00193935-01.pdf - 第109页
SIPLACE HF 系列使用手 冊 3 技術資料 軟體版本 SR.505.xx 05/2004 中 文版 3.6 取置頭 109 3.6.4.1 說明 這個精密的取置頭由兩個相同型 式的取置頭連結在一起 ( 雙取置頭 ) 所構成。這兩個取置頭都 採用 拾取及置放的原理作用 。 雙取置頭適合用來處理特別困難的或者大型的元件 。 取置頭可以拾取兩個 元件 , 以光學方式定位在前進到取 置位置的位置上 , 並轉動到所需的取置角度 。 元件接…
3 技術資料 SIPLACE HF 系列使用手冊
3.6 取置頭 軟體版本 SR.505.xx 05/2004 中文版
108
3.6.4 高精密 IC 取置用 SIPLACE 雙取置頭 (TwinHead)
3
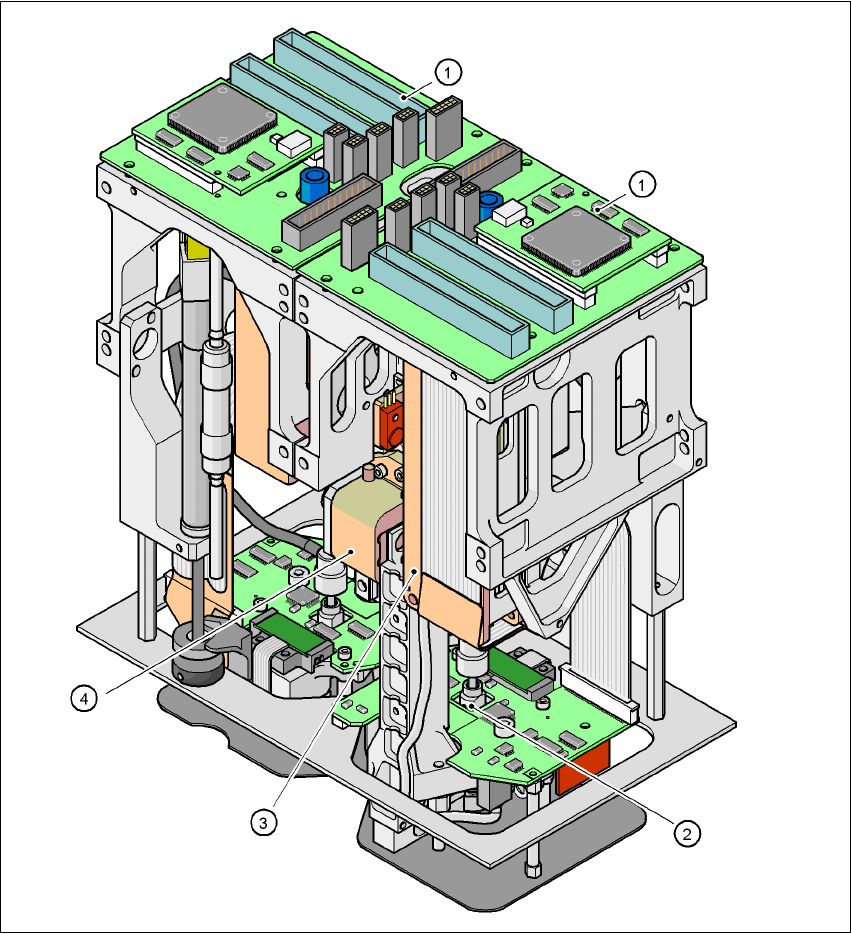
圖 3.6 - 9 高精密 IC 取置用雙取置頭 (TwinHead)
3
(1) 拾取及置放模組-雙取置頭 (TwinHead) 包含有 2 個拾取及置放模組
(2) DP 軸
(3) Z 軸驅動裝置
(4) Z 軸的步進距離測量系統

SIPLACE HF 系列使用手冊 3 技術資料
軟體版本 SR.505.xx 05/2004 中文版 3.6 取置頭
109
3.6.4.1 說明
這個精密的取置頭由兩個相同型式的取置頭連結在一起 ( 雙取置頭 ) 所構成。這兩個取置頭都採用
拾取及置放的原理作用。雙取置頭適合用來處理特別困難的或者大型的元件。取置頭可以拾取兩個
元件,以光學方式定位在前進到取置位置的位置上,並轉動到所需的取置角度。元件接著會以精密
控制的吹氣方式輕盈而精確的放置到 PCB 上。
我們已經針對雙取置頭 (TwinHead) 開發有新的吸嘴 (type 5xx)。它也可以裝配一個轉接頭,並使用
拾取及置放頭的 type 4 吸嘴及收取及置放頭的 type 8xx 與 9xx 吸嘴。
檢查及自我學習功能 3
