3OM-1050-002.pdf - 第88页
(2) Creation of Operation Data • P .C.B. Data Follow the same procedure as described in "3.1 Single Pattern". • P .E.C. Recognition Data T able 3B26 P .E.C. recognition function Enable P .E.C. recognition mode …
3.4 Repetitive Patterns (Unit P.C.B. B.B.R. Enabled)
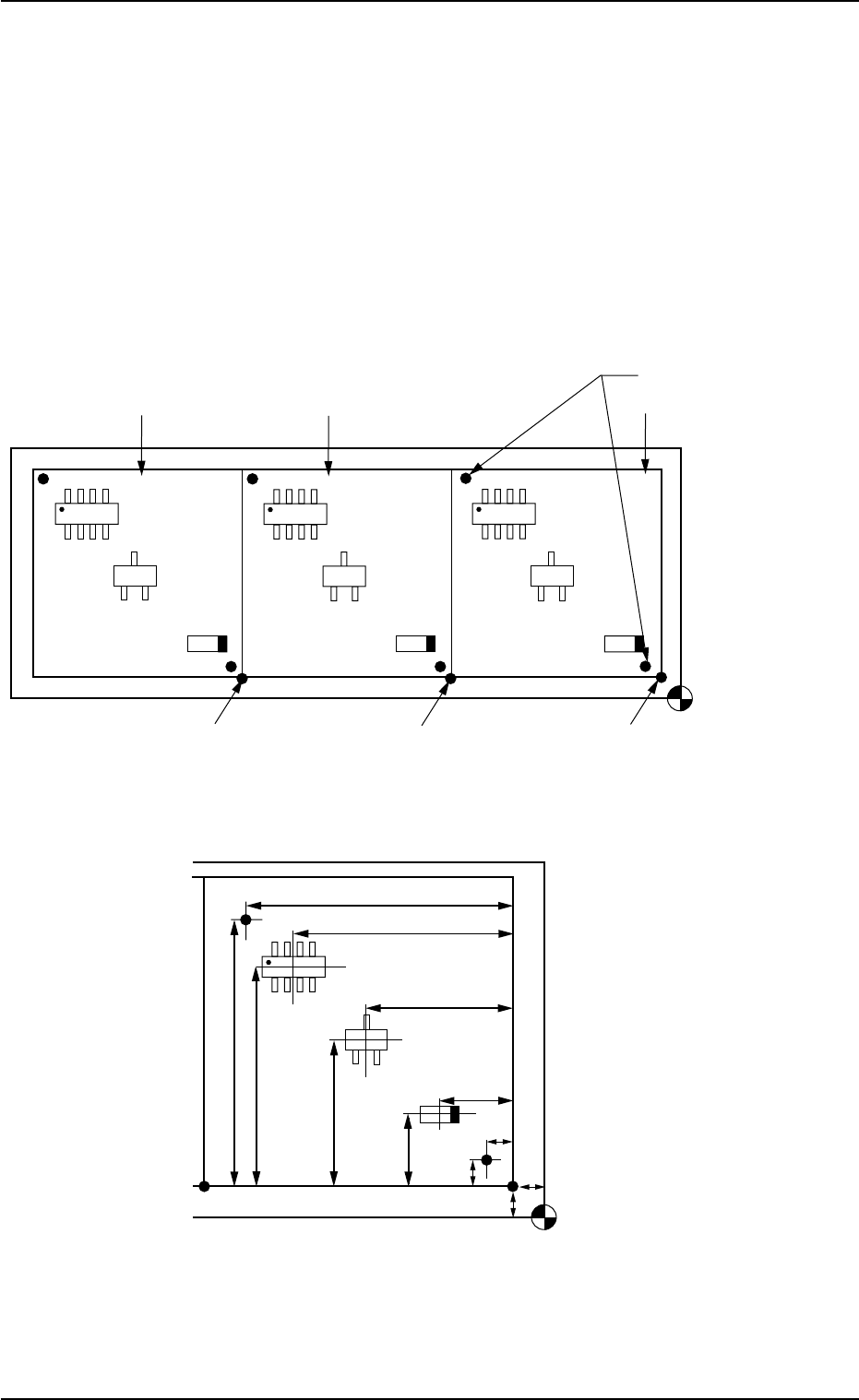
(1) Information on Pattern Program Creation
• P.C.B. Size, Packaged Posture and IDs of Components, and Fi-
ducial Marks
Follow the same procedure as described in "3.1 Single Pattern".
