00196043-05 - SG X und X4I FSE_de.pdf - 第290页
Collect-, Pick- und Place-Kopf (CPP) Teileübersicht Übersicht Student Guide SIPLACE X-Serie und X4I FSE 290 Energieü bertragung Energieübertragung ▪ Die Energieübertra gung geschieht mit Hilf e eines geteilten Transforma…
Collect-, Pick- und Place-Kopf (CPP)
Übersicht Teileübersicht
289 Student Guide SIPLACE X-Serie und X4I FSE
Energieü bertragung
Energieübertragung
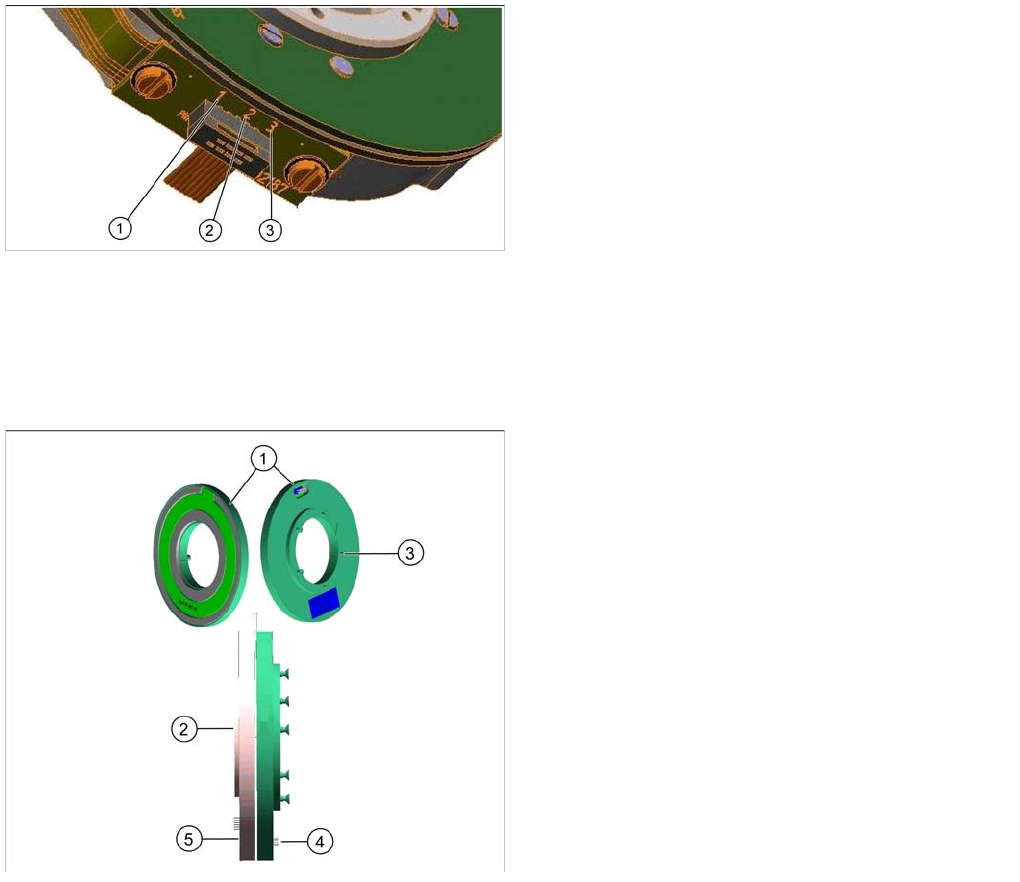
▪ Zur Energieübertragung werden zwei Übertragungsleitungen benötigt:P24V (1) und GND (2).
▪ Eine weitere Leitung (3) (Schleifbahn) stellt die Verbindung zwischen dem drehenden Teil und der
Gehäuseerde her (EGB-Schutz).
Kontaktl oser Energieübert rager (für CPP-Köpfe ab Version 05)
8.2.7.12 Kontaktloser Energieübertrager (für CPP-Köpfe ab Version 05)
▪ Der kontaklose Energieübertrager besteht aus zwei Teilen, einem Stator (1) und einem Rotor (2).
▪ Die Ansteuerung erfolgt über eine zusätzliche Platine, die sich auf dem Zwischenverteiler 2 als
Huckepackplatine befindet.
▪ Der Stator ist an der hinteren Abdeckung des Bestückkopfes befestigt, das rotierende Teil, Rotor,
(2) ist über die Ventilinsel am Sternträger befestigt.
▪ In der Mitte dieses KE-Übertragers, befindet sich der KD-Übertrager (kontaktlose
Datenübertragung).
