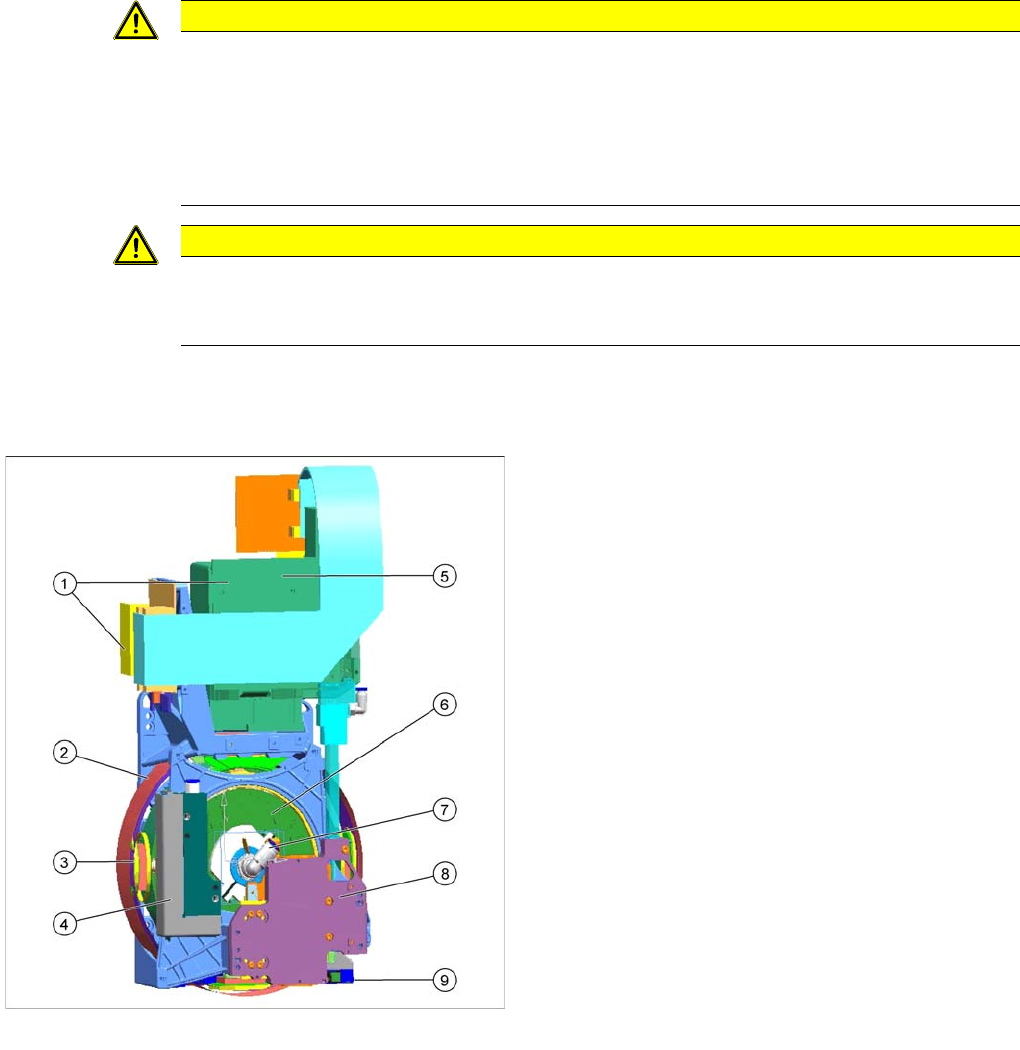
CPP-Kopf Übersicht
CPP-Bestückkopf ohne Kamera
[03053528-xx]
CPP-Bestückkopf mit Kamera SST29 [03053528-xx]
Legende
1. Zwischenverteiler 1 und 2
2. Sternmotor (im Kopfgehäuse integriert)
3. DP-Achse (als Direktantrieb)
4. Druckregelventil
5. BE-Kamera (hinter dem Zwischenverteiler, Standard:
SST29)
6. Single-Core-Solution (SCS) – Ansteuerung
DP-Antriebe
7. Haltekreisversorgung, eingebaute Venturidüsen und
Ventilschaltbaugruppe (Ventilinsel)
8. Z-Achse mit Rückholzylinder
9. BE-Sensor in der Bestück- und Abholposition
Collect-, Pick- und Place-Kopf (CPP)
Konfiguration Übersicht
Student Guide SIPLACE X-Serie und X4I FSE 278
Konfiguration
8.2.2 Konfiguration
Der CPP-Kopf mit 12 Segmenten kann folgendermaßen konfiguriert werden:
▪ Montagehöhe Tief (CPP_L)
