00193935-01.pdf - 第107页
SIPLACE HF 系列使用手 冊 3 技術資料 軟體版本 SR.505.xx 05/2004 中 文版 3.6 取置頭 107 3.6.3.3 技術資料 3 6 取置節 / 取置頭附標準元件攝 影機 6 取置節 / 取置頭附 DCA 攝影機 適用元件的範圍 0603 to 32 x 32 mm 2 0201 至 flip-chip、bare die 元件規格 最大高度 最小零件腳距 最小凸塊間距 最小錫球 / 凸塊 Ø 最小尺寸 最…
3 技術資料 SIPLACE HF 系列使用手冊
3.6 取置頭 軟體版本 SR.505.xx 05/2004 中文版
106
Æ 6 取置節 / 取置頭有 3 個軸- DR 或星形軸、Z 軸以及 DP 軸。
Æ 星形軸以它的 6 個取置節在星形軸上轉動。取置節會固定套管 (sleeve)。每個套管 (sleeve) 上則有一
個吸嘴,而零件即由吸嘴拾取,並將它從拾取 / 置放位置 (1) 送到拋料位置 (2)、到光學定位位置
(4) 或者到角度旋轉位置 (5)。
Æ Z軸可進行垂直移動。在星形軸底部位置 (1) 的每個套管 (sleeve)即由這個軸升高或降低,藉以將元
件從輸送帶上拾取並放置到 PCB 上。Z 軸是一個 " 智慧軸 "。它會 " 記住 " 每個輸送軌道的拾取
高度及每個元件的置放高度。這可以加速取置程序。而設定的取置力則會保持固定。
Æ DP 軸會將以光學方式定位的元件轉動到想要的取置角度。轉動及平移軸的移動順序由控制迴路
控制。位置及速度感知器會傳送實際的軸移動值給軸控制裝置。這個實際值會跟設定值進行比
對,並用來決定伺服放大器的力道及速度參數,並據此來執行軸的移動。吸嘴上的真空值在整
個拾取與置放過程中會持續受到檢查,以盡可能將取置錯誤率保持到最低。