Legende
1. P24V
2. GND
3. EGB-Schutz
Legende
1. Stationärer Teil (Stator)
2. Rotierender Teil (Rotor)
3. Befestigungsschraube an der hinteren Abdeckung
(5x)
4. Spannungsversorgung vom Zwischenverteiler zum
Stator
5. Zentrierstift
6. Stecker zur SCS
Collect-, Pick- und Place-Kopf (CPP)
Teileübersicht Übersicht
Student Guide SIPLACE X-Serie und X4I FSE 290
Energieü bertragung
Energieübertragung
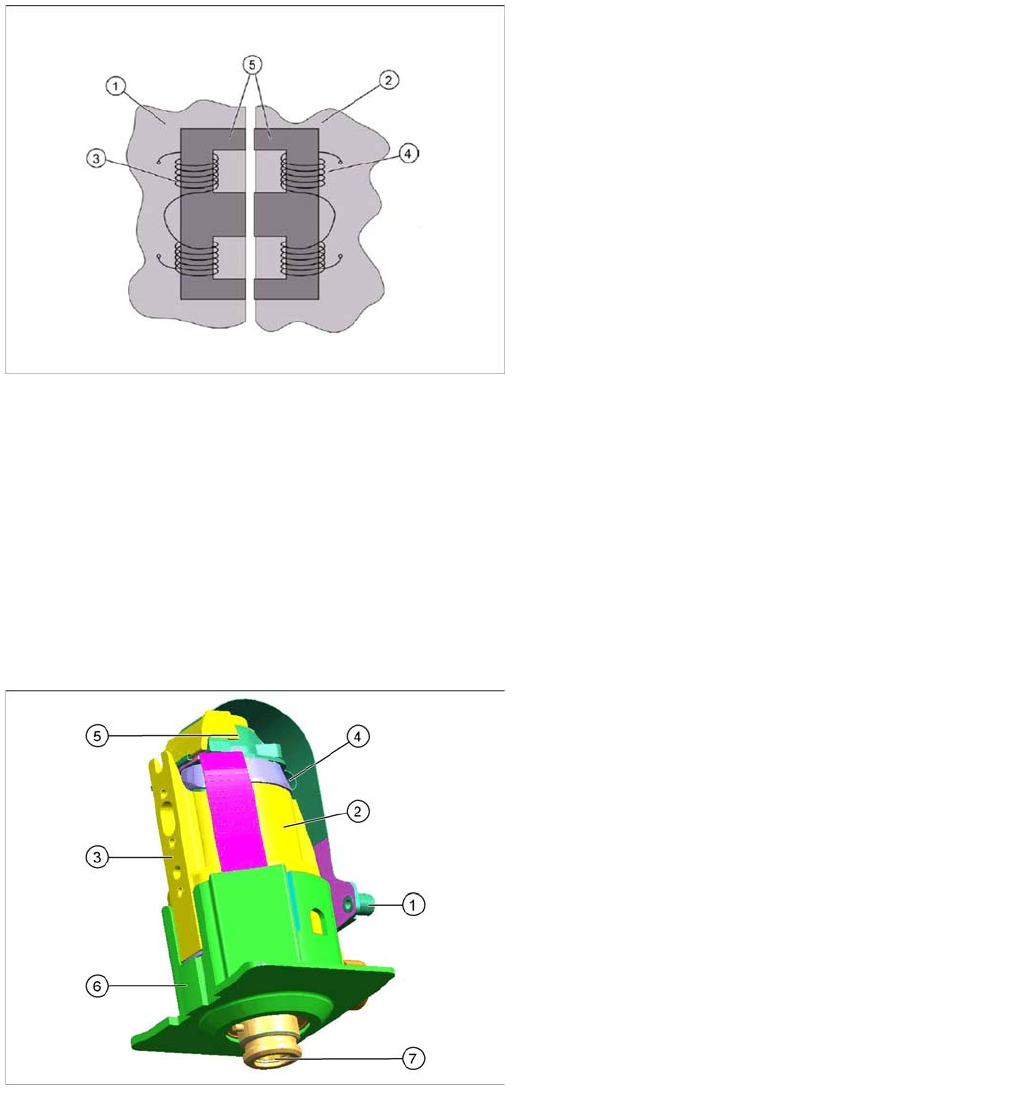
▪ Die Energieübertragung geschieht mit Hilfe eines geteilten Transformators. Die eine Hälfte befindet
sich auf der hinteren Abdeckung des CPP Kopfes (Stator), die andere (Rotor) ist an der Ventilinsel
befestigt.