▪ Montagehöhe Hoch (CPP_H)
Voraussetzungen
8.2.3 Voraussetzungen
Folgende Voraussetzungen müssen für den Einsatz des CPP-Kopfes an X-Serien-Maschinen erfüllt
sein:
▪ A364-Achscontroller mit Servoverstärker SDS120-1.5Z2 oder HCU (Head Control Unit)
▪ Stationsoftware ≥ SW702
▪Box-PC
▪ Kopfplatte für CPP-Kopf
▪ X-Tische und X-Förderer
▪ Ansteuerung des Pipettenwechslers über CAN-Knoten bzw. FCU (Feeder Control Unit)
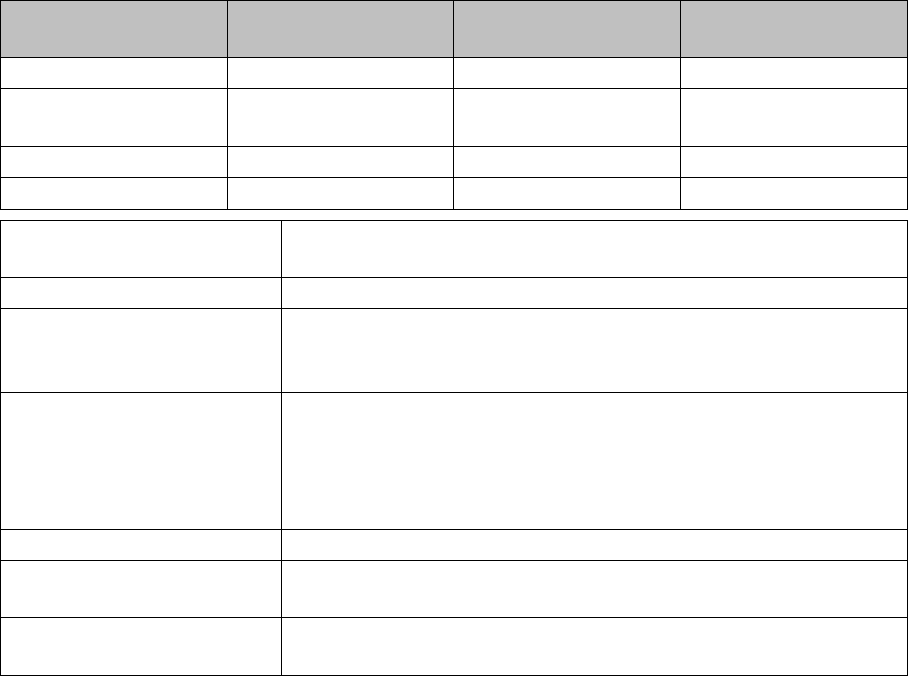
Technische Daten
8.2.4 Technische Daten
Das BE-Spektrum ist abhängig von der installierten Bauelementekamera und dem daraus folgendem
Bestückmodus.
Besondere Merkmale des CPP-Kopfes
8.2.5 Besondere Merkmale des CPP-Kopfes
▪ Es gibt verschiedene Bestückmodi: C&P-, P&P- und Mixed-Mode.
▪ Symmetrischer Aufbau des Kopfes: Der Kopf ist somit links und rechts montierbar.