透過各種檢查及自我學習功能,雙取置頭 (TwinHead) 的可靠性可以進一步提昇。
- 例如,吸嘴的真空檢查,可以顯示元件是否正確的拾取及置放。
- 高解析度、智慧檢視模組 ( 例如細間距及倒裝晶片檢視模組 ) 會辨識並修正與想要的元件位置之
間的細微誤差,據此保證正確的取置位置。元件攝影機永久固定在機架上。
- 它也會檢查元件的封裝型式,如果元件據此所測定的幾何資料與預設的資料不同,則不會進行
取置。
- 一個力道感知器會測量並監控指定的元件取置力。
- 如果壓縮空氣或動力失效,垂直軸 (Z 軸 ) 會升高到安全位置以避免取置頭發生撞擊。
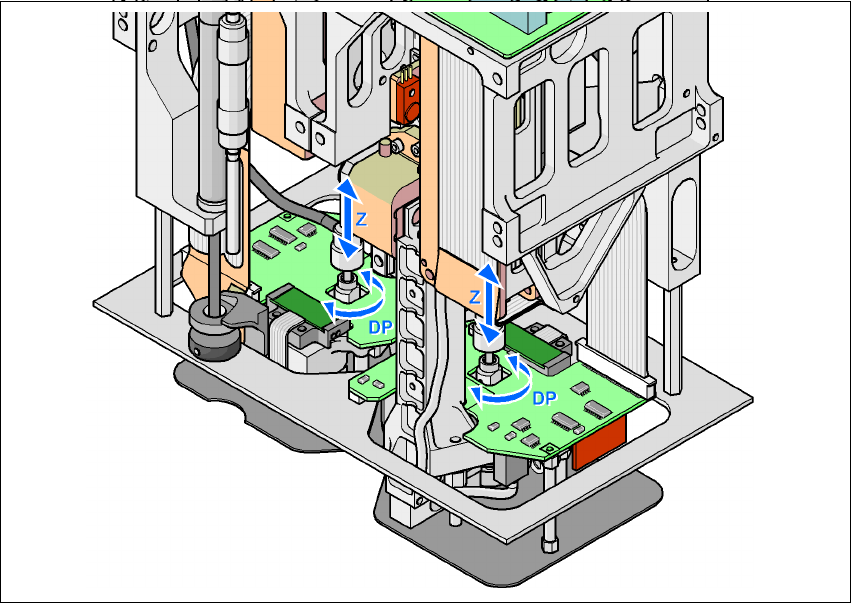
3.6.4.2 功能的說明
雙取置頭 (TwinHead) 包括有兩個拾取及取置頭,兩者彼此連結在一起,但分別進行控制。每個取
置頭有兩個軸- Z 軸及 DP 軸 ( 參閱圖 3.6 - 8
)。
Z軸的移動路徑會透過一個高解析度的線性步進測量系統進行偵測。Z 軸可進行垂直移動。一個線
性馬達負責升高及降低 Z 軸,而元件則從輸送帶或料盤上拾取並放下到 PCB 上。Z 軸是一個 " 智慧
軸 "。它會 " 記住 " 輸送帶及料盤的拾取高度及每個元件的置放高度。這可以加速取置程序。設定
的取置力會由力道感知器進行測量及監控。
3 技術資料 SIPLACE HF 系列使用手冊
3.6 取置頭 軟體版本 SR.505.xx 05/2004 中文版
110
DP 軸會將以光學方式定位的元件轉動到想要的取置角度。轉動軸是以步進馬達驅動。馬達軸被設
計成為一個套管 (sleeve)。頂端是一個光學尺可用來進行角度分析,而吸嘴固定裝置則設於底端。
轉動及平移軸的移動順序由控制迴路控制。位置及速度感知器會傳送實際的軸移動值給軸控制裝
置。這個實際值會跟設定值進行比對,並用來決定伺服放大器的力道及速度參數,並據此來執行軸
的移動。
吸嘴上的真空值在整個拾取與置放過程中會持續受到檢查,以盡可能將取置錯誤率保持到最低。
3
圖 3.6 - 10 功能的說明