3OM-1050-002.pdf - 第242页
*7 Feeder carriage connection 1-2 [mm], 2-3 [mm], 3-4 [mm] This is the offset data used to adjust the space between the two feeder carriages when connected. Reserved Data *8 Feeder carriage 1 X (Horizontal) [mm], Y (V er…
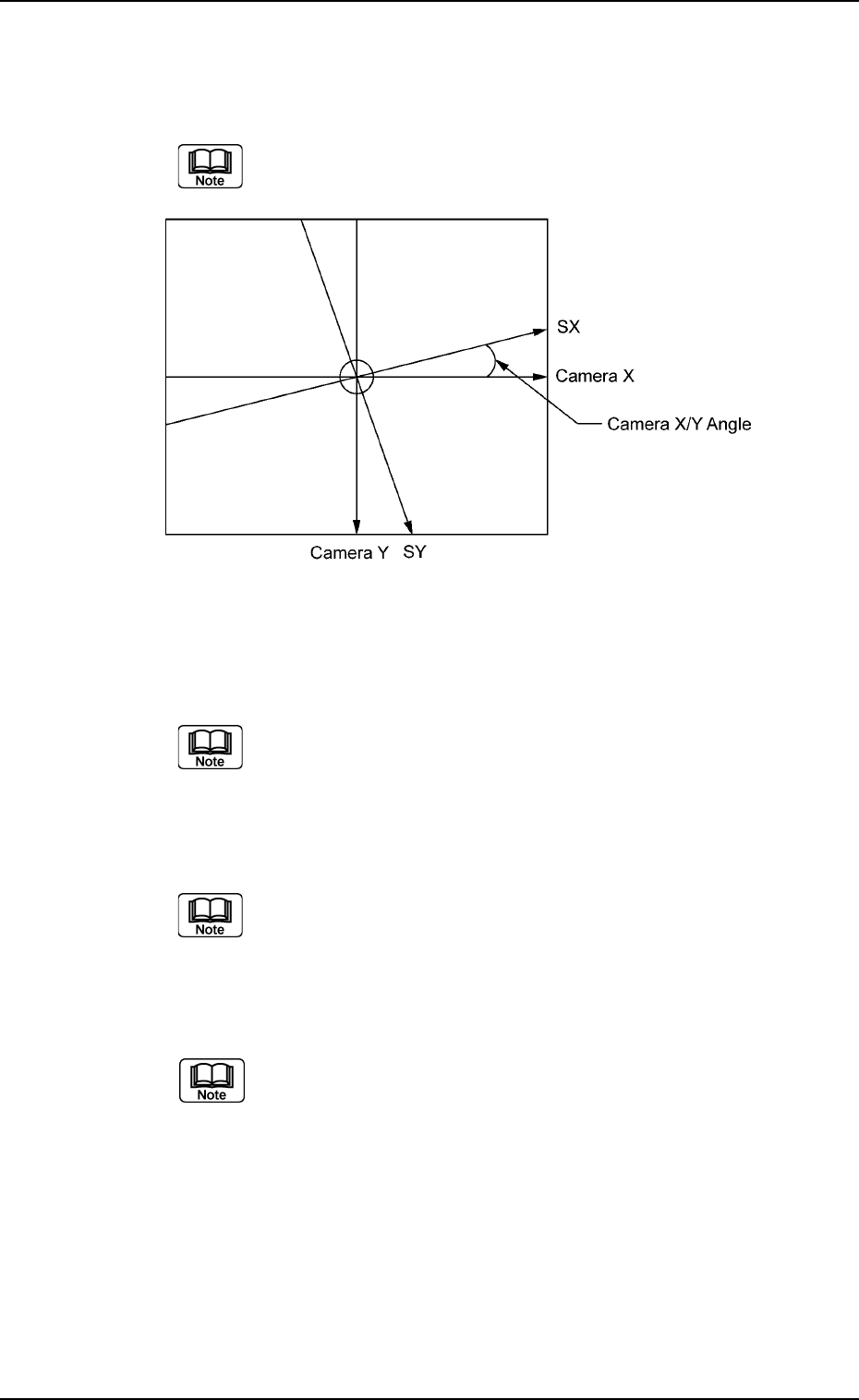
*2 Camera X [deg], Y [deg]
This is the offset data for angle difference between the camera X
and Y axis and the scanning coordinates X and Y of the component
recognition camera (Camera 1: high magnification).
