KE-3010A_20VA_20VRA使用说明书.pdf - 第482页
第 1 部 基本篇 第 4 章 制作生产程序 4-86 (8) 释放检查 设置本功能, 可在以激光定心的元件为对象进行贴片动作后, 通过激光检查元件是否仍吸附在吸 嘴上。 确认元件释放要花时间 ( 因为需在停止状态下执行 ) 。 所以通常请将初始值设置为 “ 否 ” 。 (9) 跳过元件 如果将跳过元件设置为「是」,则生产时将跳过指定的元件,不进行贴片。 使用被指定为跳过的元件的贴片记录,在生产时虽然不进行贴片,但不加到未贴片列表中。 …
第 1 部 基本篇 第 4 章 制作生产程序
4-85
(3) 元件层
设置同一贴片层内各元件的优先顺序。
该设置仅在进行优化顺序的生产时有效。
此外,与贴片层不同元件用完时不会进入暂停状态。
请在下拉式列表中显示的层1(优先度高)到层7(优先度低)选择设置。
(4) 速度
在用小的吸嘴吸取元件时,或者元件表面有沟槽导致真空漏气等情况时,可以从默认值变更XYZ轴的
加速度。
XY
从下拉列表上选择设置元件吸取后向贴片位置移动的 XY
。
加速度
Z下降速度
从下拉列表上选择设置贴片位置的 Z 轴下降加速度(用于调整元件应力)。
选择负荷控制时,会变更为「FC 速度」。
Z上升速度
从下拉列表上选择设置贴片位置的 Z 轴上升加速度(用于稳定元件位置)。
1) 激光定心时
θ速度 (计测时)
从下拉列表上选择设置 θ 旋转速度。
在 Head 持有元件的状态下,LA 测量旋转时,对所有的运行
。
均有效
设置激光识别时的 θ 轴加速度。
θ速度 (计测外)
从下拉列表上选择设置 θ 旋转速度。
在 Head 持有元件的状态下,除 LA
。
测量旋转时以外,对所有旋转运行有效
设置除激光识别时以外的 θ 轴加速度。
2)图像定心时
·θ 速度
从下拉列表上选择设置 θ 旋转速度。
在 Head
。
持有元件的状态下运行有效
(5) 2 段控制
设置是否进行贴片时吸嘴的上升、下降速度 2 阶段控制。
调整设置为「是」时,要分别输入对上升、下降 2 阶段进行控制的高度。
(6) 真空时间调整
对是否调整真空时间进行设置。
调整设置为「是」时,要以 ms 为单位输入“真空停止时间”、“真空停止校正值”、“吹气开始时间”、
“吹气持续时间”、“真空结束等待时间”的调整时间。
使用夹式吸嘴时,在贴片动作时不进行调整。
