KE-3010A_20VA_20VRA使用说明书.pdf - 第652页
第 1 部 基本篇 第 4 章 制作生产程序 4-256 2) 说明、动作模式 当识别台架标记失败,画面的 [ 说明 ] 栏显示提示信息时,可以选择 [ 处理模式 ] 的项目。 发生错误时,识别结果不会被记忆。 请选择在以后什么时间识别标记。 a ) 供料器台架下降为止不校正标记(使用默认的位置) 将默认值适用于发生识别错误的台架的坐标,视为完成识别。 b ) 进行下一次台架标记识别 将发生识别错误的台架作为未识别处理。因此,不能校正台…
第 1 部 基本篇 第 4 章 制作生产程序
4-255
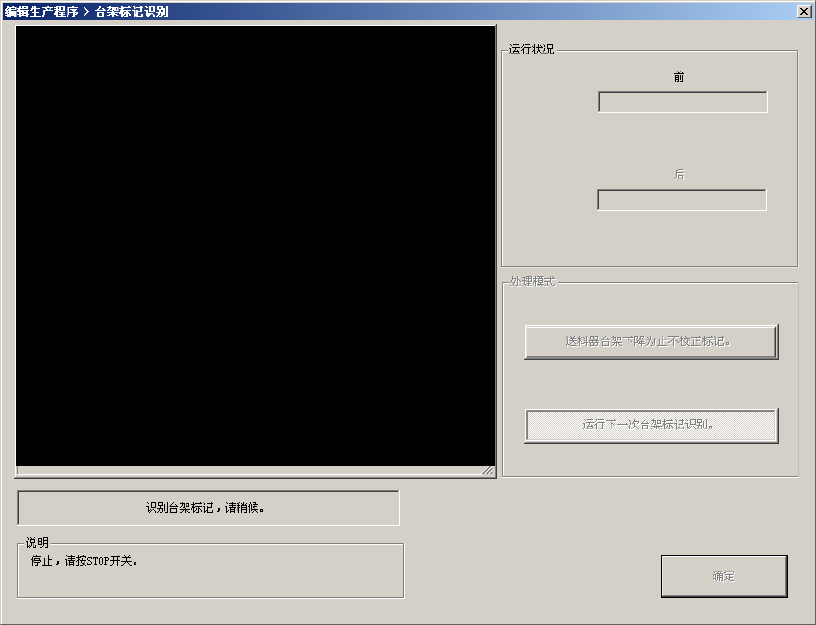
在执行过程中,显示如下的画面。
在左上部显示 OCC 拍摄的画面。
供料器台架标记识别过程中,因某种原因需要停止时,请按下<STOP>开关。
运行停止后,即使在前后连续识别中,也会即刻终止处理,返回到开始画面。
1) 运行状况
●前、后
显示指定的站点中当前运行点的动作状况。
第 1 部 基本篇 第 4 章 制作生产程序
4-256
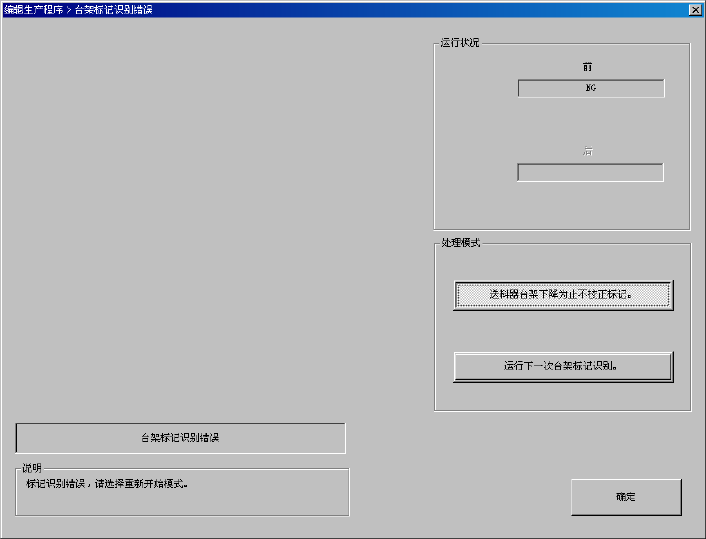
2) 说明、动作模式
当识别台架标记失败,画面的[说明]栏显示提示信息时,可以选择[处理模式]的项目。
发生错误时,识别结果不会被记忆。
请选择在以后什么时间识别标记。
a) 供料器台架下降为止不校正标记(使用默认的位置)