The parameters are computed using the jig nozzle.
Fig. 3E13
*3 Component pickup (Z) axis [mm]
This is the offset data for the origin position of the component pickup
Z axis (CZ).
A plus (+) value increases the downward movement of the
nozzle.
*4 Component placement (Z) axis [mm]
This is the offset data for the origin position of the component place-
ment Z axis (MZ).
A plus (+) value increases the downward movement of the
nozzle.
*5 P.C.B. transfer
Left [mm], Right [mm]
This is the offset data to adjust the feed limit at P.C.B. transfer.
This offset data is used for fine adjustment of the transfer
stroke.
*6 Master nozzle
H [mm], L-L [mm], L-X [mm], L-Y [mm]
Entered are the nozzle parameters that were measured using the
master nozzle.
H:Height (H Level)
L-L : Height (L Level)
L-X : X in L Level
L-Y : Y in L Level
0307-006 5-13
AFO01EDTP
3.2 "Device Offset" Tab
*7 Feeder carriage connection
1-2 [mm], 2-3 [mm], 3-4 [mm]
This is the offset data used to adjust the space between the two
feeder carriages when connected.
Reserved Data
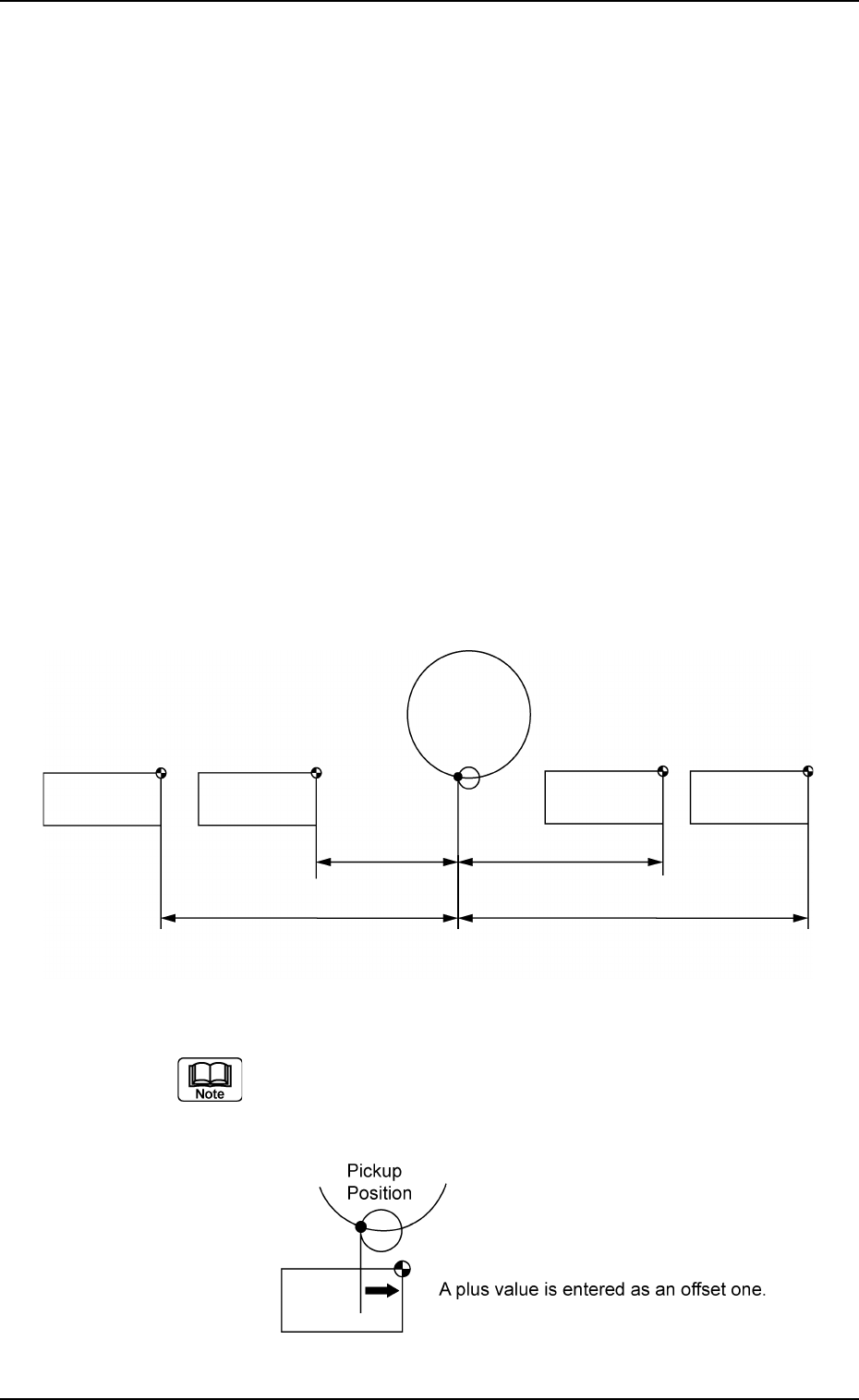
*8 Feeder carriage 1 X (Horizontal) [mm], Y (Vertical) [mm], L
