4OM-1625-004_w.pdf - 第278页
4OM-1603 3-123 3. Error IDs and Remedial Procedures : Chap.3 1012-005 Error ID Error Name, Description, Cause, and Remedy 600402 Head Rotate center offset teach Error of Recognition Command response. ----- 600403 Head Ro…
4OM-1603
3-122
3. Error IDs and Remedial Procedures : Chap.3
1012-005
Error ID Error Name, Description, Cause, and Remedy
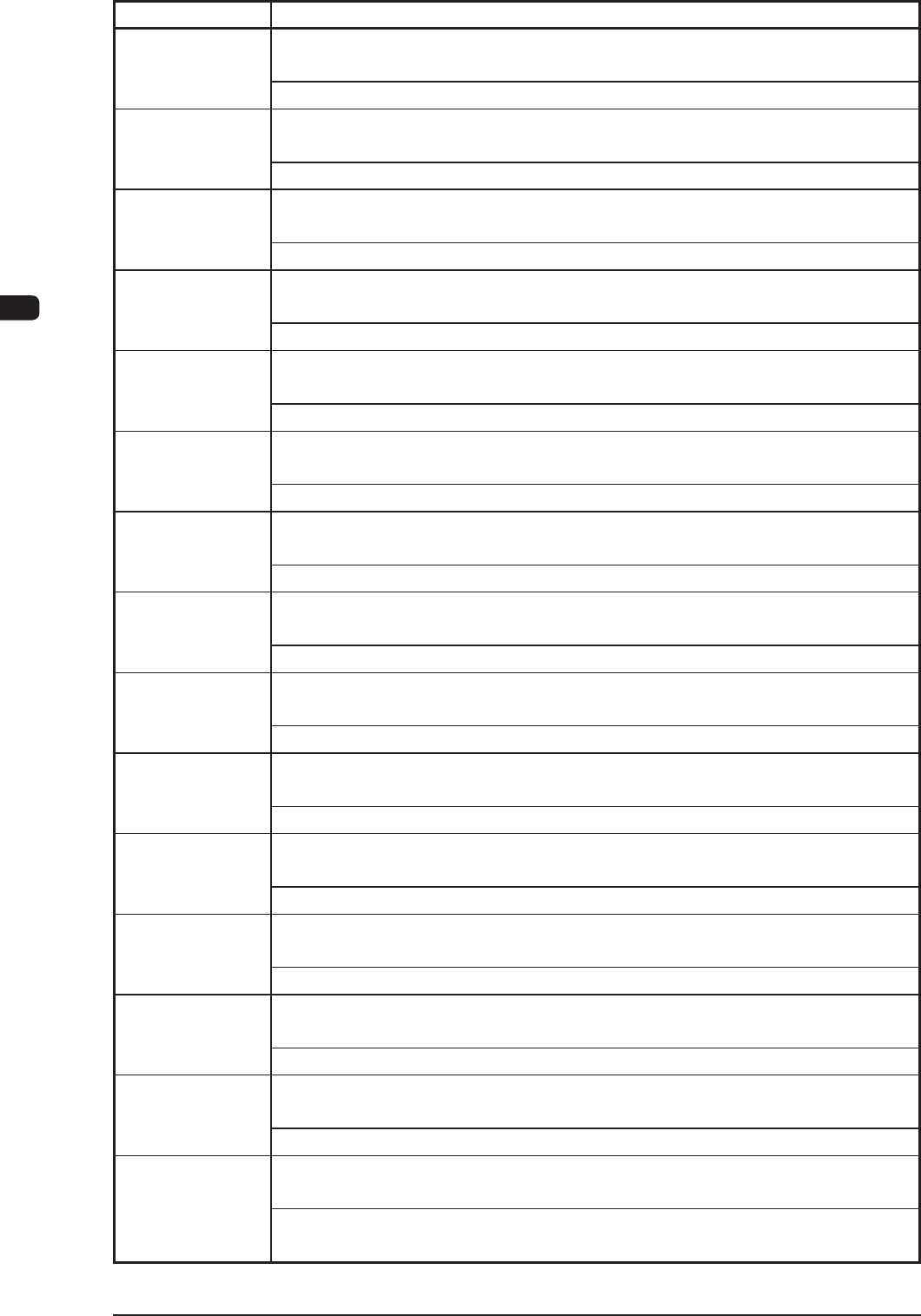
600307 Head Rotate Theta Axis offset
Error when HL-axis and NL-axis began zeroing
-----
600308 Head Rotate Theta Axis offset
Error while HL-axis and NL-axis on zeroing movement
-----
600309 Head Rotate Theta Axis offset
Error of Data set for XY Beam.