(7) 试打
与「贴片数据」中的设置相同,仅对选择“是”的元件在生产画面(试打模式)中执行贴片。
在元件数据中设置时,为对该元件所有贴片点进行统一设置。
要对每一贴片点逐一设置时,请在贴片数据中设置。
先贴片
后贴片
第 1 部 基本篇 第 4 章 制作生产程序
4-86
(8) 释放检查
设置本功能,可在以激光定心的元件为对象进行贴片动作后,通过激光检查元件是否仍吸附在吸
嘴上。
确认元件释放要花时间(因为需在停止状态下执行)。
所以通常请将初始值设置为“否”。
(9) 跳过元件
如果将跳过元件设置为「是」,则生产时将跳过指定的元件,不进行贴片。
使用被指定为跳过的元件的贴片记录,在生产时虽然不进行贴片,但不加到未贴片列表中。
从数据库读入元件信息时,「跳过元件」数据将被更改为「否」。
第 1 部 基本篇 第 4 章 制作生产程序
4-87
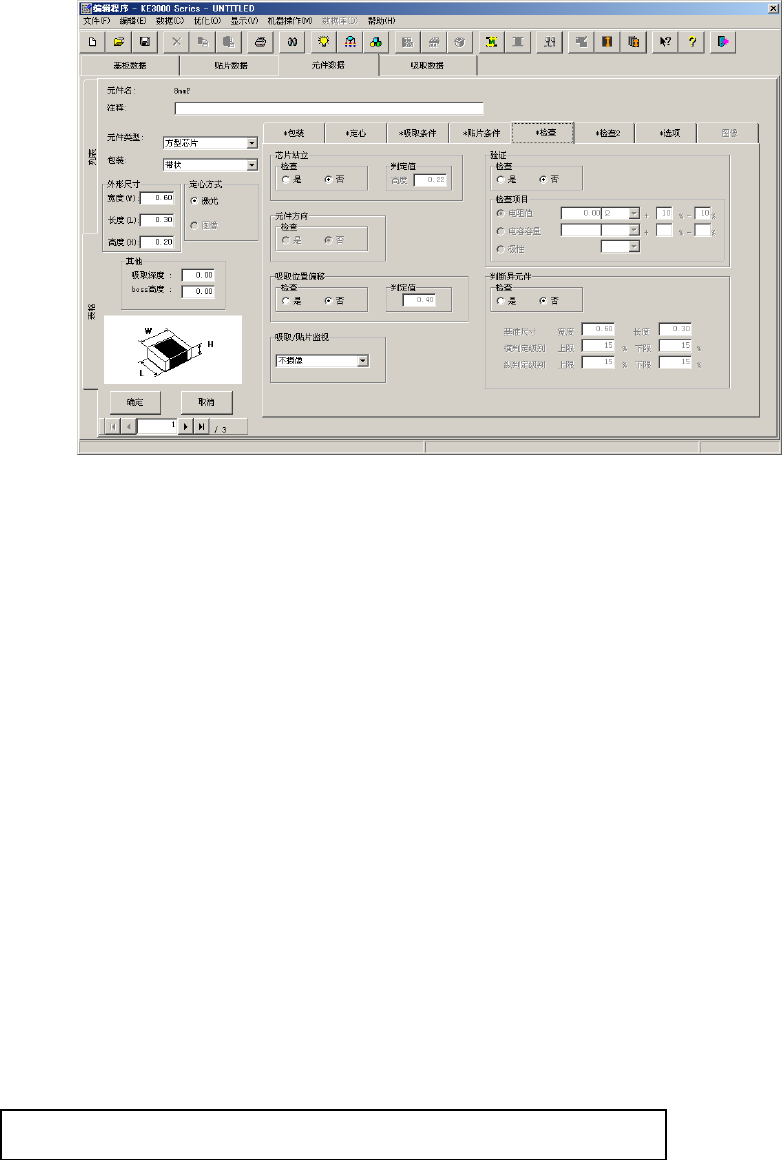
4-3-5-2-6 检查
对“芯片站立”、“元件方向”、“吸取位置偏移”、“验证”、“判断异元件”进行设置。
“SOT方向”、“验证”为选项。
(1) 芯片站立
指定是否对芯片站立进行检查。
通常对3216以下的芯片元件推荐执行检查,因此选择元件类别为「方形芯片」时,自动设置为[是]。
※判定值: 根据已输入的元件高度尺寸计算并自动输入。
(2) SOT方向(选项) / 元件方向
指定是否进行 3 端子引脚 SOT 方向检查、或在通用图像元件中定义的 SOT 等元件方向检查。
可对生产前及元件用完后的最初元件的 SOT 方向进行检查。
主要用于检查元件是否挂错。
仅当元件类型为 SOT、或「引脚元件类型中元件要素组数为 3 以下、外引脚或内引脚的元件要
素为 2 以上」的通用图像元件时,才可以选择此项。
(3) 吸取位置偏移
使用此项功能,可以检查元件中心偏离吸嘴中心是否超过判定值。
但此项功能只限包装方式为带状供料器有效。除此之外,显示无效。
需要使用该项功能来检测元件的吸取位置偏移时,请选择[是],并输入判定值。
判定值的输入范围为:0~元件外形的纵向尺寸。(元件供应角度为90°、270°时,元件的外形尺
寸为横向。)
检查设置为[是]时,默认判定值为:
设定值,在编辑程序的环境设置中进行设置。默认值为 50(%)。
元件外形纵向尺寸(或外形横向尺寸)÷2×(设定值/100)