(Height) [mm],
Feeder carriage 2 X (Horizontal) [mm], Y (Vertical) [mm], L
(Height) [mm],
Feeder carriage 3 X (Horizontal) [mm], Y (Vertical) [mm], L
(Height) [mm], and
Feeder carriage 4 X (Horizontal) [mm], Y (Vertical) [mm], L
(Height) [mm]
This is the offset data used to adjust the positional distances be-
tween the component pickup position and the feeder carriages.
X [mm] (Horizontal) : Horizontal Position Data
Y [mm] (Vertical) : Vertical Position Data
L [mm] (Height) : Pickup Height Position Data
Fig. 3E14
Plus parameters entered in these text boxes increase the
travel of the feeder carriages in the "Fdr. No." direction from
the component pickup position.
Fig. 3E15
0307-006 5-14
AFO01EDTP
3.2 "Device Offset" Tab
Feeder Carriage #3
FDR. 301 at Origin
Pickup
Position
Feeder Carriage #2
FDR. 201 at Origin
Feeder Carriage #4
FDR. 401 at Origin
Feeder Carriage #1
FDR. 101 at Origin
#4
#3 #2
#1
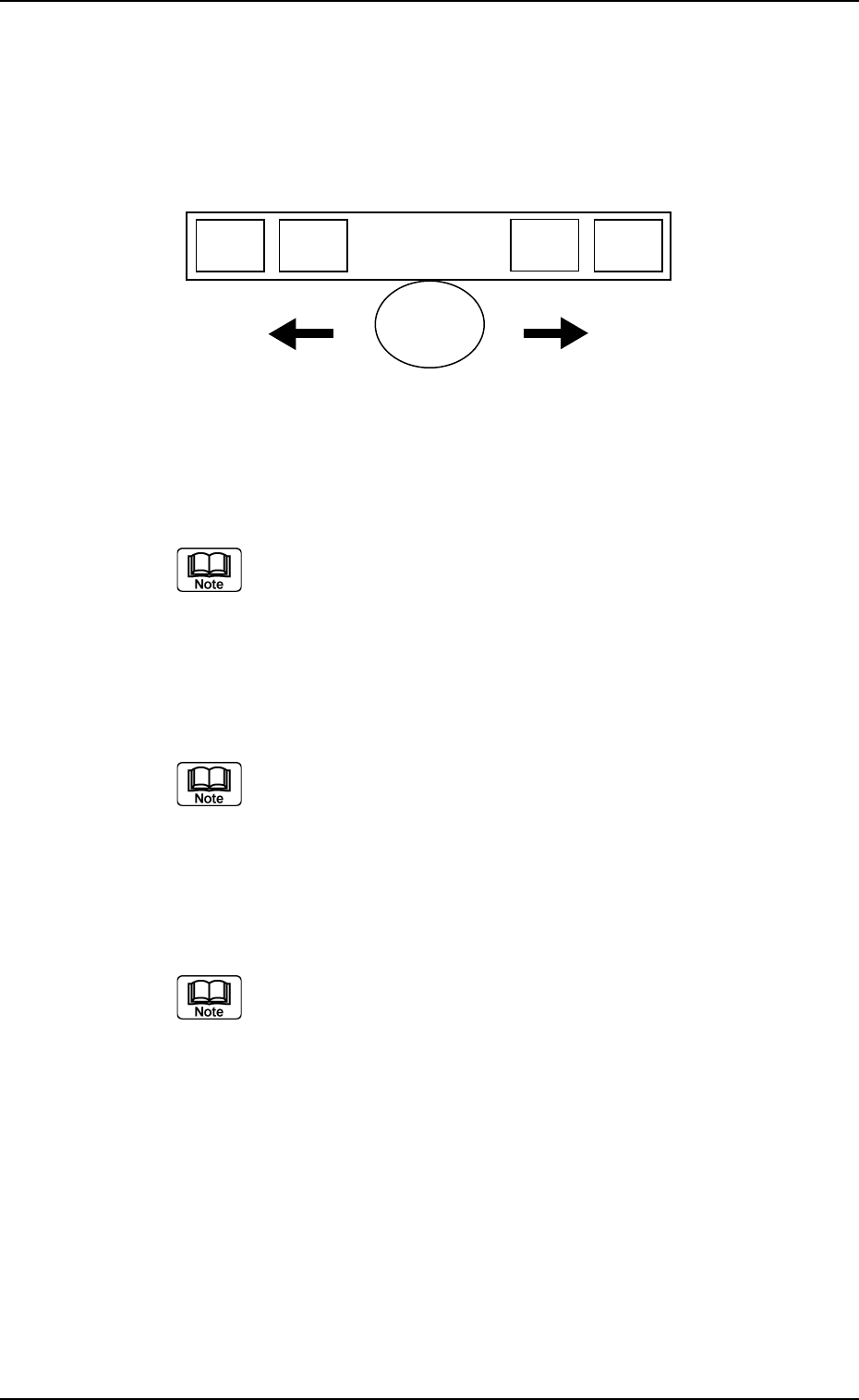
*9 Feeder standby position
F1 [mm], F2A [mm], F3B [mm], F2B [mm], F3A [mm], F4 [mm],
Shown are the offset values (differences between the values of the
feeder standby position and the actually measured values of the
feeder axis origin position.
Fig. 3E16
*10 Input conveyor width [mm]
This is the offset value indicating the difference between P.C.B. Di-
mension Y and the actually measured conveyor width.
The actual value is measured after the conveyor width is
changed when the clearance data and device offset are
regarded as "0" (zero).
*11 Output conveyor width [mm]
This is the offset value indicating the difference between P.C.B. Di-
mension Y and the actually measured conveyor width.
The actual value is measured after the conveyor width is
changed when the clearance data and device offset are
regarded as "0" (zero).
*12 X/Y table chute width [mm]
This is the offset value indicating the difference between the chute
width of the X/Y table and the actually measured value.
(a) Measure the actual value at the P.C.B. outlet/input sec-
tions (fixed sections). Do not perform the measure-
ment at the roller position of the slide block.
(b) The actual value should be measured after the con-
veyor width is changed when the clearance data and
device offset are regarded as "0" (zero).
0307-006 5-15
AFO01EDTP
3.2 "Device Offset" Tab
F4
F3
F2
F1
(+)
(-)