SIPLACE HF 系列使用手冊 3 技術資料
軟體版本 SR.505.xx 05/2004 中文版 3.6 取置頭
107
3.6.3.3 技術資料
3
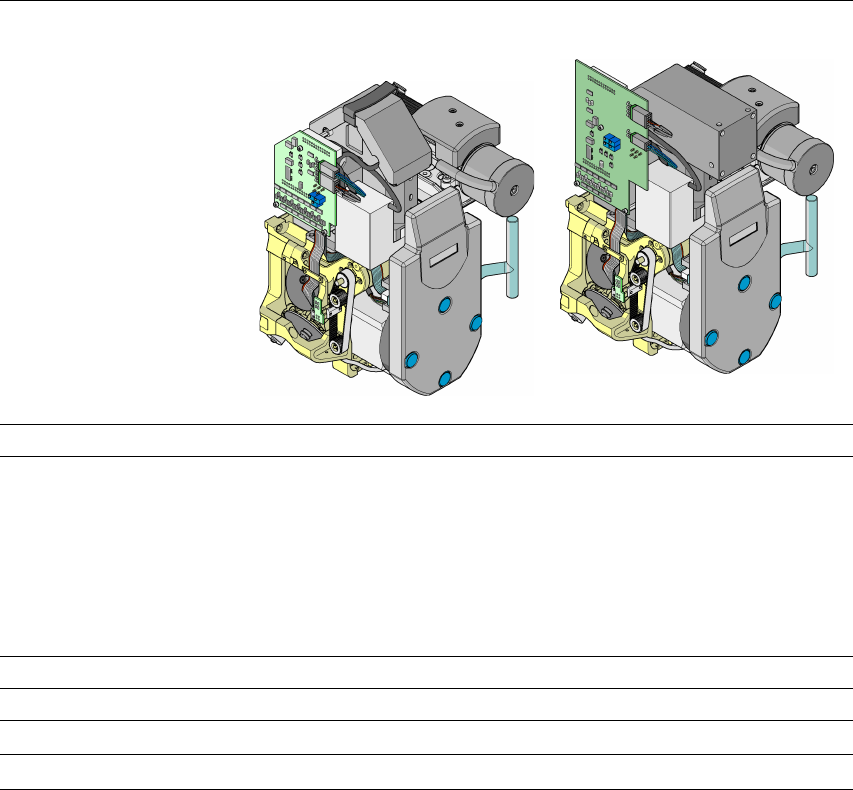
6 取置節 / 取置頭附標準元件攝
影機
6 取置節 / 取置頭附 DCA 攝影機
適用元件的範圍
0603 to 32 x 32 mm
2
0201 至 flip-chip、bare die
元件規格
最大高度
最小零件腳距
最小凸塊間距
最小錫球 / 凸塊 Ø
最小尺寸
最大尺寸
最大重量
8.5 mm
0.5 mm
0.56 mm
0.32 mm
1.6 x 0.8 mm
2
32 x 32 mm
2
5 g
8.5 mm
0.4 mm
0.2 mm
0.11 mm
0.6 x 0.3 mm
2
13 x 13 mm
2
5 g
可設定置放力 2.4 N - 5.0 N 2.4 N - 5.0 N
吸嘴型式 8 xx, 9 xx 8 xx, 9 xx
X/Y 精確度 ± 60 µm (4 σ) ± 55 µm (4 σ)
角度精確度 ± 0.3°/4 σ ± 0.3°/4 σ
3 技術資料 SIPLACE HF 系列使用手冊
3.6 取置頭 軟體版本 SR.505.xx 05/2004 中文版
108
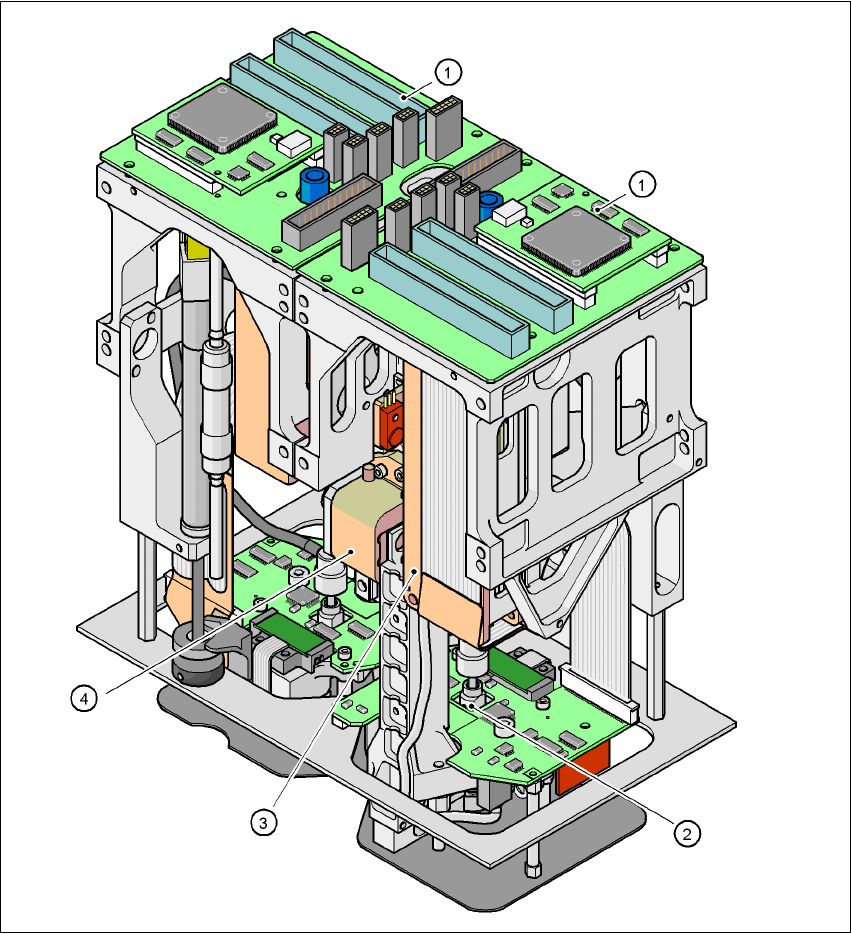
3.6.4 高精密 IC 取置用 SIPLACE 雙取置頭 (TwinHead)
3
圖 3.6 - 9 高精密 IC 取置用雙取置頭 (TwinHead)
3
(1) 拾取及置放模組-雙取置頭 (TwinHead) 包含有 2 個拾取及置放模組
(2) DP 軸
(3) Z 軸驅動裝置
(4) Z 軸的步進距離測量系統