00196043-05 - SG X und X4I FSE_de.pdf - 第468页
Kalibrierung Transportwangen Maschinenpositionen teachen Student Guide SIPLACE X-Serie und X4I FSE 468 Die LP-Kamera mißt die Bestückgen auigk eit anhand der 4 Kalibrierte ilmarken an der Kalibrierteiloberseite. Mit dies…
Kalibrierung
Grundsätzliche Erläuterung der Kalibrierschritte LP-Mapping
467 Student Guide SIPLACE X-Serie und X4I FSE
▪ Jedes Pipettenmagazin besitzt eine Passmarke (Bohrung), die zu Beginn des Kalibrierablaufs
angefahren und erkannt werden.
▪ Danach werden die beiden Passmarken (Bohrungen) der Halterung rechts und links angefahren
rechts angefahren und erkannt.
▪ optional kann nun die Abholhöhe des Pipettenwechslers kalibriert werden.
▪ optional kann nun die Abwurfposition des Pipettenwechslers kalibriert werden. Diese Position wird
im Betrieb beim Abwerfen defekter Pipetten angefahren.
Vakuum geschlossen kalibrieren:
12.4.7.6 Vakuum geschlossen kalibrieren:
Bei dieser Funktion wird auf der festen Transportwange mit der 518er Pipette der Wert bei
geschlossenem Vakuumsystem für Segment 1 und 2 ermittelt.
LP-Mapping
12.4.8 LP-Mapping
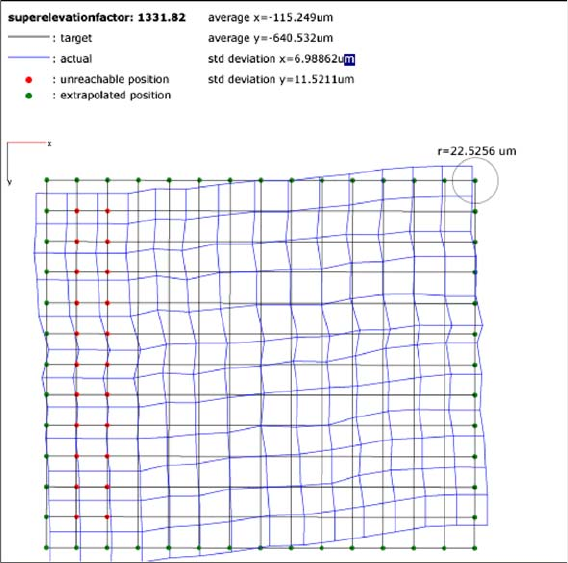
Beim LP-Mapping wird die Rechtwinkligkeit der X- und Y-Achsen zueinander mit der LP-Kamera für alle
Portale und Transportspuren vermessen.
Damit wird auch ein Bezug zur Position des Transportsystems zum Portalsystem hergestellt. Hierzu
werden mit der LP-Kamera Passmarken-Kreuze auf einer hochpräzisen Glasplatte vermessen.
Diese Mappingplatte wurde in einer Messmaschine vermessen, das Vermessungsprotokoll wird
während des Mappingvorganges berücksichtigt.
Ergebnisse des Mappingvorgangs
Die Ergebnisse werden in einer XML-Datei für jedes Portal und jede Transportspur gespeichert.
Kopf-Map ping
12.4.9 Kopf-Mapping
Mit dem Kopf-Mapping wird die Linearität der X- und Y-Linearführungen des C&P-Kopfes gemessen,
d. h. die Verdrehung des Portals in sich wird hier kompensiert.
Der C&P-Kopf bestückt das Kalibrierteil auf vorgegebene Sollpositionen der Mappingplatte. Die LP-
Kamera misst die Bestückgenauigkeit dieser Bestückungen für den gesamten Bearbeitungsbereich.
Das Kalibrierteil wird nach jedem Messvorgang mit der BE-Kamera neu vermessen und danach wird die
nächste Sollposition auf der Mappingplatte angefahren.
Kalibrierung
Transportwangen Maschinenpositionen teachen
Student Guide SIPLACE X-Serie und X4I FSE 468
Die LP-Kamera mißt die Bestückgenauigkeit anhand der 4 Kalibrierteilmarken an der
Kalibrierteiloberseite. Mit diesem Mapping wird ein im Bestückbereich positionsabhängiger Offset zum
bestehenden Kopf-Offset ermittelt.
Transportwangen
12.4.10 Transportwangen
Beim modularen Transport sind alle Transportwangen einstellbar. Zur Einstellung der Transportwangen
wird ein Schrittmotor eingesetzt, der über einen Zahnriemen die Stelleinheit antreibt. Die Position der
Tranportwangen wird über einen BERO erkannt, daher gibt es nun für jede Transportwange einen
Schaltpunkt. Mit der Kalibrierung werden die Schaltpunkte für den gesamten Verfahrbereich der
Breitenverstellung optimiert. Die Kalibrierung ist notwendig, um sicherzustellen, dass alle drei
Stellantriebe die Transportwangen parallel verschieben.
