N7201A652E.pdf - 第462页
NPM- TT2 EJM1E E-MB-05O-05 5-3-8 Machine parame- ter Con v ey or origin of fset ch e ck A A B B Checking origin offset Checking PCB stop position offset A A You can check conveyor origin offset (ca libration result) and …
NPM-TT2 EJM1EE-MB-05O-05
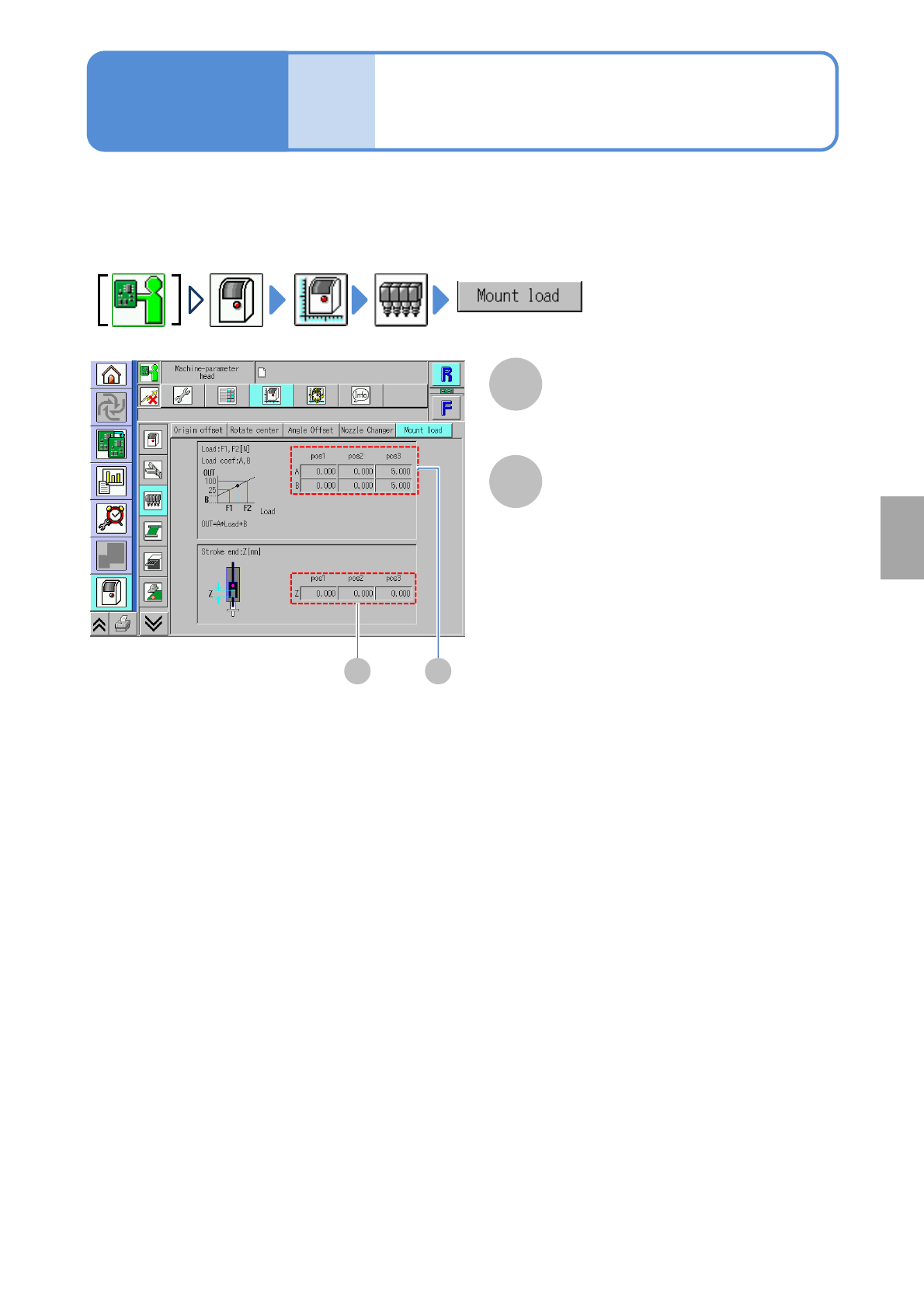
You can check the coefficient to apply the placement load of the head set in Load teaching
(→[Maintenance] P. 12-8-1 ).
●It is available only for 3-nozzle head.
5-3-7
Machine
parame-
ter
Head placement load
coefficient check
A
AB
B
Operating procedure
5-3-7
Load coef
Load coefficients A and B per nozzle
position.
Stroke end
Stroke end per nozzle position.