• Placement Coordinates & Angles and Coordinates of Recogni-
tion Marks
Fig. 3B123 General View
Fig. 3B124 Pattern 1 (Magnified View)
Placement Coordinate
Reference Point
(OX
1
, OY
1
)
(OX
2
, OY
2
)
Pattern Origin (OX
3
, OY
3
)
Pattern 1
Pattern 2
Pattern 3
Fiducial Marks
Placement Coordinate
Reference Point
X
3
Y
3
X
2
Y
2
X
1
OX
1
Y
1
OY
1
FX
1
FY
1
FY
2
FX
2
0110-003 2-6 6 AFO01EDTP
3.4 Repetitive Patterns (Unit P.C.B. B.B.R. Enabled)
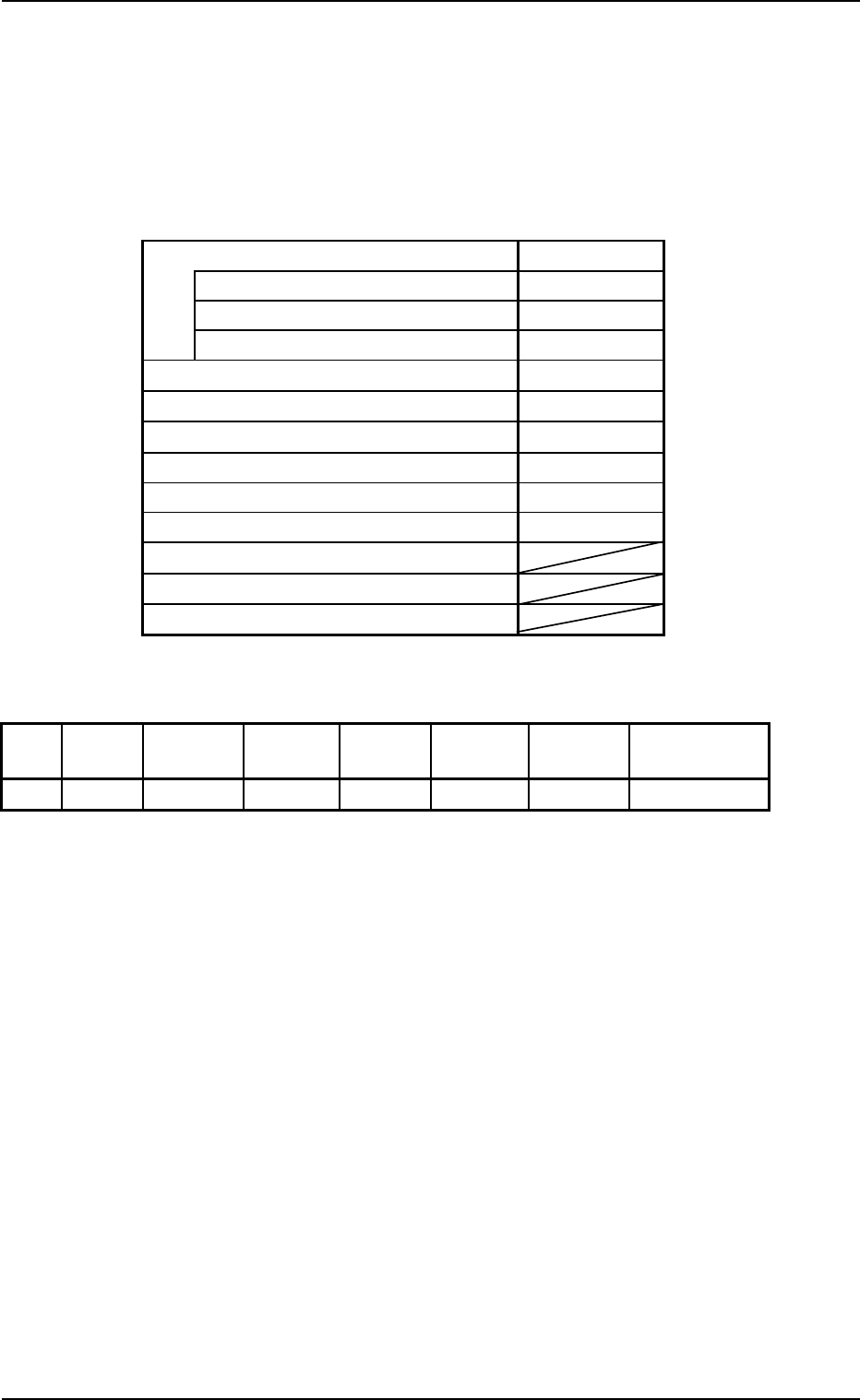
(2) Creation of Operation Data
• P.C.B. Data
Follow the same procedure as described in "3.1 Single Pattern".
• P.E.C. Recognition Data
Table 3B26
P.E.C. recognition function Enable
P.E.C. recognition mode global Disable
P.E.C. recognition mode image Enable
P.E.C. recognition mode local Disable
Fiducial mark #1 X location [mm] 0.000 [mm]
Fiducial mark #1 Y location [mm] 0.000 [mm]