-----
60030a Head Rotate Theta Axis offset
Error of moving for XY Beam.
-----
60030b Head Rotate Theta Axis offset
Time-out in XY Beam movement
-----
60030c Head Rotate Theta Axis offset
Time-out of communication with recognition.
-----
60030d Head Rotate Theta Axis offset
Error when L-axis began zeroing
-----
60030e Head Rotate Theta Axis offset
Error of L-axis on zeroing
-----
60030f Head Rotate Theta Axis offset
Error when L-axis began to drop
-----
600310 Head Rotate Theta Axis offset
Error in L-axis dropped
-----
600311 Head Rotate Theta Axis offset
Time-out of the movement of L-axis, Z-axis
-----
600312 Head Rotate Theta Axis offset
Error when Z-axis began to move
-----
600313 Head Rotate Theta Axis offset
Error while Z-axis is moving
-----
600314 Head Rotate Theta Axis offset
-----
-----
600401 Head Rotate center offset teach
Can not recognize Glass Jig
Please check that Glass Jig is right on Glass Jig place(Check it because there is
a possibility that no nozzle is on head, or vacuum is not "ON")
4OM-1603
3-123
3. Error IDs and Remedial Procedures : Chap.3
1012-005
Error ID Error Name, Description, Cause, and Remedy
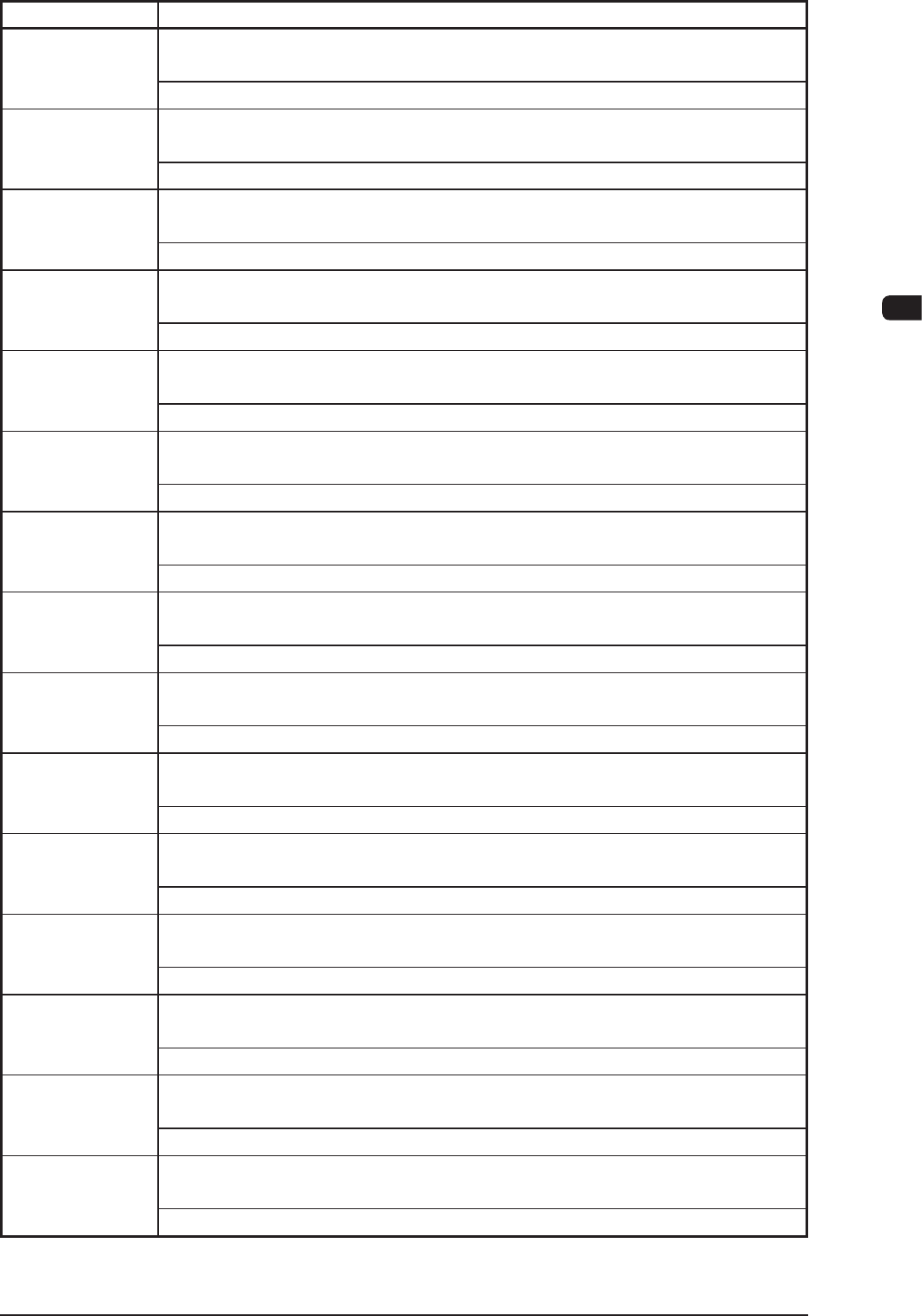
600402 Head Rotate center offset teach
Error of Recognition Command response.
-----
600403 Head Rotate center offset teach
Error of coordinates calculation.
