NXT-II 机械手册.pdf - 第566页
QD145-21 8. 部件的更换 NXT II 机械手册 539 6. 在机器操作电路板上显示出选择画 面。请用箭头键选择 [Conveyor] 后,按下 [OK] 按 键。 7. 如果更新完成了请选择 [Reboot],重新启动机器。 进行搬运轨道校正 1. 请确认机器的紧急停止开关没有按 下。 2. 请确认机器处于等待开始的状态 。 3. 请启动辅助软件。 4. 请选择对象模组,单击 [ 远程操作 ]。 5. 请单击 [ 搬运轨道…
8. 部件的更换 QD145-21
538 NXT II 机械手册
8.14.4 更换控制器后的调整
更换控制器后需要以下作业。
a. 搬运轨道软件的版本升级
b. 搬运轨道校正值
c. 调整搬运轨道传感器灵敏度
进行搬运轨道软件的版本升级
1. 请执行机器手动模式指令的自我诊断指令。详细内容请参照,「NXT II 系统手册」的
「手动模式指令」。
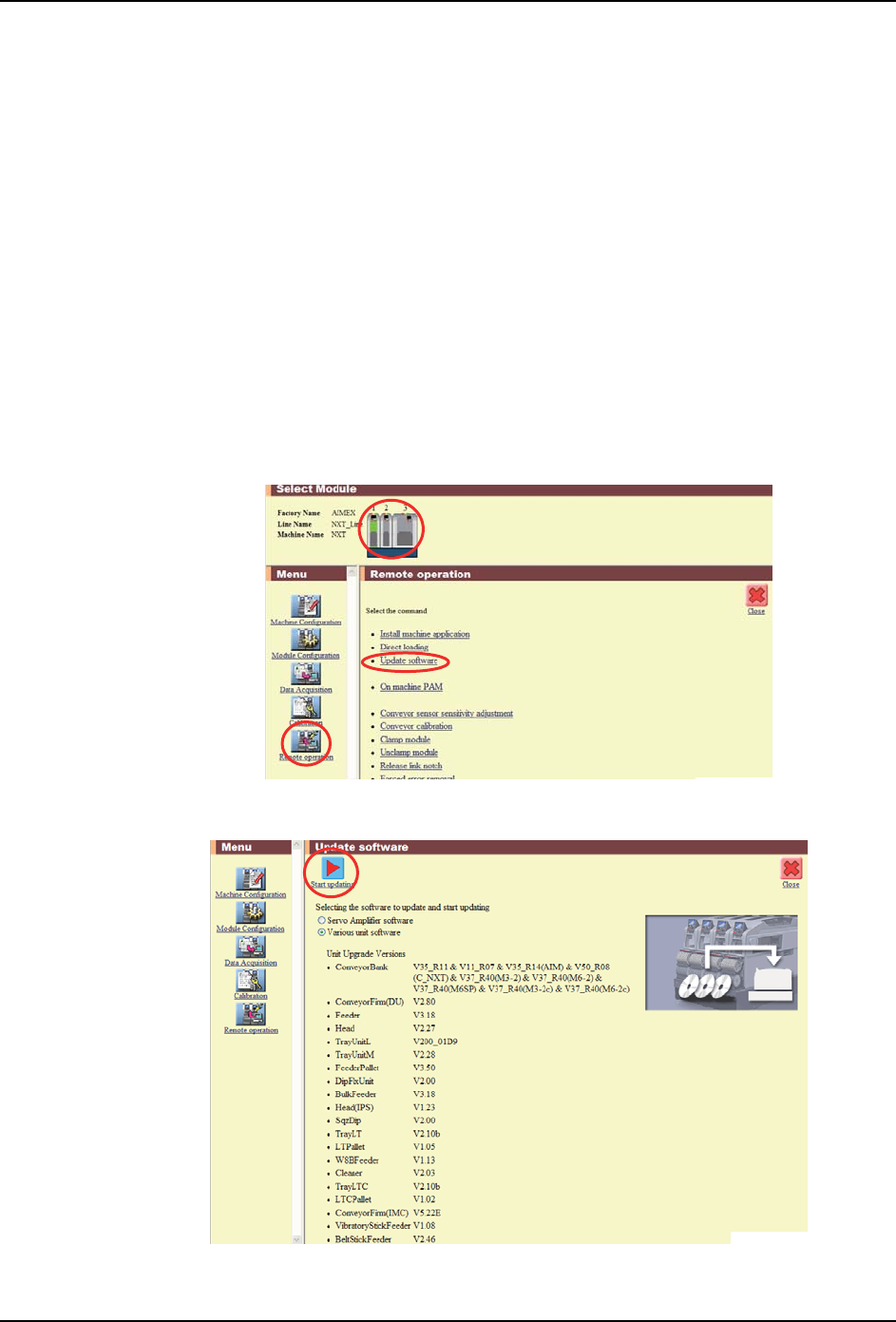
2. 请启动辅助软件。
3. 请选择对象模组,单击 [ 远程操作 ]。
4. 请单击 [ 软件更新 ]。
5. 请单击 [ 更新开始 ]。机器自动重新启动。
01MEC-1230E
QD145-21 8. 部件的更换
NXT II 机械手册 539
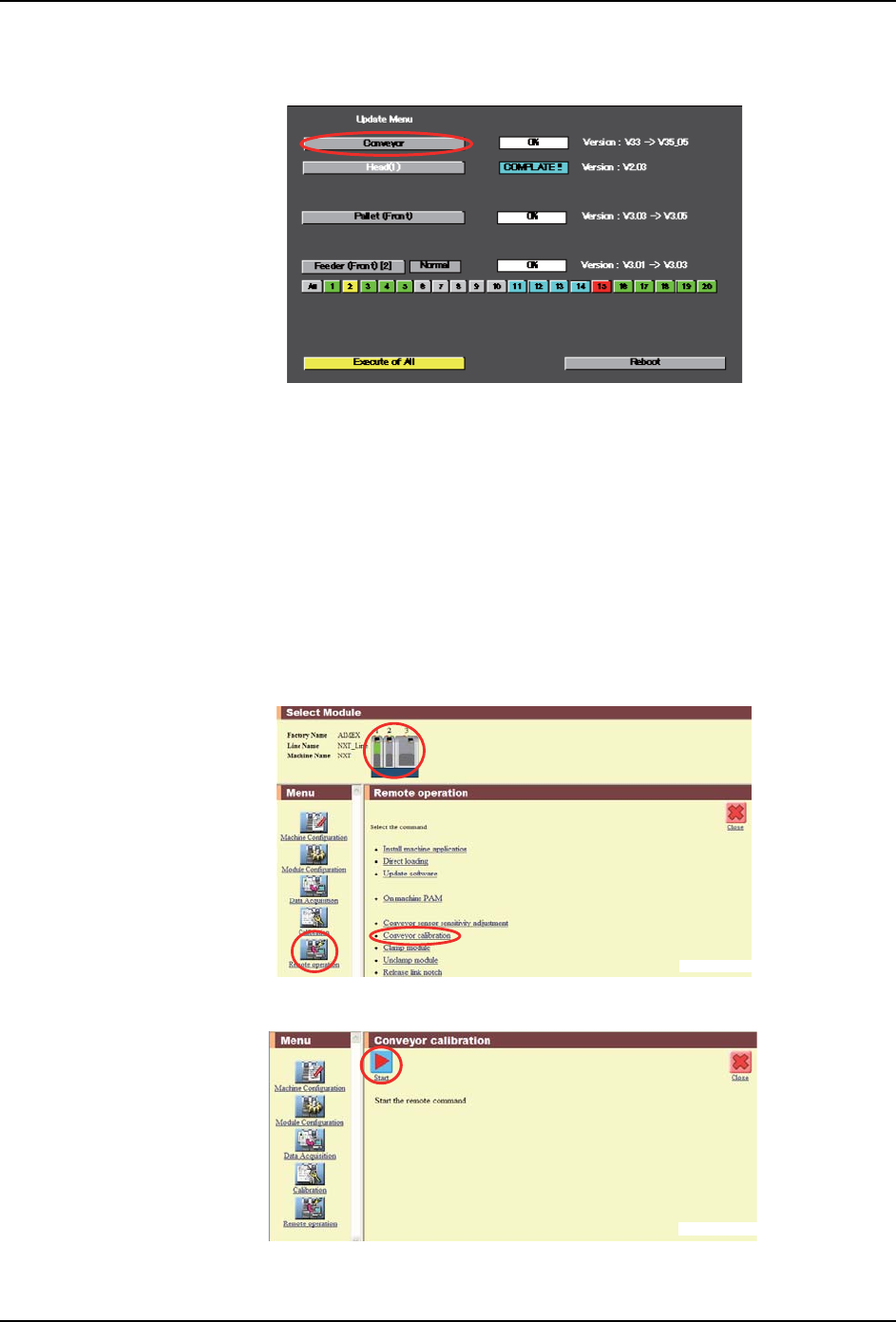
6. 在机器操作电路板上显示出选择画面。请用箭头键选择 [Conveyor] 后,按下 [OK] 按
键。
7. 如果更新完成了请选择 [Reboot],重新启动机器。
进行搬运轨道校正
1. 请确认机器的紧急停止开关没有按下。