▪ Bauteilspektrum BE 01005 – 50x40 mm
Bauteilhöhe max. 11,5 mm
BE-Spektrum Bauelemente-Kamera
SST29
Bauelemente-Kamera
SST38
IC-Kamera SST33
C&P-Mode (min. BE) 0201 01005 (0603)
C&P-Mode (max. BE) 27x27 mm / (µBGA bis
18x18 mm)
16x16 mm
P&P-Mode (max. BE) 50x40 mm
Mixed-Mode (max. BE) 32x32 mm
Bauteilhöhe (CPP_H) max. 8,5 mm C&P-Mode
max. 8,5-11,5 mm im P&P- und Mixed-Mode
Bauteilhöhe (CPP_L) max. 6 mm, bei max. Bestückleistung
Bestückgenauigkeit +/- 50 µm (4 Sigma) im C&P-Mode mit SST38
+/- 55 µm (4 Sigma) im C&P-Mode mit SST29
+/- 45 µm (4 Sigma) im P&P-Mode mit stationären Kameras
Aufsetzkraft 1 N +/- 0,6N Stromsensor
2,2N +/- 0,5N Stromsensor
2,6N +/- 0,8N Lichtschrankenmodus
3,0N-6,0N +/- 1N Stromsensor
6,0N - 10,0N +/-1,5N Stromsensor
Gewicht Kopf ca. 5,3 kg mit BE-Kamera
BE-Gewicht: max. 4 g im C&P-Mode, Mixed-Mode
max. 8 g im P&P-Mode
BE-Kameras SST29 (0201 bis 27x27, Standard)
SST38 (01005 bis 16x16)
Collect-, Pick- und Place-Kopf (CPP)
Übersicht Prinzip des CPP-Kopfes
279 Student Guide SIPLACE X-Serie und X4I FSE
▪ Der Haltekreis besteht aus je einer Venturidüse pro Segment:
Keine Beeinflussung der Segmente untereinander.
▪ Jedes Segment besitzt ein eigenes Ventil. So kann jedes Segment separat abgeschaltet werden.
Dadurch wird der Luftverbrauch reduziert.
▪ Jedes Segment besitzt einen eigenen Motor mit inkrementalem Messsystem.
Die Segmente können unabhängig voneinander gedreht werden.
▪ Die Lichtschranke unten ist in jedem Segment integriert.
Daraus ergibt sich eine höhere Bestücksicherheit. Eine Einstellung der Lichtschranke unten ist nicht
notwendig. Dieser Aufbau ist robuster, da man ohne bewegliche Kabel auskommt.
▪ Ein digitales Druckregelventil ermöglicht schnellere Schaltzeiten zwischen Vakuum und Blasluft.
▪ Die BE-Sensoren in der Abhol-/Bestückposition sind robuster. Die Prismen sind mechanisch
geschützt.
Daraus ergibt sich eine höhere Bestücksicherheit.
▪ Robuste Pipettenschnittstelle und Pipettenmagazine
▪ Pipettentypen 20xx und 28xx mit entsprechenden Magazinen
Prinzip d es CPP-Kopfes
8.2.6 Prinzip des CPP-Kopfes
▪ Der CPP-Kopf arbeitet wie der C&P12-Kopf nach dem Collect&Place-Prinzip, wobei die zusätzlichen
Betriebsmodi Pick&Place und Mixed-Mode zur Erweiterung des Bauteilespektrums möglich sind.
▪ Jedes Segment ist mit einem eigenen DP-Antrieb und einem inkrementalen Messsystem
ausgerüstet, dadurch kann die Winkelpositionierung während der Sterndrehung erfolgen.
▪ Die Energie- und Datenübertragung vom stationären Teil des Kopfes, erfolgt über einen KE-
Übertrager (kontaktlose Energieübertragung) und einen KD-Übertrager (kontaktlose
Datenübertragung) zur Steuerplatine (Single Core Solution-SCS) und den DP-Antrieben.
▪ Zusätzlich befindet sich in jedem DP-Antrieb die Lichtschranke Z_unten. Zusammen mit dem
Sekundärteil des Linearmotors (Z-Achse) gibt es kein Kabel, welches durch die Z-Bewegung bewegt
wird.
▪ Über eine so genannte Ventilinsel, kann der Versorgungsdruck der einzelnen Venturidüsen für jedes
Segment an- und abgeschaltet werden.
▪ In der Bestück- und Abholposition bewegt sich die Z-Achse mit dem kompletten DP-Antrieb nach
unten bzw. oben.
▪ Im Abholzyklus wird das Vakuum vom Haltekreis über ein Druckregelventil erhöht. Beim Bestücken
wird das Vakuum vom Haltekreis mit Blasluft eliminiert und die Bauteile abgeblasen.
▪ Mit dem standardmäßig installierten BE-Sensor in der Bestück/Abholposition wird vor und nach dem
Abholen/Bestücken die Anwesenheit und/oder Höhe des Bauelementes an der Pipette überprüft.