KE-3010A_20VA_20VRA使用说明书.pdf - 第47页
第 1 部 基本篇 第 1 章 装置概要 1-27 注 7 :为在激光测定的横断面精度。 注 8 :在同一贴片点反复时的精度。 贴片精度的定义:在夹具基板上最低贴片 6 个。测定标准,为在夹具基板上的元件定位标记,从各 个测定基准起的绝对值在精度范围内。 注 9 :通用图像的贴片精度,受元件特性及照明条件影响,精度差别较大。 例> 把 1005 电 阻芯片作为通用图像元件识别时,贴片精度为 ± 50 μ m(3 σ ) ,需要注意下列几…
第 1 部 基本篇 第 1 章 装置概要
1-26
注 1: 图像识别校正时的精度,是指从元件基准标记、或基板基准标记起的绝对值。
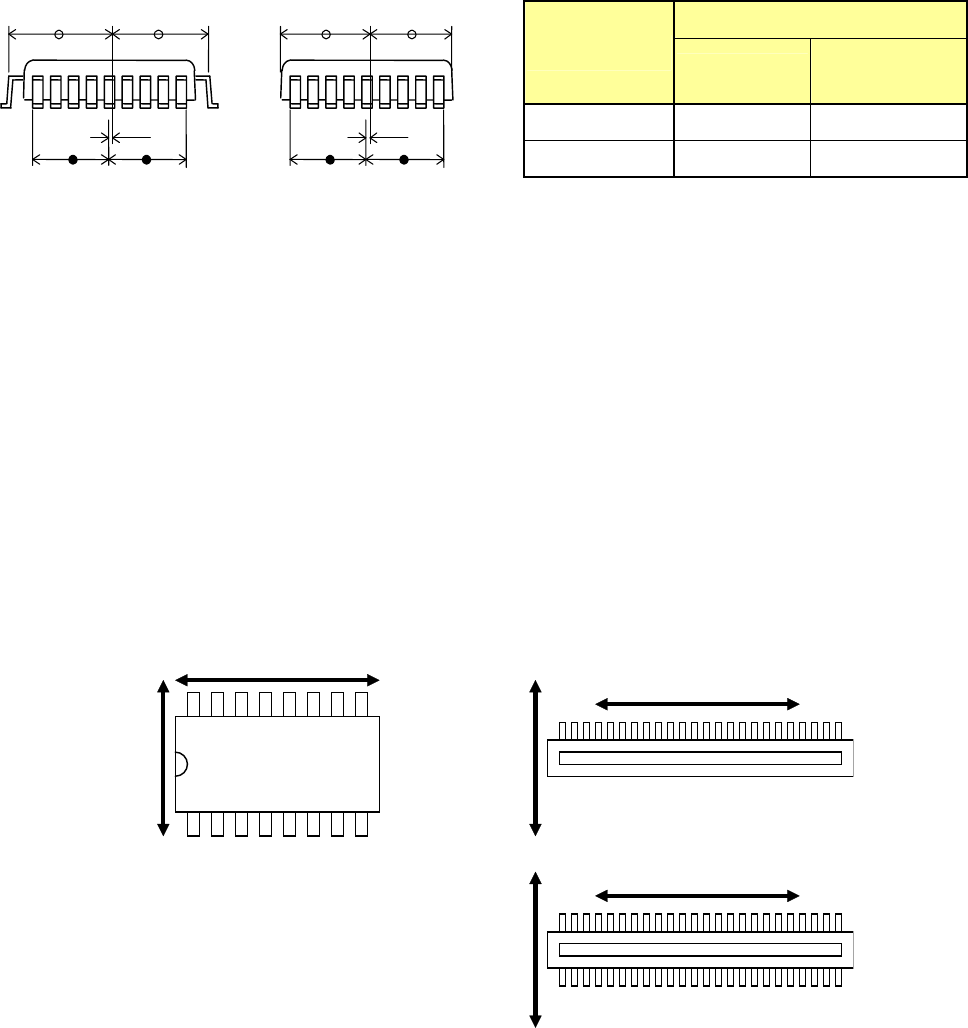
注 2: QFP、SOP、SOT 等引脚立起部分、或从该壳体中心位置(见图的 S
C
)与引脚的中心位置(见
图的 L
C
)之差 d的容许值见下表。达不到该容许值时,为上述贴片精度的对象外。
壳体的中心位置与引脚的中心位置
Sc
Lc
d
Sc
Lc
d
注 3:检测 4 边、4 角、重心,使用 JUKI 的下列精度评价夹具时:
注 4:保证上述精度时的周围温度为 20℃~25℃之间。
注 5:在下列条件下无法进行 BGA 图像识别校正,故除外。
① 焊接球与焊接球焊接处的基板部位没有明显的亮度差时。(陶瓷壳体的 BGA 为对象之外)
② 焊接球径与同一粗细图案(Pattern)接线,球不能独立识别出来时。
③ 焊接焊球的基板部位上,有与焊接球同一径的穿孔时。
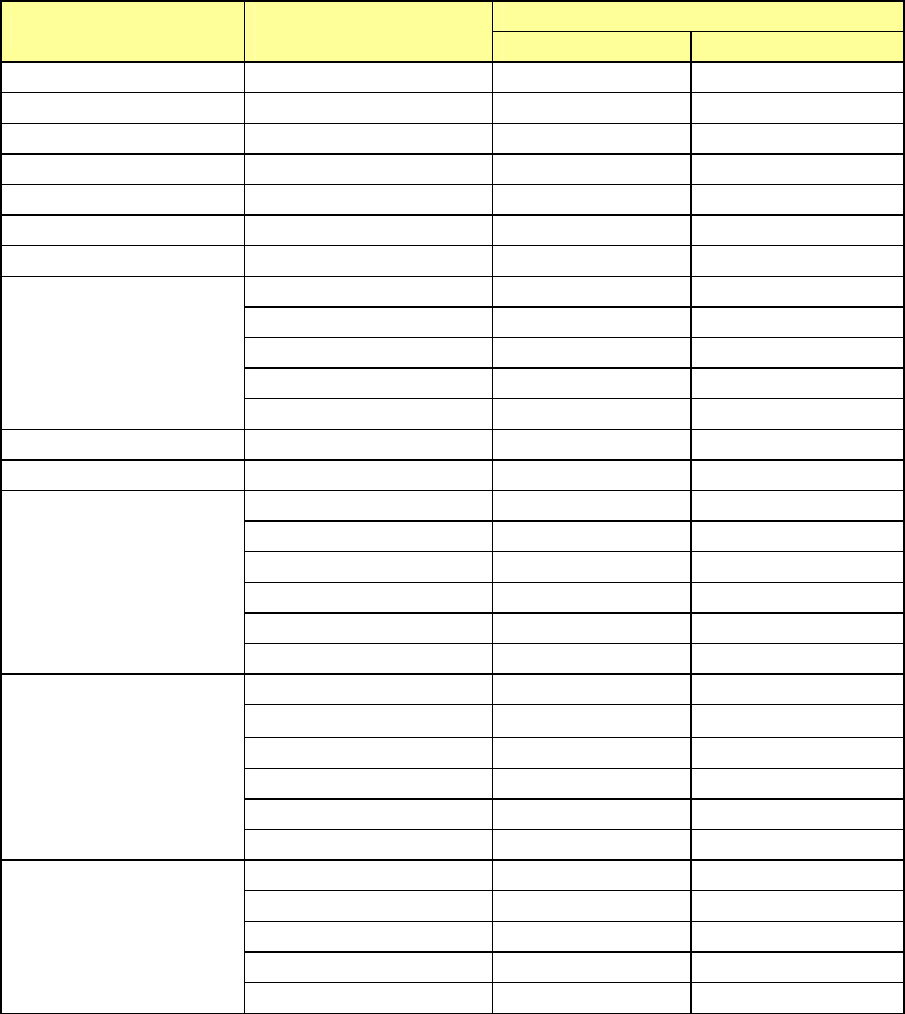
注 6: SOP 精度、单向引脚连接器、双向引脚连接器精度、分割识别对象元件的引脚直角方向、引脚平
行方向,指的是如下方向。
リード直角方向
リード直角方向
リード平行方向
リード平行方向
リード直角方向
リード平行方向
引脚间距
d 的容许值
□25.4 以下
大于□25.4
□33.5 以下
0.8 以上 73μm 52μm
0.65 15μm 15μm
d 的容许值
引脚直角方向
引脚直角方向
引脚直角方向
引脚平行方向
引脚平行方向
引脚平行方向
第 1 部 基本篇 第 1 章 装置概要
1-27
注 7:为在激光测定的横断面精度。
注 8:在同一贴片点反复时的精度。