Fiducial mark #1 Mark # 1
Fiducial mark #2 X location [mm] 0.000 [mm]
Fiducial mark #2 Y location [mm] 0.000 [mm]
Fiducial mark #2 Mark # 1
Fiducial mark #3 X location [mm]
Fiducial mark #3 Y location [mm]
Fiducial mark #3 Mark #
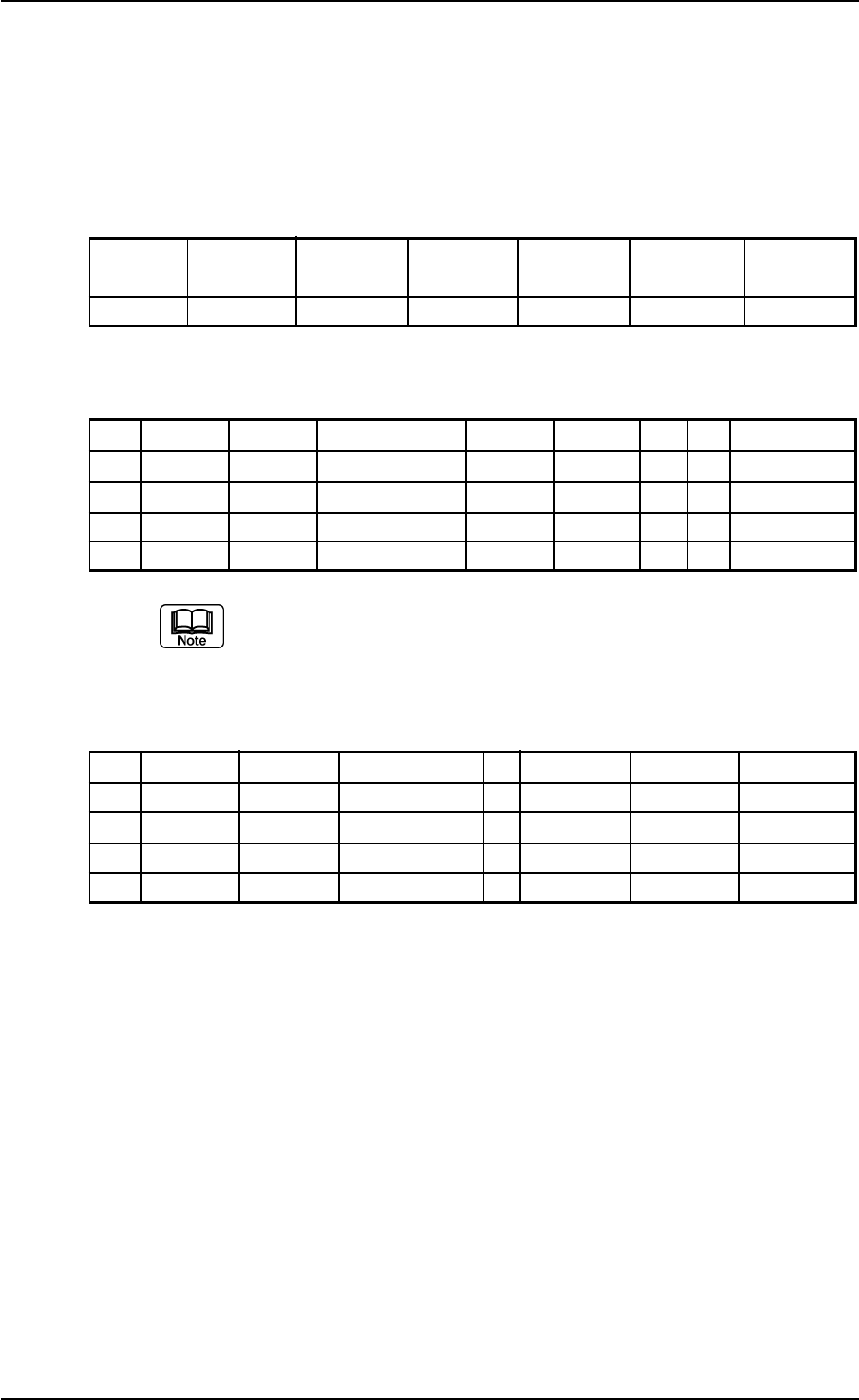
• P.E.C. Recognition Mark Data
Table 3B27
Mark #
Mark Mark Size Mark Size Window
Mark Image Mark Level Recog Algo
Type D1 [mm] D2 [mm] Size [mm]
1 Round 1.00 0.00 5.0 Bright High Pattern
• Setup Data
Create this data when the automatic setup function should be used.
(3) Creation of Placement Feeder Location Data
Follow the same procedure as described in "3.1 Single Pattern".
0307-006 2-67
AFO01EDTP
3.4 Repetitive Patterns (Unit P.C.B. B.B.R. Enabled)
(4) Placement Data (P-data) U01
• Unit Control
Follow the same procedure as described in "3.1 Single Pattern".
• Unit P.C.B. B.B.R.
