NXT2系统手册.pdf - 第452页
8. NXT-2 软件工具 QD142-14 432 NXT II 系统手册 8.9.10 指令列表 (搬运轨道) 指令名 (状态确认) 说明 搬运轨道传感器 状态 能够确认以下的搬运轨道传感 器状态。 1. 搬运轨道电路板通过确认传感器 L 2. 搬运轨道电路板通过确认传感器 R 3. 电路板松开确认传感器 4. 搬运轨道支撑销检测传感器 · 机器启动后 1 次也没有开始过自动运转时,不进行动作 。请通过 手动指令的操作除去电路板。 …
QD142-14 8. NXT-2 软件工具
NXT II 系统手册 431
定位单动动作
需要确认往复臂动作时
需要确认料盘箱动作时
需要同时确认往复臂动作与料盘箱动作时
需要将前进位置的往复臂收存到料盘箱中时
动作模式 说明
在现在的料槽位置
上往复臂前进
[功能]
在现在的料槽位置上,往复臂向修正 TY 位置前进
·修正 TY 在操作员侧为负值。
·由于与 TZ 轴的位置关系,往复臂不能动作时出现错误。
料盘排出时TY轴
向退避位置移动
[功能]
在现在的料槽位置上,往复臂向料盘排出时 TY 轴退避位置移动
·由于与 TZ 轴的位置关系,往复臂不能动作时出现错误。
往复臂连续前后动
作
[功能]
在现在的料槽位置上,往复臂的前进端与后退端进行连续往复动作
·由于与 TZ 轴的位置关系,往复臂不能动作时出现错误。
动作模式 说明
料盘箱向指定料槽
位置移动
[功能]
料盘箱向指定料槽位置移动
·由于与 TY 轴的位置关系,料盘箱不能动作时出现错误。