System
administration
NPM-TT2 EJM1EE-MB-05O-05
5-3-8
Machine
parame-
ter
Conveyor origin offset
check
A
A
B
B
Checking origin offset
Checking PCB stop position offset
A
A
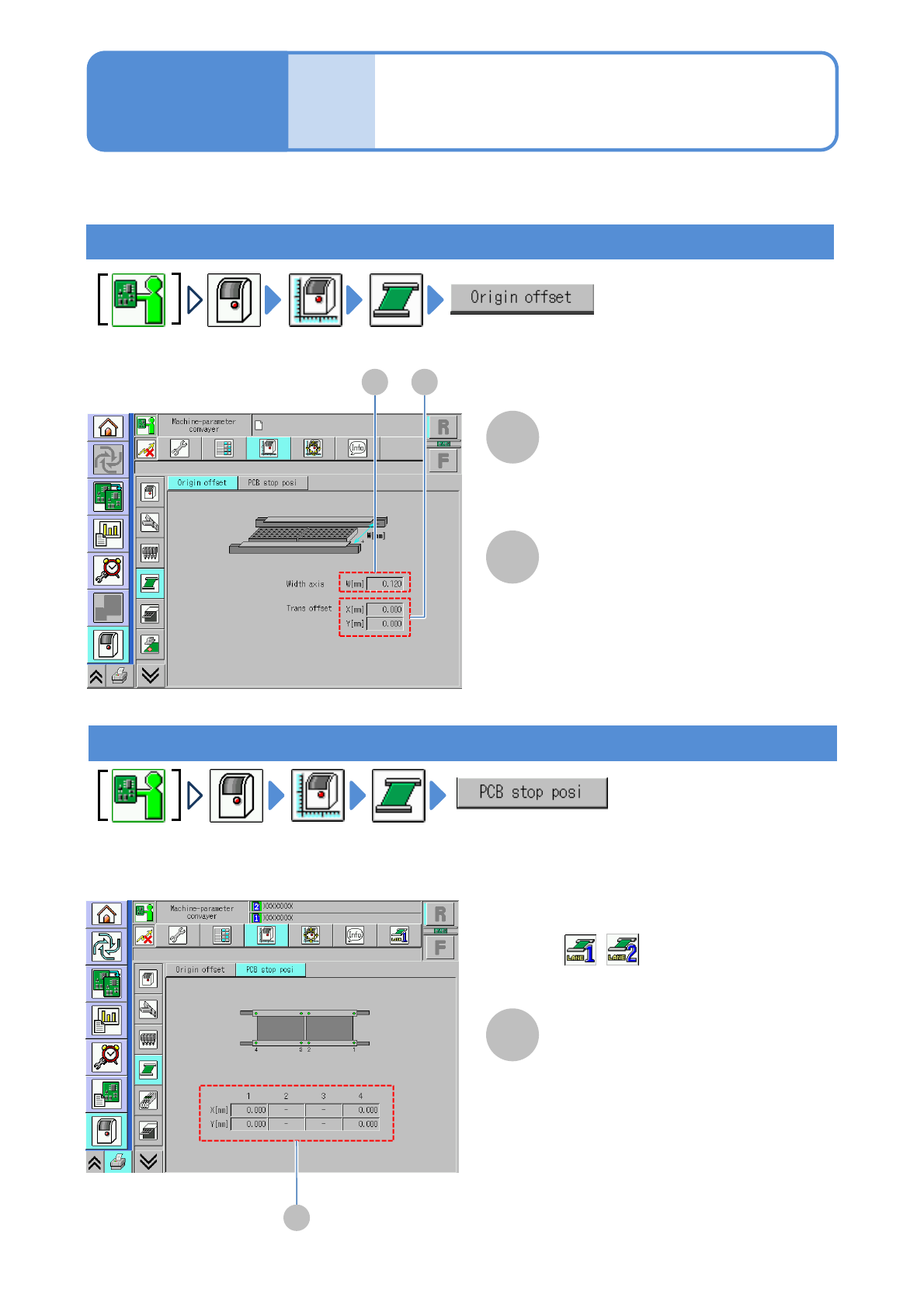
You can check conveyor origin offset (calibration result) and PCB stop position offset.
●For dual conveyor, you need to choose a lane in advance.
Operating procedure
5-3-8
Width axis
Conveyor width offset.
Trans offset X[mm]/Y[mm]
Offset to calibrate an error occurring in
conveyor unit assembly.
