00196043-05 - SG X und X4I FSE_de.pdf - 第345页
TwinHead Abhol- und Bestückzyklus beim TwinHead Vorbereitung zum Abholen vom Bauelement (Mod ul 1) 345 Student Guide SIPLACE X-Serie und X4I FSE Vorbereit ung zum Abholen v om Bauelement (Mo dul 1) 9.3.3 Vorbereitung zum…
TwinHead
Allgemeines Abhol- und Bestückzyklus beim TwinHead
Student Guide SIPLACE X-Serie und X4I FSE 344
Abhol- und Bestückzyklus beim TwinHea d
9.3 Abhol- und Bestückzyklus beim TwinHead
Allgemeines
9.3.1 Allgemeines
Bestückprinzip des TwinHead
9.3.2 Bestückprinzip des TwinHead
Das Portal wartet während der LP-Transportzeit an der theoretischen Passmarken-Position, um die
Leiterplattenzentrierung (und Inkpunkt-Erkennung) nach der LP-Klemmung durchzuführen. Mit
"Whispering down the machine" wertet Portal 3 nur noch zwei Passmarken aus.
Der TwinHead holt nun zunächst mit Modul 1 dann mit Modul 2 jeweils ein Bauelement ab.
Anschließend werden diese Bauelemente über der IC-Kamera (FC-Kamera) zentriert und bestückt.
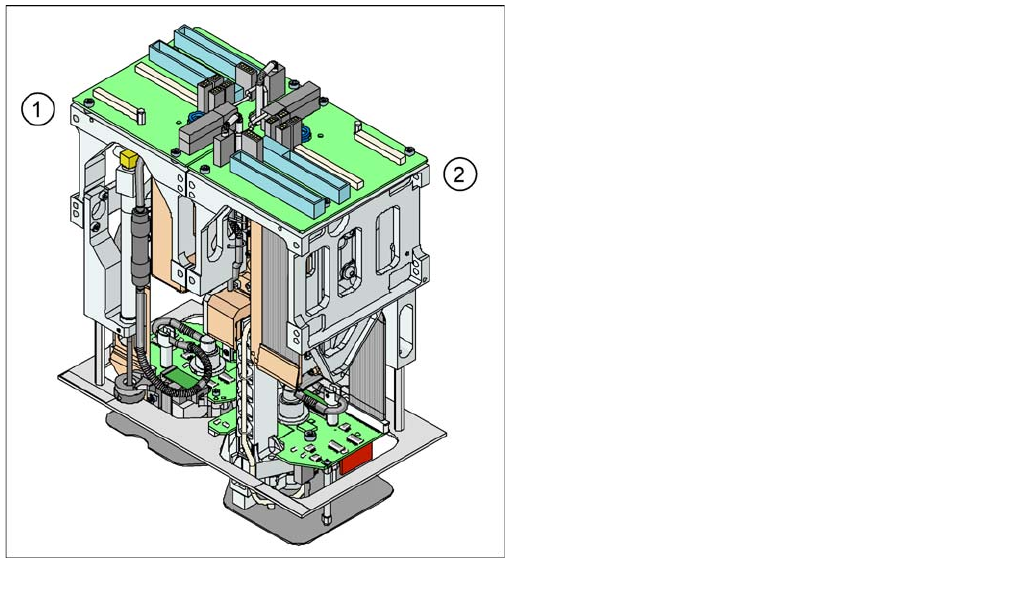
Ansicht TwinHead
Das Modul 2 (2) des TwinHead ist gegenüber
Modul 1 (1) um 180 Grad gedreht montiert.
▪ Der Abstand in X-Richtung zwischen den Pipetten
beträgt ca. 71 mm.
▪ Die maximale Bauteil-Höhe beträgt 25 mm.
▪ Die Aufsetzkraft beim Bestücken kann programmiert
werden von 0.5 N bis 15 N (bei einem Highforce
TwinHead bis 30 N).
▪ Die Winkelgenauigkeit beträgt 0.07 Grad, 4 Sigma/X-
und Y-Achsen 35 µm 4 Sigma .