2. 请确认机器处于等待开始的状态。
3. 请启动辅助软件。
4. 请选择对象模组,单击 [ 远程操作 ]。
5. 请单击 [ 搬运轨道校正 ]。
6. 请单击 [ 开始 ]。开始校正。
7. 校正结束后,请把主开关 OFF,再次设定为 ON。
01MEC-1231E
01MEC-1232E
8. 部件的更换 QD145-21
540 NXT II 机械手册
调整搬运轨道传感器灵敏度
1. 请确认搬运轨道传感器间没有电路板等的遮光物。
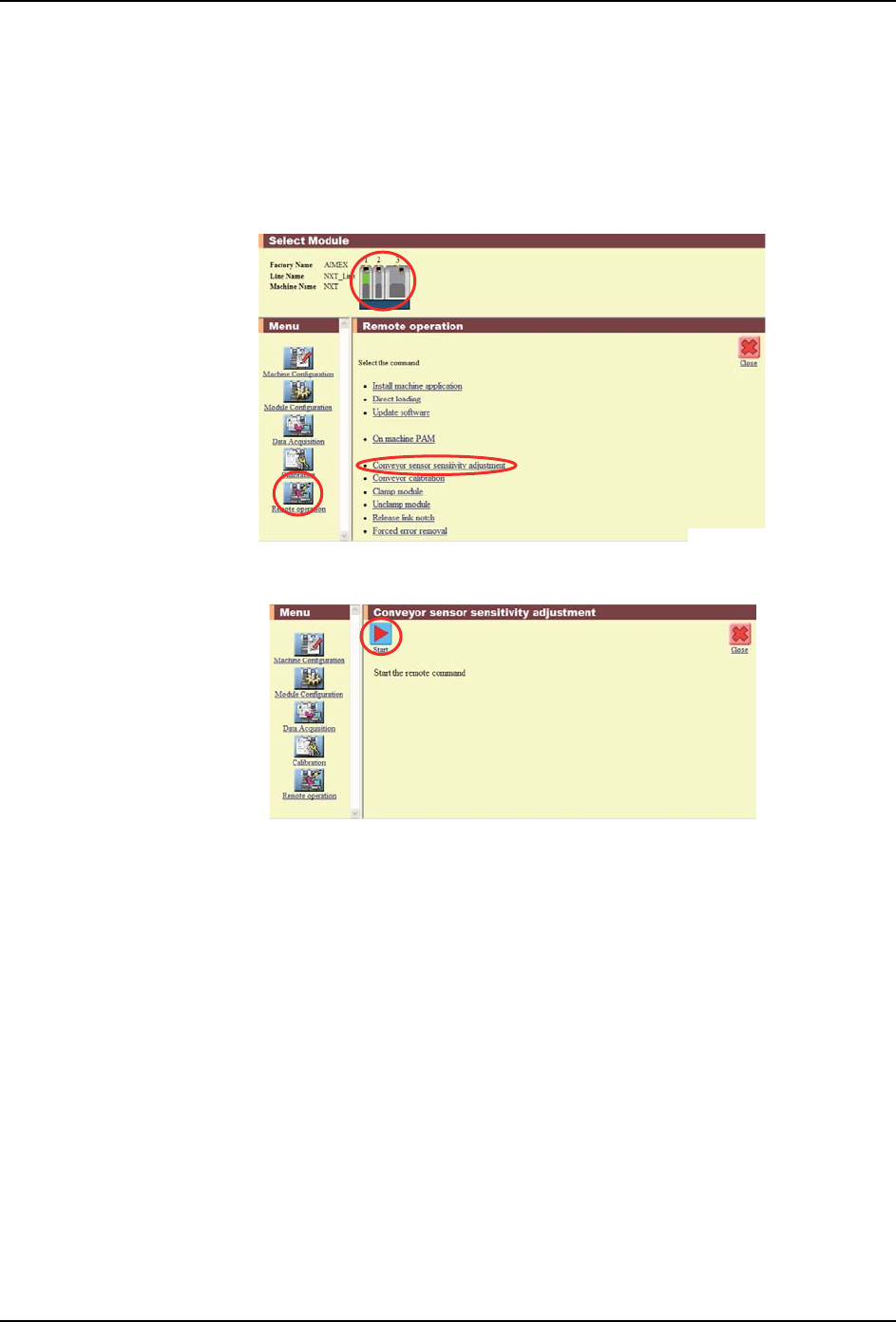
2. 请启动辅助软件。
3. 请选择对象模组,单击 [ 远程操作 ]。
4. 请单击 [ 调整搬运轨道传感器灵敏度 ]。
5. 请单击 [ 开始 ]。
01MEC-1233E
01MEC-1234E