Automatischer Ablauf (Transport Mapping):
▪ Der Stellantrieb wird initialisiert und bewegt die Transportwange zur rechten Seite (Endschalter).
▪ Der Stellantrieb erkennt die feste(n) Transportwange(n) (zwei beim Doppeltransport) und verfährt
die einstellbare(n) Transportwange(n) in die Standardposition von 55 mm.
▪ Der Stellantrieb verfährt die Transportwange(n) schrittweise (10 mm Schritte) und bestimmt den
Offset der Schaltpunkte der drei Stellantriebe in den verschiedenen Transportwangenpositionen.
▪ Diese Kalibrierung erfolgt von links nach rechts und zurück.
▪ Die Ergebnisse werden als Korrekturwerte auf der TSP 301 gespeichert und beim Einstellen und
Messen der Transportbreite berücksichtigt.
Transportbreite kalibrieren
12.4.11 Transportbreite kalibrieren
Der Offset der Transportbreite wird mit einer beliebig breiten Leiterplatte bestimmt. Die Breite der
Leiterplatte wird manuell eingegeben und die aktuelle Breite des Transports bestimmt. Die Differenz wird
als Offset intern berücksichtigt.
Maschine npositionen teachen
12.5 Maschinenpositionen teachen
HINWEIS
Die Kalibrierung muss für Spur 1 und Spur 2 durchgeführt werden.
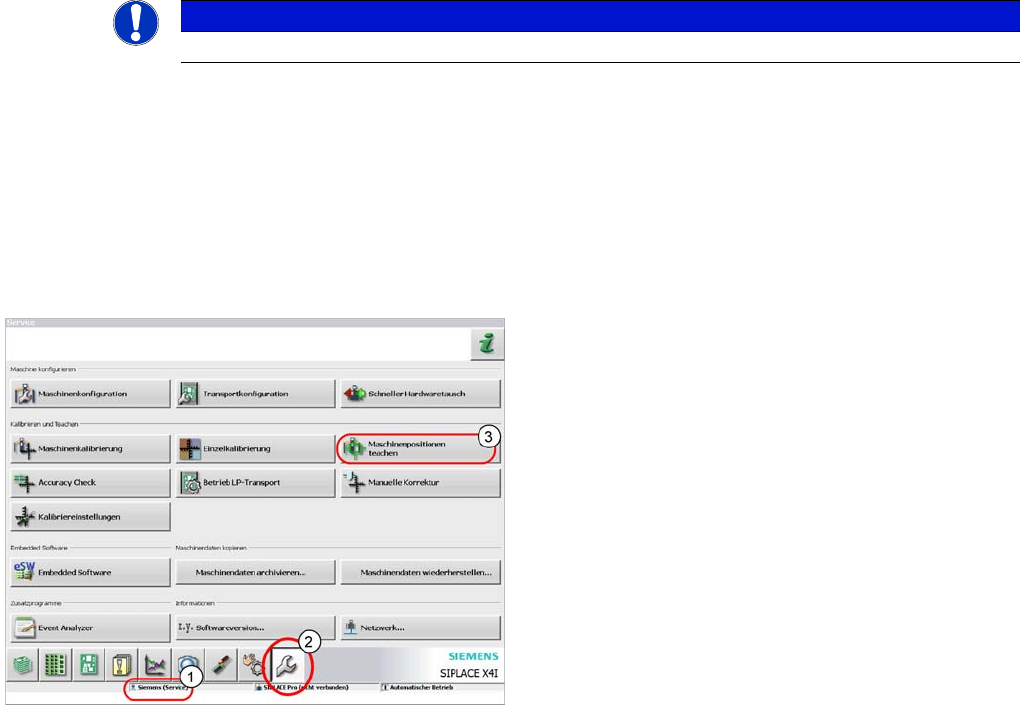
Die Funktion Maschinenpositionen teachen kann mit den
Bedienerleveln Machine-Service (1) oder SIPLACE-
Service ausgeführt werden.
Vorrausetzung ist ein erfolgreicher Gesamtreferenzlauf
der Maschine.
► Wechseln Sie ins Service-Menü (2).
► Wählen Sie den Button Maschinenpositionen
teachen (3) um den Assistenten zu starten.