料盘箱连续上下动
作
[功能]
料盘箱的上升端和下降端进行连续往复动作
·料盘单元-LT, LTC时,能够进行料盘箱A, B的连接动作。
·由于与 TY 轴的位置关系,料盘箱不能动作时出现错误。
动作模式 说明
往复臂在指定料槽
位置前进
[功能]
1. 料盘箱向指定料槽位置移动
2. 往复臂向修正 TY 轴移动
动作模式 说明
往复臂收存 [ 功能 ]
前进位置的往复臂向料盘箱内移动
·收存到拉出的料槽上。
8. NXT-2 软件工具 QD142-14
432 NXT II 系统手册
8.9.10 指令列表 (搬运轨道)
指令名
(状态确认)
说明
搬运轨道传感器
状态
能够确认以下的搬运轨道传感器状态。
1. 搬运轨道电路板通过确认传感器 L
2. 搬运轨道电路板通过确认传感器 R
3. 电路板松开确认传感器
4. 搬运轨道支撑销检测传感器
· 机器启动后 1 次也没有开始过自动运转时,不进行动作。请通过
手动指令的操作除去电路板。
指令名
(动作确认)
说明
夹紧 能够确认所指定的通道的电路板夹紧动作。
· 在拉出了模组的状态下不进行动作。
· 机器启动后 1 次也没有开始过自动运转时,不进行动作。请通过
手动指令的操作除去电路板。
松开 能够确认所指定的通道的电路板松开动作。
· 在拉出了模组的状态下不进行动作。
· 机器启动后 1 次也没有开始过自动运转时,不进行动作。请通过
手动指令的操作除去电路板。
导轨 能够确认所指定的导轨的移动动作。
· 在拉出了模组的状态下能够进行确认。
电路板搬运 能够确认所指定的通道的电路板搬运动作。指定要确认的通道和移