将默认值适用于发生识别错误的台架的坐标,视为完成识别。
b) 进行下一次台架标记识别
将发生识别错误的台架作为未识别处理。因此,不能校正台架标记。
下一次需要校正台架标记时,必须再次进行识别操作。
◇选择后,请按下[确定]按钮,结束识别操作。
在进行前后连续识别时,若有未识别的台架,识别操作会继续进行。
第 1 部 基本篇 第 4 章 制作生产程序
4-257
4-5-4-7 跟踪
4-5-4-7-1 贴片位置
通过摄像机跟踪贴片位置。确认监视器中显示的贴片位置,当输入坐标不准确时,可通过示教进
行修正。
(1) 设置条件
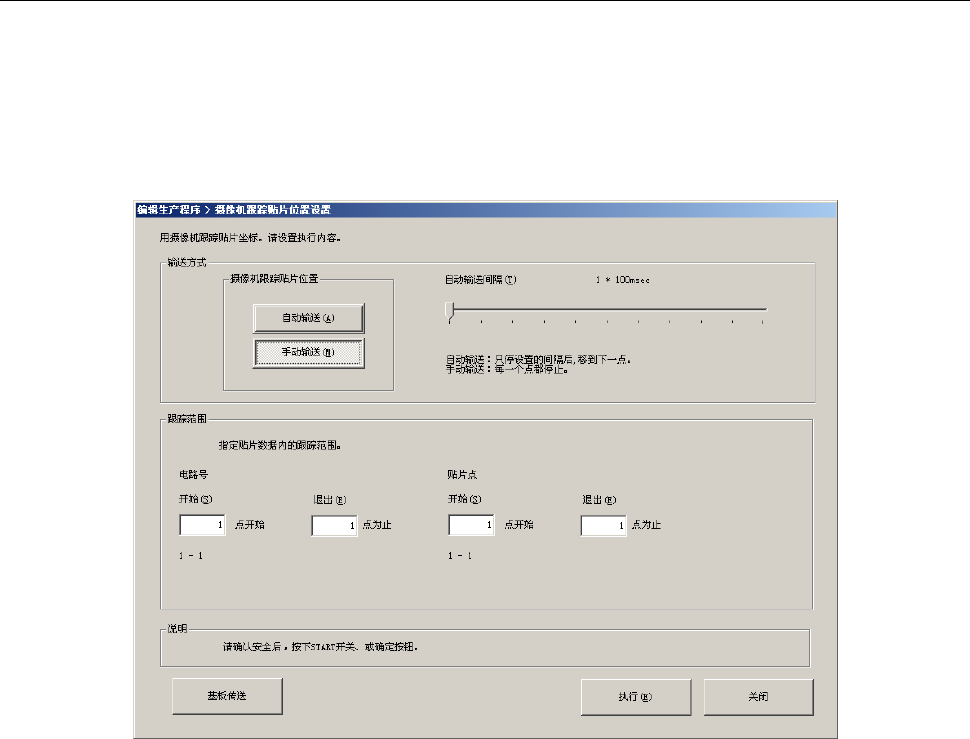
从菜单栏中选择「机器操作」/「跟踪」/「贴片位置」后,显示如下画面。
1) 输送方式
a)自动输送
以一定的间隔,依次用摄像机捕获贴片位置。按以下的「自动输送间隔」设定的时间停止,
经过该设定的时间后移动到下一点。
●自动输送间隔:调整停止间隔。可设定的范围为0.1秒(100ms)~20秒。
b)手动输送
在毎一点贴片位置停止。保持停止状态,直至用户操作。
在贴片位置摄像机跟踪画面中,按下[Previous]按钮时返回到前一个贴片点,按下
[Next]按钮或<START>开关时,则会移动到下一个贴片点。
2)跟踪范围
选择执行跟踪的电路号及贴片点。
输入跟踪范围是从贴片数据的第几点到第几点。默认为跟踪所有贴片点。
所有跟踪条件设置完毕,准备完成后,按下<START>开关或[执行]按钮。
按下[取消]按钮时,会返回原来的画面。