贴片精度的定义:在夹具基板上最低贴片 6 个。测定标准,为在夹具基板上的元件定位标记,从各
个测定基准起的绝对值在精度范围内。
注 9:通用图像的贴片精度,受元件特性及照明条件影响,精度差别较大。
例> 把 1005 电阻芯片作为通用图像元件识别时,贴片精度为±50
μ
m(3
σ
),需要注意下列几点。
·关闭同轴照明灯,把红色侧面照明及反射照明(=下方照明)的亮度设定高一些,调整照明,使
吸嘴不要映入 VCS。
·有的因元件的反光特性,需要专用的吸嘴。
第 1 部 基本篇 第 1 章 装置概要
1-28
(2)贴片精度(
θ
)
贴片精度
θ
(激光识别) 单位: °
元件尺寸
※为端子间的尺寸
激光
LNC60 FMLA
0402 方形芯片 - ±5 (注3)(注 4)
-
0603 方形芯片 - ±3
-
1005 方形芯片 - ±2.5 ±2.5
1608 以上的方形芯片 - ±2 ±2
圆筒形芯片 - ±3 ±3
SOT
- ±3 ±3
铝电解电容器 - ±10 ±10
SOP 、TSOP
50mm 以下
- -
40mm 以下 ±0.30(33.5 以下) ±0.30(33.5 以下)
30mm 以下 ±0.30 ±0.30
20mm 以下 ±0.33 ±0.33
10mm 以下 ±0.67 ±0.67
PLCC
- ±0.52 ±0.52
SOJ
- ±0.52 ±0.52
QFP(间距 0.8 以上)
50mm
- -
40mm 以上不满 50mm - -
30mm 以上不满 40mm ±0.33(33.5 以下) ±0.33(33.5 以下)
20mm 以上不满 30mm ±0.37 ±0.37
10mm 以上不满 20mm ±0.44 ±0.44
不满 10mm ±0.44 ±0.44
QFP(间距 0.65)
50mm
- -
40mm 以上不满 50mm - -
30mm 以上不满 40mm ±0.30(33.5 以下) ±0.30(33.5 以下)
20mm 以上不满 30mm ±0.30 ±0.30
10mm 以上不满 20mm ±0.30 ±0.30
不满 10mm ±0.33 ±0.33
BGA
(球的最外周对边距离)
50mm
- -
40mm 以上不满 50mm - -
30mm 以上不满 40mm ±1.23(33.5 以下) ±1.23(33.5 以下)
20mm 以上不满 30mm ±1.23 ±1.23
不满 20mm ±1.28 ±1.28