动距离后进行。
· 在拉出了模组的状态下能够进行确认。
夹块连续动作 能够以 1 ~ 1,000,000 次的范围连续上下动作指定通道的夹块。
· 想要中止连续动作时,请按下机器的紧急停止按钮。
指令名
(调整)
说明
电路板通过传感
器感度调整
能够调整电路板通过传感器的感度。
QD142-14 8. NXT-2 软件工具
NXT II 系统手册 433
8.9.11 单元配置的参照
Equipment Check 能够在生产中参照被安装在模组中的吸嘴信息、各单元的序列号和固件版
本等的单元配置信息。
参照模组内的吸嘴置放台和吸嘴使用情况
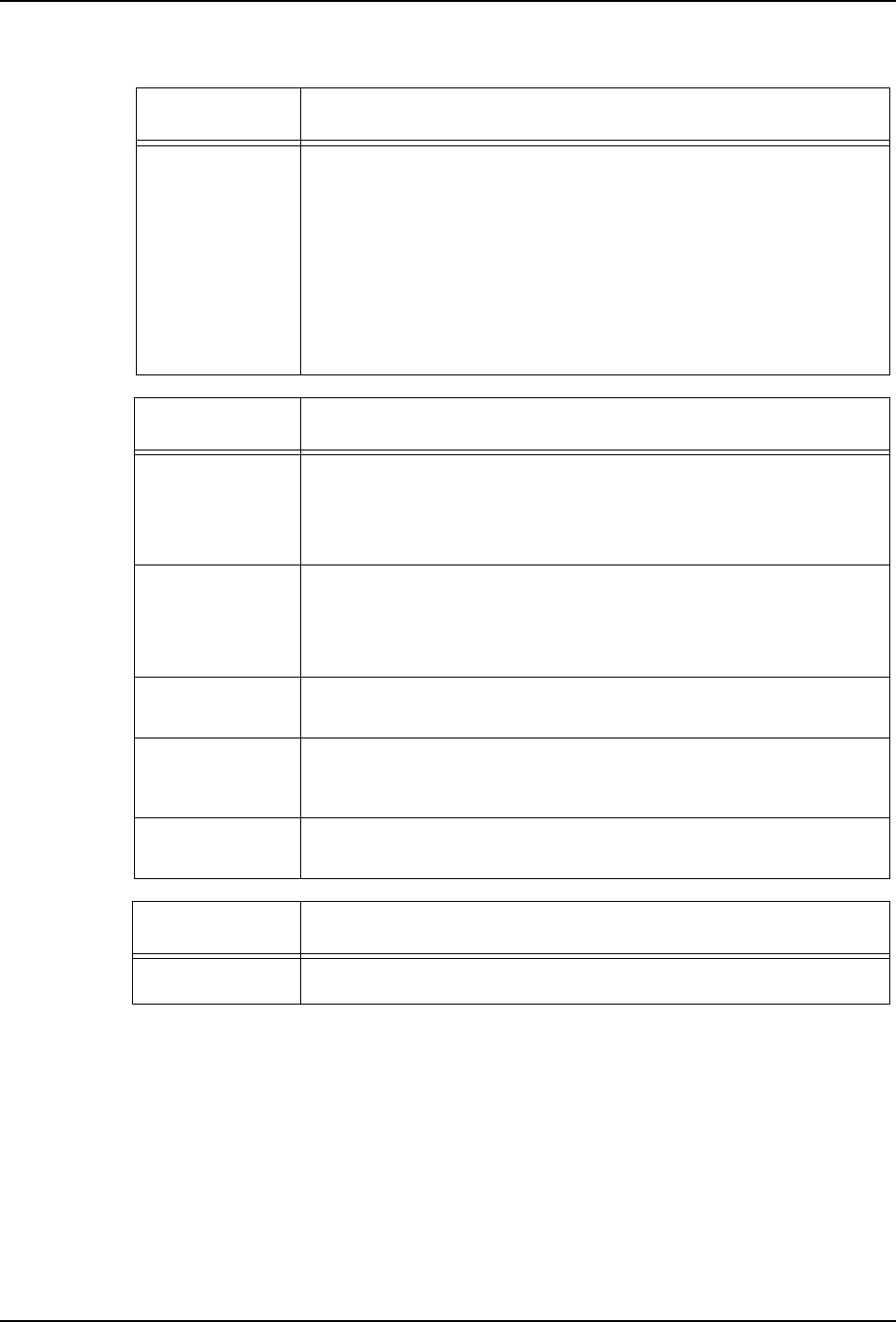
1. 首先,在 [Machine Selection] 内选择对象机器。
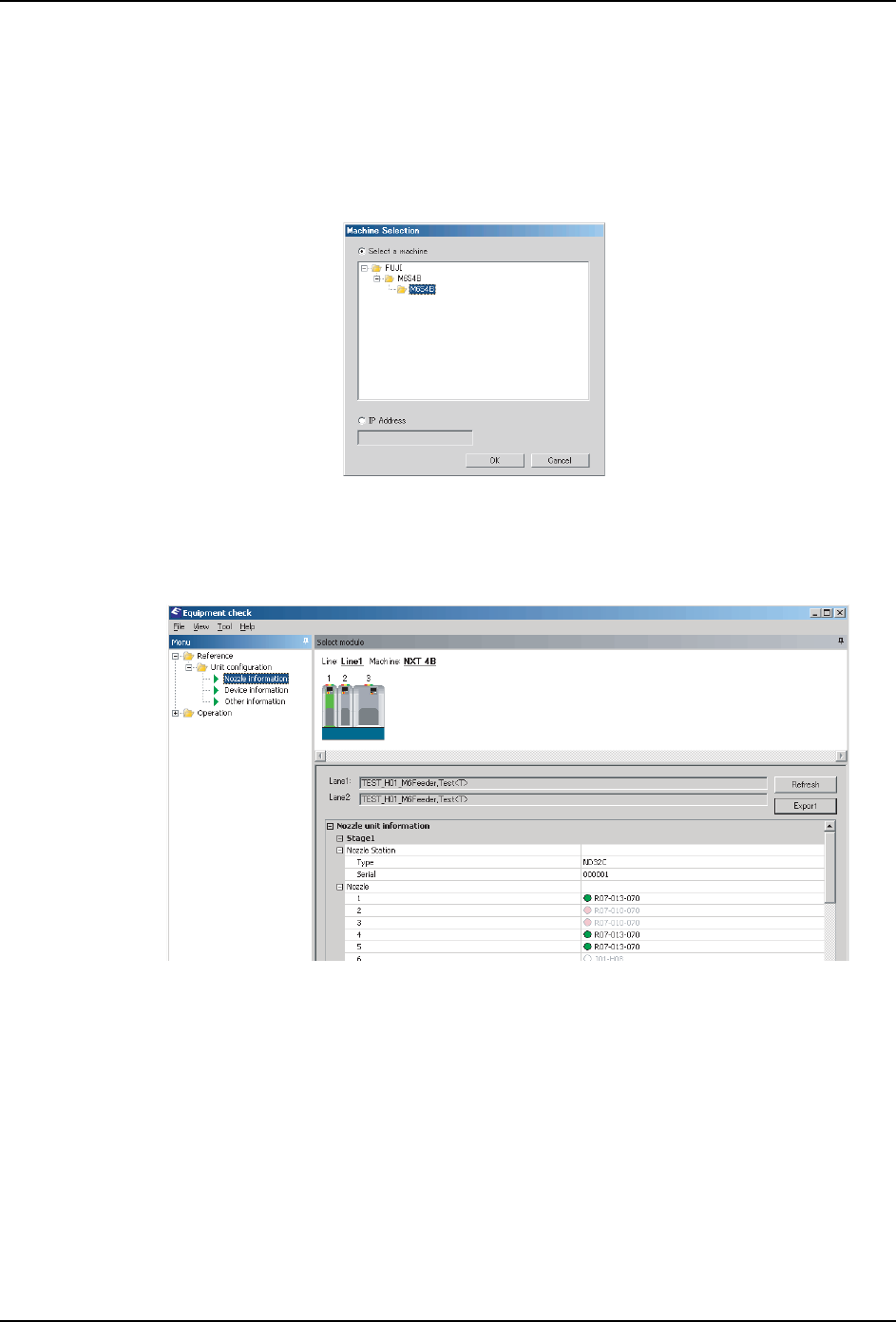
2. 请从 [[Menu] 框内选择 [Unit Configuration]-[Nozzle information]。
3. 请从 [Select module] 框内选择要操作的模组。
[Nozzle unit Information] 被显示。
a. 此处能够参照以下的信息。
·吸嘴置放台信息:单元种类和序列号
·吸嘴信息:单元种类 (或者序列号)和现生产 Job 中的使用情况
b. 变灰的吸嘴表示现生产 Job 中没有被使用。
c. 对于没有被注册在吸嘴规格数据中的吸嘴,仅显示序列号。
01SYS-0347E
01SYS-0348E