FX-1R_InstructionManual_C_Rev03a.pdf - 第54页
第 1 章 设备概要 1-32 1.7.5 X,Y,Z, θ ,Y 台轴的说明 本设备中,下列 5个轴(X、Y、Z、 θ 、Y 台)均为数控轴。 1)X、Y 轴 设备的左右方向为 X, 前后方向为 Y, 以0.01mm为单位, 表示为 X=○○○.○○mm, Y=○○○.○○mm。坐 标系分为生产程序用坐标与示教用坐标。两坐 标自动变更,无需刻 意分开使用。 2)Z 轴 显示高度, 以0.01mm为单位, 表示为 Z=○○.○○mm。 …
第 1 章 设备概要
1-31
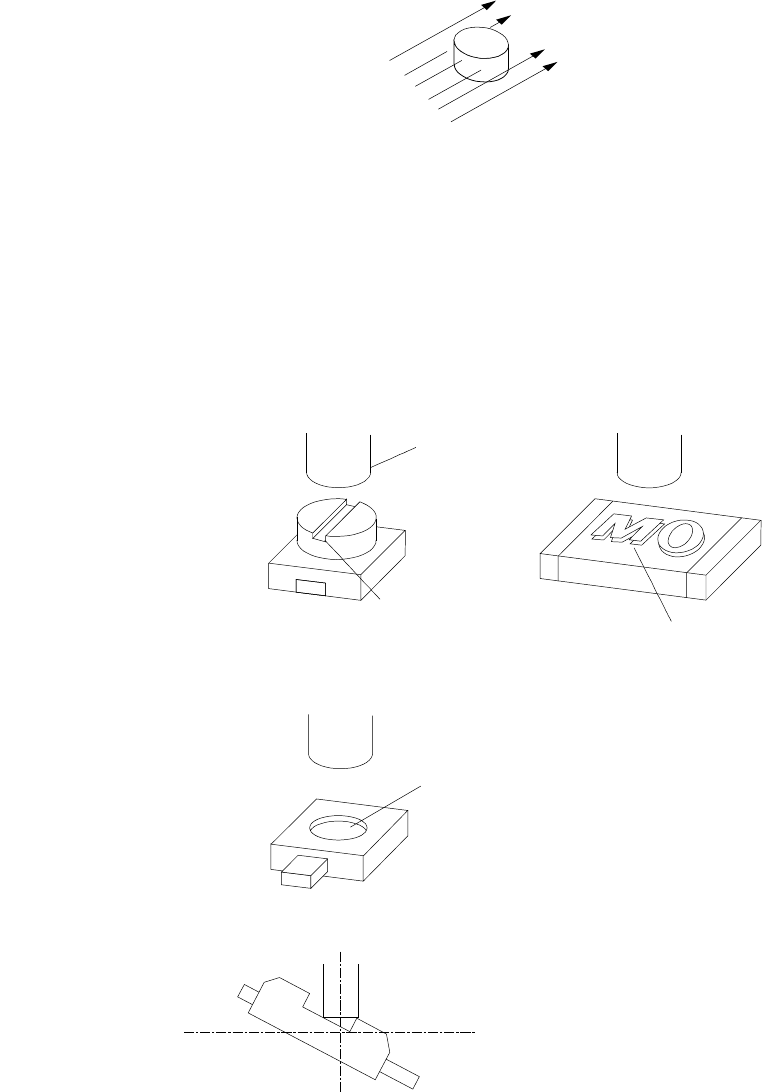
§ 注意: 关于贴片元件形状 §
(1) 圆筒形元件的元件阴影不存在最小宽度,无法用激光校准进行识别。
(2) 如果贴片元件上有凹凸或弯曲,将会导致吸取不良、精度不良或激光识别错误。(改变吸嘴
编号有可能可以对应。)
<
吸取不良的例子>
激光识别
<精度不良的例子>
吸嘴
一字槽
凹面
阳文
第 1 章 设备概要
1-32
1.7.5 X,Y,Z,
θ
,Y 台轴的说明
本设备中,下列 5个轴(X、Y、Z、
θ
、Y 台)均为数控轴。
1)X、Y 轴
设备的左右方向为 X,前后方向为 Y,以0.01mm为单位,表示为 X=○○○.○○mm,
Y=○○○.○○mm。坐标系分为生产程序用坐标与示教用坐标。两坐标自动变更,无需刻
意分开使用。