▪ Die Fähigkeit, Sonderbauelemente zu bestücken
wurde weiter verbessert:
TwinHead
Abhol- und Bestückzyklus beim TwinHead Vorbereitung zum Abholen vom Bauelement (Modul 1)
345 Student Guide SIPLACE X-Serie und X4I FSE
Vorbereit ung zum Abholen v om Bauelement (Mo dul 1)
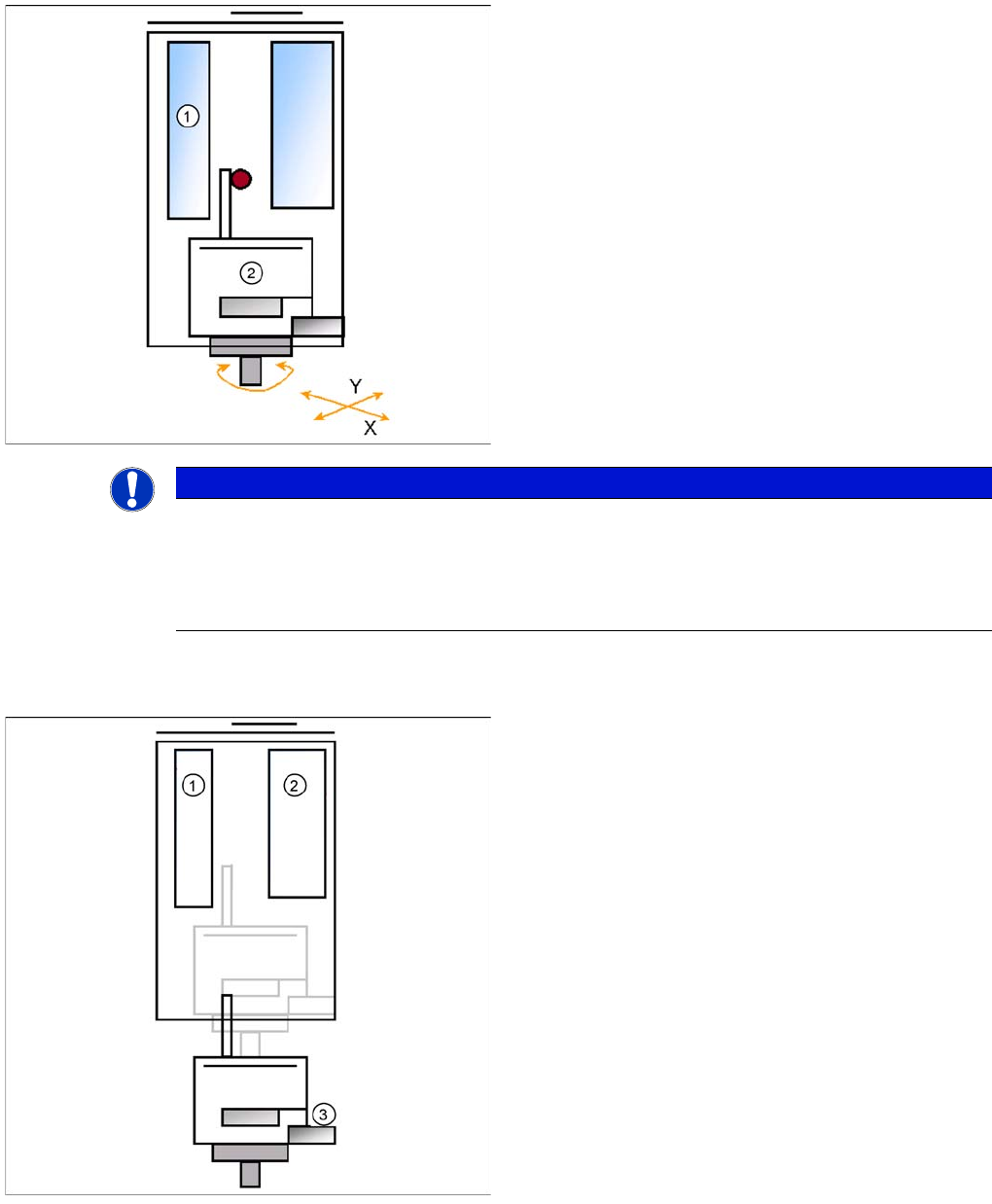
9.3.3 Vorbereitung zum Abholen vom Bauelement (Modul 1)
Abholen des Bauelements (Modul 1)
9.3.3.1 Abholen des Bauelements (Modul 1)
Legende
1. Z-Motor
2. D-Motor
▪ LP-Erkennung und ggf. Inkpunkterkennung wird
durchgeführt.
▪ Die X- und Y-Achsen des Portals verfahren zur Spur
bzw. Abholposition des Zuführmoduls.
▪ Die D-Achse dreht während der Positionierung des
Portals auf den Abholwinkel.
▪ Kommunikation mit BE-Wagen Förderer bereit öffnet
das Abholfenster des Förderers.