-----
600404 Head Rotate center offset teach
Error when Jig pickup began
-----
600405 Head Rotate center offset teach
Error in the movement of Jig pickup
-----
600406 Head Rotate center offset teach
Error when Jig store began
-----
600407 Head Rotate center offset teach
Error in the movement of Jig store
-----
600408 Head Rotate center offset teach
Error when HL-axis and NL-axis began zeroing.
-----
600409 Head Rotate center offset teach
Error while HL-axis and NL-axis are on zeroing
-----
60040a Head Rotate center offset teach
Error when DD-axis began to rotate
-----
60040b Head Rotate center offset teach
Error while DD-axis is rotating
-----
60040c Head Rotate center offset teach
Error of Data set for XY Beam.
-----
60040d Head Rotate center offset teach
Error of moving for XY Beam.
-----
60040e Head Rotate center offset teach
Time-out in XY Beam
-----
60040f Head Rotate center offset teach
Time-out of communication with recognition
-----
600410 Head Rotate center offset teach
Error when L-axis began zeroing
-----
4OM-1603
3-124
3. Error IDs and Remedial Procedures : Chap.3
1012-005
Error ID Error Name, Description, Cause, and Remedy
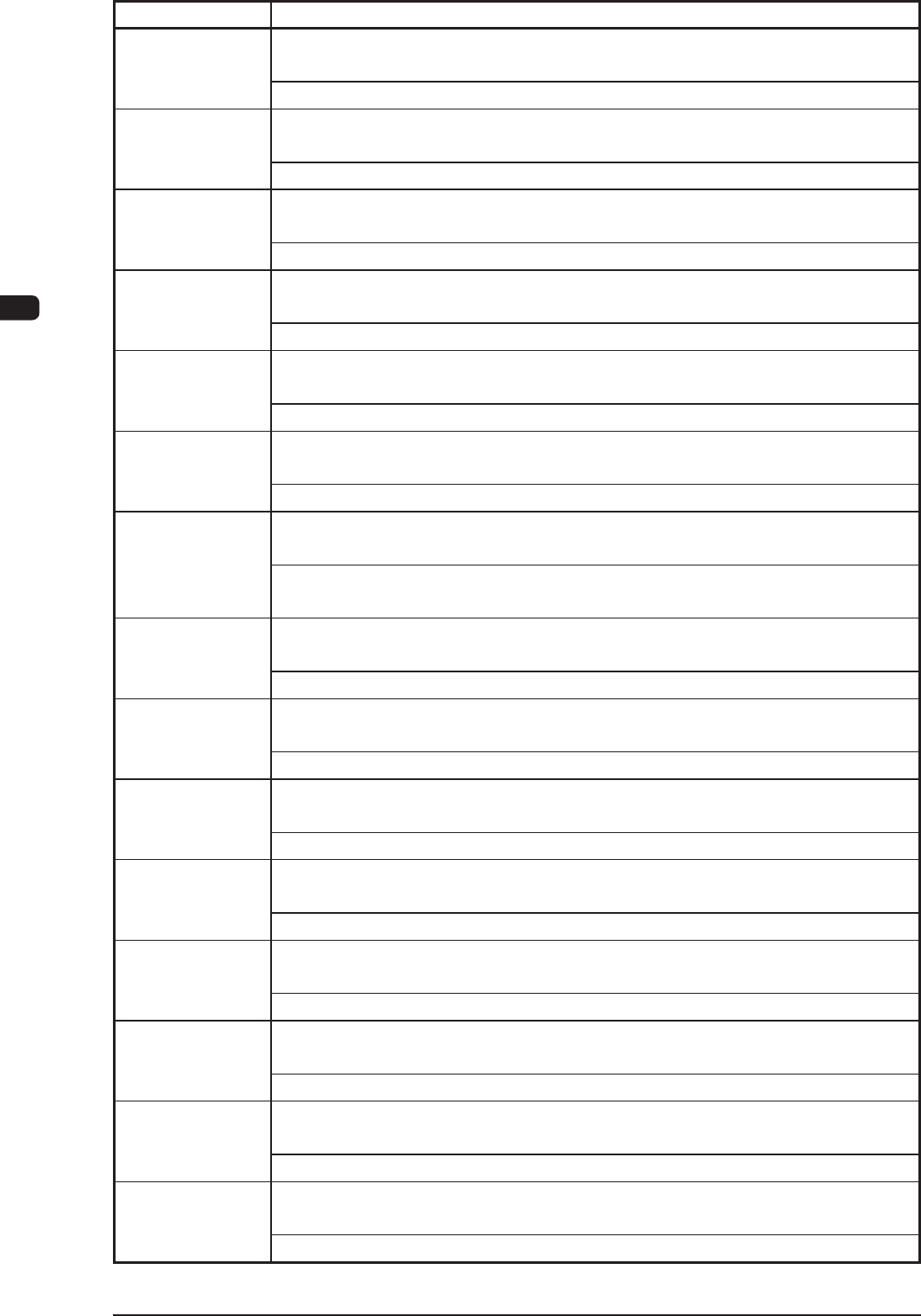
600411 Head Rotate center offset teach
Error while L-axis is on zeroing
-----
600412 Head Rotate center offset teach