Kalibrierung
Maschinenpositionen teachen Allgemeiner Ablauf
469 Student Guide SIPLACE X-Serie und X4I FSE
Allgemeiner Ablauf
12.5.1 Allgemeiner Ablauf
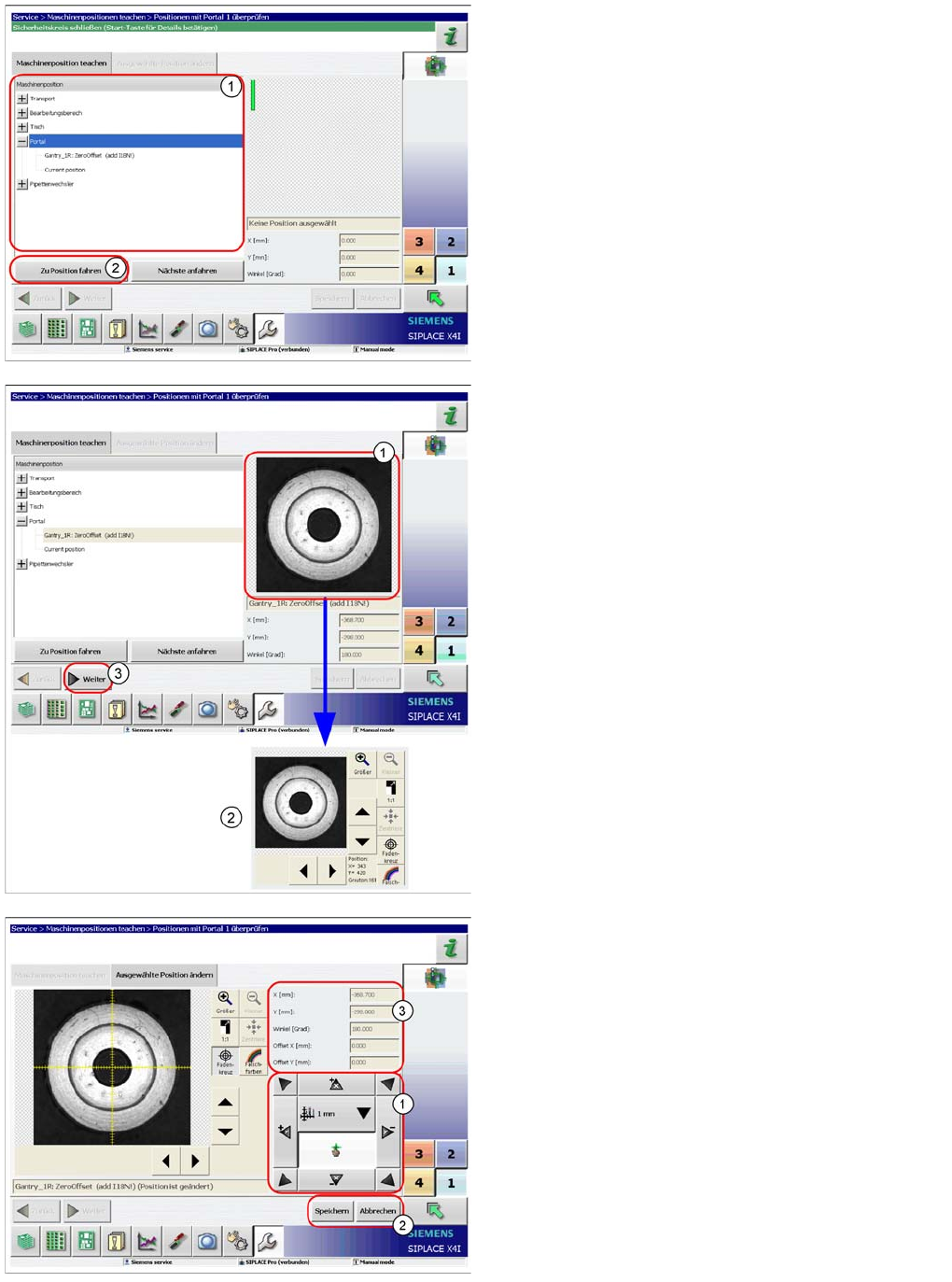
Die Maschinenpositionen sind unterteilt in folgende
Positionen:
▪ Transport
▪ Bearbeitungsbereich
▪Tisch
▪Portal
▪ Pipettenwechsler
► Wählen Sie die zu teachende Position aus (1).
► Drücken Sie den Button Zur Position
fahren (2).
Die Maschinenposition wird angefahren.
► Durch einen Klick auf das Markenfenster (1)
erscheinen weitere Funktionen (2), wie z. B.
Markenfenster verschieben oder zentrieren.
► Drücken Sie den Button Weiter (3) um die Marke
(Position) zu teachen.
► Wählen Sie die Schrittweite und teachen Sie das
Portal, so dass die LP Kamera mittig über der Marke
steht (1).
► Drücken Sie den Button Speichern (2).
Das Feld (3) zeigt die Sollwerte aus den MA-Daten und
den geteachten Offset.