▪ Auf beiden Transformatorhälften befinden sich Spulen. Eine elektrische Wechselspannung auf der
Stator-Seite induziert ein magnetisches Feld in den Transformatorkern, das wiederum auf der Rotor-
Seite eine elektrische Wechselspannung erzeugt. Diese wird zur Energieversorgung der SCS und
Steuerung der DP-Antriebe verwendet.
▪ Es wird eine Spannung von 24V übertragen.
DP-Antrieb
8.2.7.13 DP-Antrieb
▪ Der DP-Antrieb hat die Aufgabe die Pipette in die richtige Abhollage und das Bauelement in die
richtige Bestücklage zu drehen.
▪ Durch die Motorwelle des DP-Antriebs werden das Vakuum und die Blasluft an der Pipette
bereitgestellt.
▪ Im Servicefall kann der komplette DP-Antrieb sowie die Linearführung getauscht werden.
Legende
1. Rotor
2. Stator
3. Spule (sekundäre Seite)
4. Spule (primäre Seite)
5. Geteilter Transformatorkern aus Ferrit
Legende
1. Der Stecker wird an der Regeleinheit der SCS
gesteckt und verschraubt.
2. Motor
3. Anschraubfläche für die Linearführung
4. Vakuumanschluss
5. Messsystem
Auflösung: 278 digit pro Grad bzw.
100.000 digit pro Umdrehung
6. Kamera-Hintergrund (schwarz) DP-Antrieb
7. Pipettenschnittstelle
Collect-, Pick- und Place-Kopf (CPP)
Übersicht Teileübersicht
291 Student Guide SIPLACE X-Serie und X4I FSE
Funktionsweise d es DP-Antriebs
Funktionsweise des DP-Antriebs
Funktionsweise des Messsystems
Das Messsystem besteht aus eine Glasscheibe mit Inkrementen. Diese Glasscheibe ist fest mit der
Motorwelle verbunden.
Die Leseeinheit wertet die Inkremente aus vervielfacht und digitalisiert diese. Dieser Positions-Ist-Wert
wird vom Regelkreis ständig mit dem vorgegebenen Sollwert verglichen.
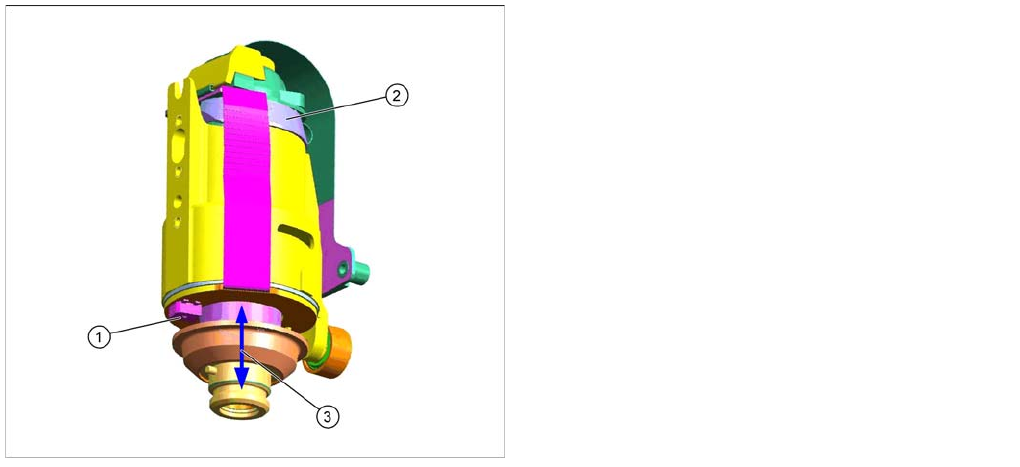
Lichtschranke unten
Jeder DP-Antrieb besitzt seinen eigenen LS_unten-Sensor. Dieser Sensor liefert beim Einfedern der
Z-Achse ein Signal an die Achskarte bzw. HCU. Das Signal der LS_unten ist direkt mit dem Messsignal
des Inkrementalgebers der Z-Achse gekoppelt.
Legende
1. Lichtschranke unten
2. Messsystem
3. Einfederweg zum Betätigen der Lichtschranke unten
Funktionsweise des DP-Antriebs
Die DP-Antriebe werden von der SCS-Platine
entsprechend den Zählimpulsen und den Sollwerten (für
Abholwinkel, Bestückwinkel und Korrekturwinkel nach
Vision) gesteuert.
Die Rückmeldung über die Position des DC-Motors wird
über ein inkrementelles Messsystem überwacht.