PCB stop position offset
X[mm]/Y[mm]
■For dual conveyor
(Select a lane in advance)
NPM-TT2 EJM1EE-MB-05O-05
5-3-9
Machine
parame-
ter
Head camera offset
check
設備に設置されているフィーダーのメモリー情報を表示します。
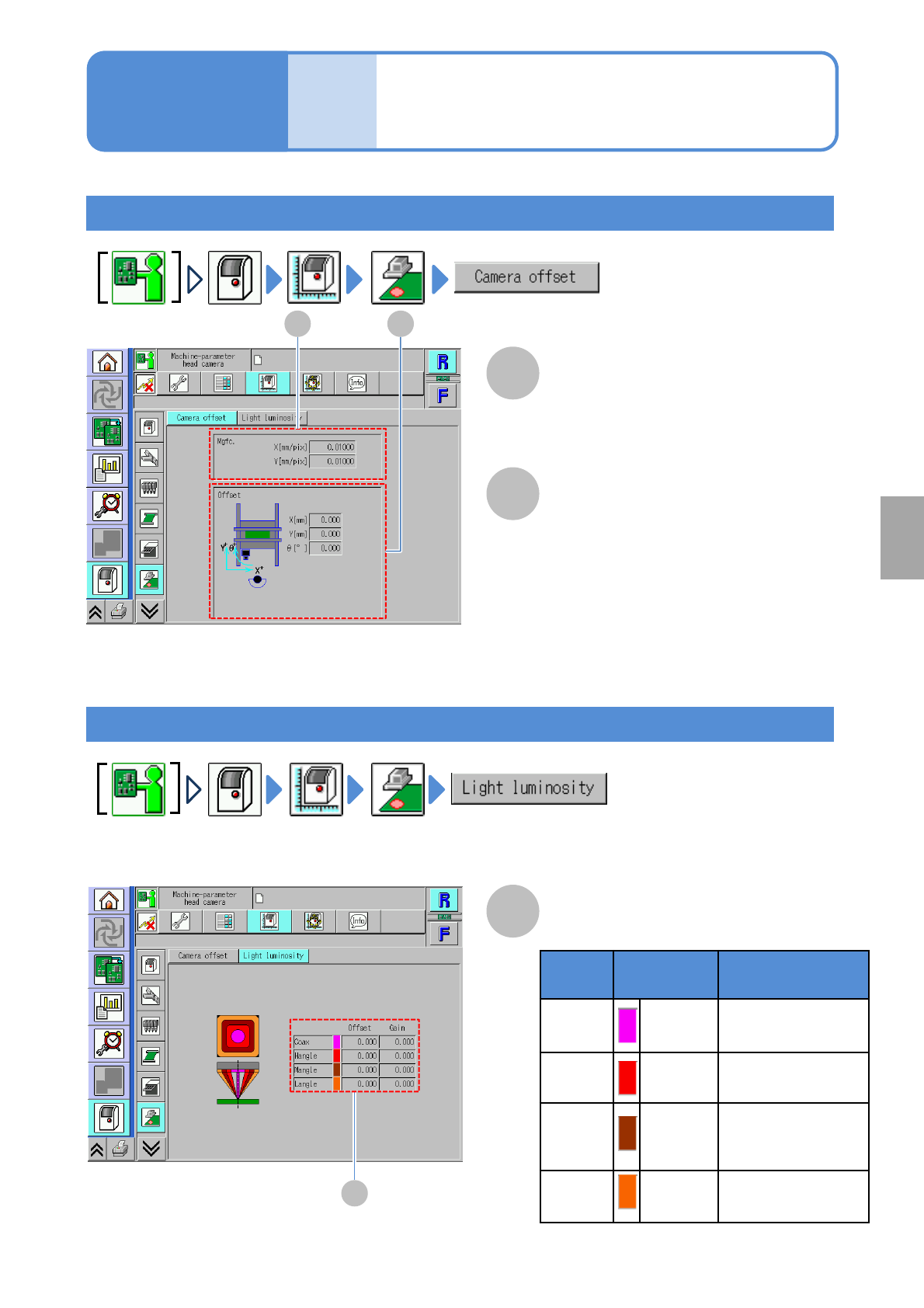
Checking magnification and offset
Checking light luminosity
A
A
A
A
B
B
Light
type
Color Description
Coax Peach
Luminosity offset
of coaxial light.
Hangle Red
Luminosity offset
of high angle light
Mangle Brawn
Luminosity offset
of medium angle
light
Langle Orange
Luminosity offset
of low angle light
Operating procedure
5-3-9
Mgfc. X[mm/pix]/Y[mm/pix]
Magnification of the head camera set to
the recognition device.
●Used in calculating PCB recognition.
Offset X[mm]/Y[mm]/ θ[°]
Offset of position that moves when
recognizing with the recognition camera.
Light luminosity offset
System
administration