Error when Z-axis began to rotate
-----
600413 Head Rotate center offset teach
Error while Z-axis is rotating
-----
600414 Head Rotate center offset teach
Error when L-axis began to drop
-----
600415 Head Rotate center offset teach
Error when L-axis is dropping
-----
600416 Head Rotate center offset teach
-----
-----
600501 Reference mark position teach
Could not recognize Glass Jig in CTR Fly Recognition.
Please check that Glass Jig is right on Glass Jig place(Check it because there is
a possibility that no nozzle is on head, or vacuum is not "ON")
600502 Reference mark position teach
Error of Recognition Command response in case of CTR Fly Recognition
-----
600503 Reference mark position teach
Could not recognize Standard Mark
-----
600504 Reference mark position teach
Error of Recognition Command response in case of Standard Mark Recognition
-----
600505 Reference mark position teach
Error of coordinates calculation of CTR Fly Recognition
-----
600506 Reference mark position teach
Error when Jig pickup of CTR Fly Recognition began
-----
600507 Reference mark position teach
Error of the movement of Jig pickup of CTP Fly Recognition
-----
600508 Reference mark position teach
Error when Jig store of CTR Fly Recognition began
-----
600509 Reference mark position teach
Error of the movement of Jig store of CTR Fly Recognition
-----