2)Z 轴
显示高度, 以0.01mm为单位,表示为 Z=○○.○○mm。钳夹基板时基板上面(不使用夹具)
为 0,上升方向为+。
3)
θ
轴
显示贴片头的旋转角度,以0.05°为单位,表示为 A=○○.○○。
以逆时针旋转为正值。
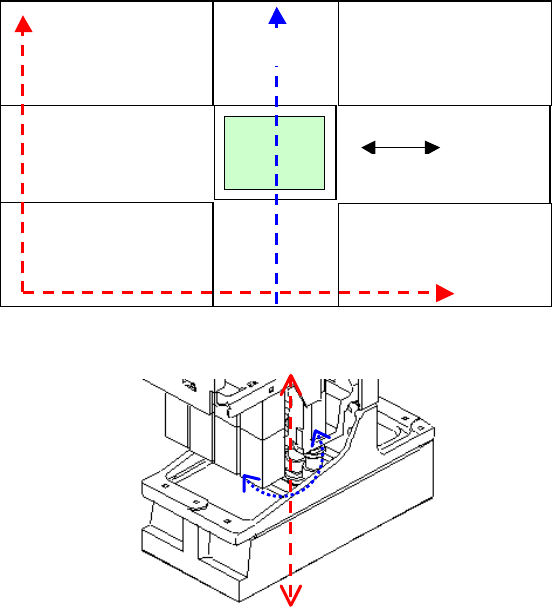
4)Y 台轴
Y 台轴,是中心传送带(Y 台)钳夹和固定基板后,确定其在 Y 向位置的轴。
各轴的关系如下图所示:图1.7-8 为 X、Y、Y 台关系,图 1.7-9 为 Z、
θ
轴关系。
Y テーブル軸
基板
X 軸
Y 軸
搬送方向
图 1.7-8 各轴关系图 (X、Y、Y 台)
图 1.7-9 各轴关系图 (Z、
θ
)
Z
轴
θ
轴
Y 台轴
传送方向
第 1 章 设备概要
1-33
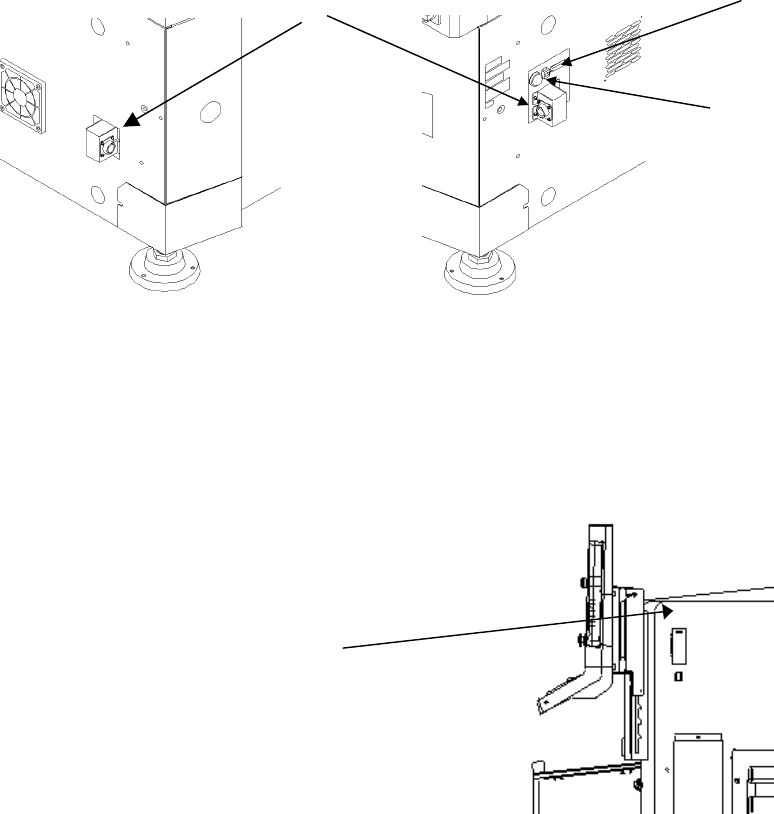
1.8 与外部设备的接口
1.8.1 配置
① 是主机与其他设备联机使用时,与其他设备连接信息用的接口(14 针),用于传输 Ready
Out(Ready In)信号。传送方向“左→右”、“右→左”方向相反时,[Ready Out](或
[Ready In])的接口针配置位置相反。
② 为标准 Centronics 打印机接口(Dsub 25 针)。
③ 为以太网接口(模块接口 8 针)。
主机左侧 主机右侧
④ 为手控操作盘(HOD)用接口(36 针)。
主机右侧面
①
③
②
④