Table 3B28
Unit P.C.B. Recog Coord Recog Coord Recog Coord Recog Coord Fiducial Mark Fiducial Mark
B.B.R. X1 [mm] Y1 [mm] X2 [mm] Y2 [mm] FM1 FM2
Enable FX
1
FY
1
FX
2
FY
2
11
• Placement Data (P-data)
Table 3B29
P-No. X [mm] Y [mm] Z
= =
= =
= theta [deg
]]
]]
] H [mm] Fdr. No. V C Comment
1 X
1
Y
1
+000.00 +0.000 101 00 -
2 X
2
Y
2
+090.00 +0.000 103 00 -
3 X
3
Y
3
+180.00 +0.000 105 00 -
4 +000.000 +000.000 +000.00 +0.000 000 00 P
Set "P" or "Q" as a control command in the last line (last step
No.).
(5) Creation of Placement Data (O-data) U01
Table 3B30
O-No. X [mm] Y [mm] Z = theta [deg] C Comment B-X [mm] B-Y [mm]
1 OX
1
OY
1
+000.00 - +000.000 +000.000
2 OX
2
OY
2
+000.00 - +000.000 +000.000
3 OX
3
OY
3
+000.00 - +000.000 +000.000
4 +000.000 +000.000 +000.00 E +000.000 +000.000
0210-005 2-68 AFO01EDTP
3.4 Repetitive Patterns (Unit P.C.B. B.B.R. Enabled)