HINWEIS
Um eine höhere Bestückgenauigkeit zu erreichen werden bei jeder Leiterplatte die ersten fünf
Bauteile über der IC-Kamera in 0° und 180° zentriert (SW 504). Ab der SW 505 und höher wird
der Offset zwischen der Pipette und IC-Kamera mit Hilfe einer Marke nach einer definierten Zeit
kontrolliert. Die Marke befindet sich auf einer Metallplatte, die zwischen stationärer Kamera und
Maschine befestigt ist
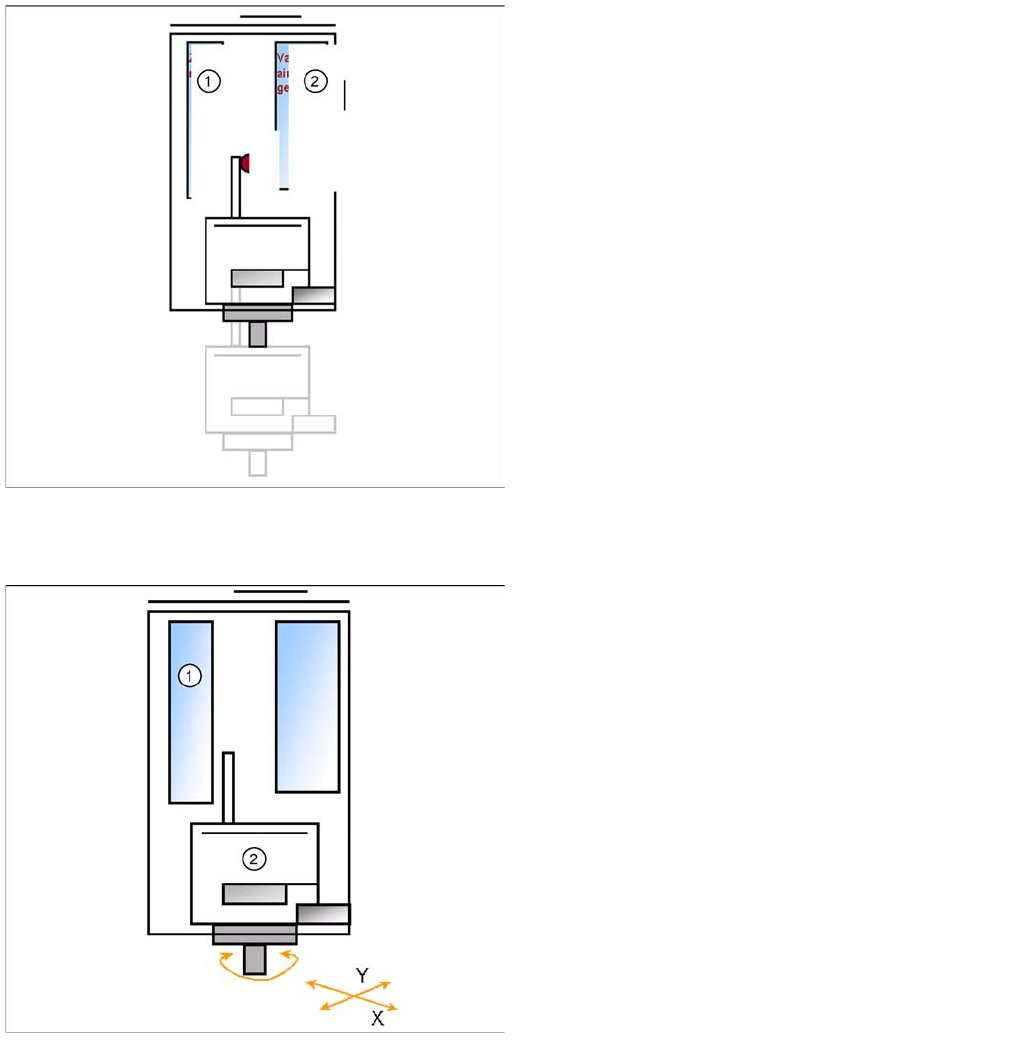
Legende
1. Z-Motor
2. Vakuum-/Blaslufterzeuger
3. Kraftsensor
▪ Z-Achse verfährt abwärts im Standard-Modus (2 N
Abholkraft).
▪ Beim Kontakt mit dem Bauelement wird die
Abholkraft auf den programmierten Wert erhöht.
▪ Bei Erreichen dieses Wertes wird das Ende
Signalausgelöst und die Vakuumüberprüfung
aktiviert.
TwinHead
Vorbereitung zum Abholen vom Bauelement (Modul 2) Abhol- und Bestückzyklus beim TwinHead
Student Guide SIPLACE X-Serie und X4I FSE 346
Vorbereit ung zum Abholen v om Bauelement (Mo dul 2)
9.3.4 Vorbereitung zum Abholen vom Bauelement (Modul 2)
Legende
1. Z-Motor
2. Vakuum-/Blaslufterzeuger
▪ Die Z-Achse verfährt aufwärts im Standard-
Verfahrprofil.
▪ Kommunikation mit BE-Wagen Förderer weitertakten
sobald die Z-Achs- Position "Sicherheitshöhe"
erreicht ist.
▪ Beim Endesignal Z-Achse oben wird die
Vakuumüberprüfung Bauelement an Pipette
durchgeführt.
▪ Die D-Achse wird auf den Bestückwinkel (damit nach
dem zentrieren nur noch der Korrekturwinkel des BEs
zu drehen ist).
▪ Vorbereitung zum weiteren Abholen (BE an
Modul 2).
Legende
1. Z-Motor
2. D-Motor
Der Abholvorgang für Modul 1 ist beendet.
▪ Die X- und Y-Achsen des Portals verfahren zur Spur
bzw. Abholposition des Zuführmoduls.
▪ Die D-Achse von Modul 2 dreht während der
Positionierung des Portals auf den Abholwinkel.
▪ Kommunikation mit BE-Wagen Förderer bereit öffnet
das Abholfenster des Förderers.