AIM機械手冊.pdf - 第274页
9. 传感器的调整 QD053-07 258 AIM 机械手册 9.1.10 机上 PAM 的限制事宜 测定时有以下的限制。 · 1 次执行时,对于 1 工作头在平台 1 和平台 2 的两侧进行测定 。 ·在操作画面上显示的测定结果 上显示为 "NaN" 时 ,有可能发生影 像处理异常。在 结果文件中存在 " NaN" 时,请仅将其数 据设定为无效。
QD053-07 9. 传感器的调整
AIM 机械手册 257
9.1.9 关于样品 job 「PAM_Sample」
样品 job 收存在附加软件的安装 CD 中。
样品 job 的概要
a. 样品 Job 执行 1 次,测定时使用的元件数如下所示。
·H01 吸嘴工作头 32 个 (玻璃元件)
·H04 吸嘴工作头 64 个 (玻璃元件)
·H08 吸嘴工作头 256 个 (角芯片)
·H12S 吸嘴工作头 288 个 (角芯片)
b. 玻璃元件的 Part Data 用 「miniGlass」作成。另外带有料盘单元 -L 的模组专用的
PartData,用 「miniGlass_MTU」作成。Package Name 在供料器 (D1204)和料盘
(SQFP64)时不同。
PAM 测定模式的判断
是否进行角芯片的测定还是进行玻璃元件测定的判断由 job 进行。以使用的 Configuration-
Feeder Setup 的第一个料带宽度是 8mm 的料带时作为角芯片,8mm 料带以外时作为玻璃元件
来判断。因此,玻璃元件的料带宽度设定为 12mm。此外,带有料盘单元 -L 的模组自动地判
断为玻璃元件测定。
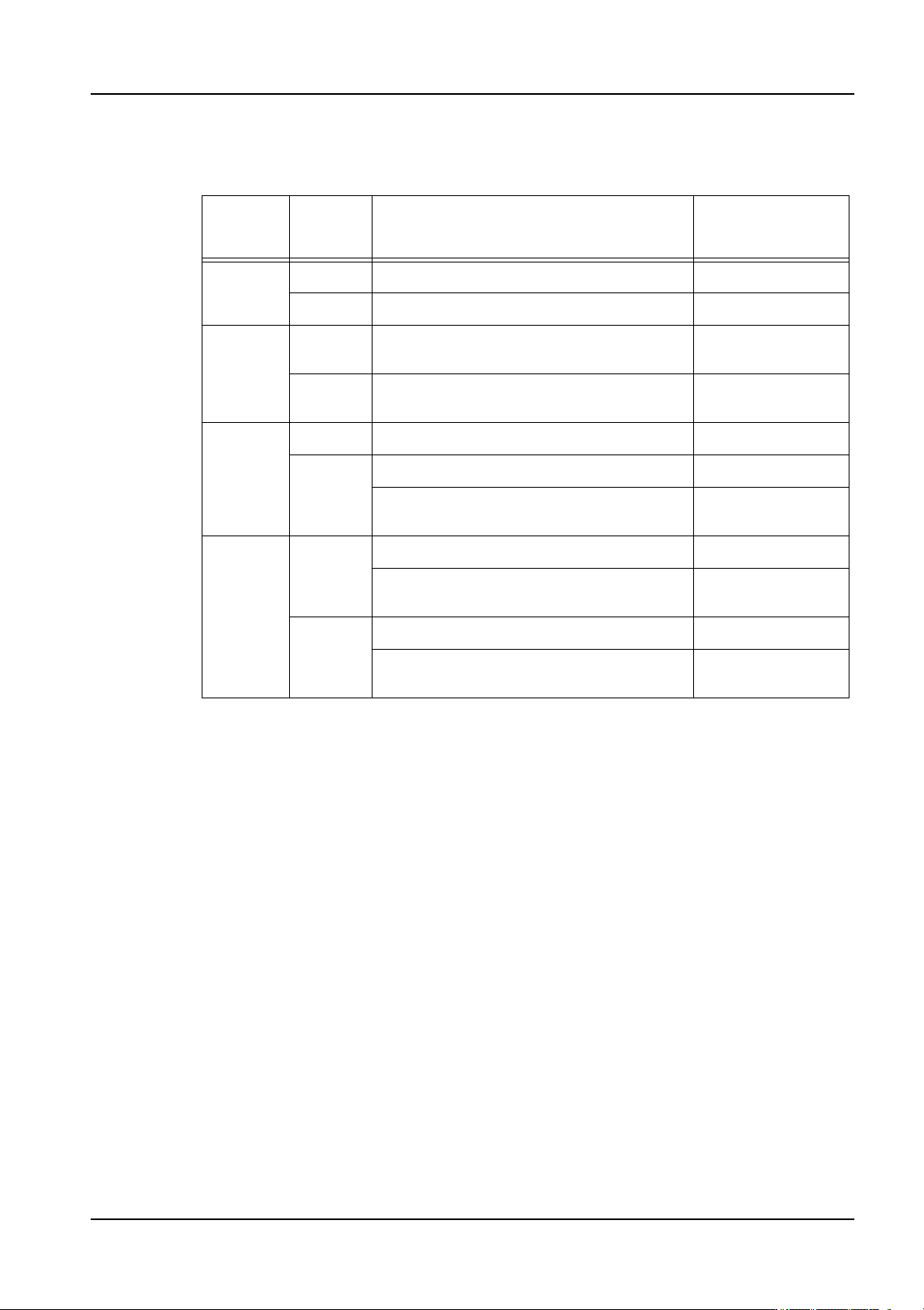
工作头种
类
测定对
象工作
头
样品 Job 名 备注
H12S 吸
嘴工作头
工作头 1 KIJYO_H12s_Head1 ~ GH12s+H12s ~ 9.JOB
工作头 2 KIJYO_H12s_Head2 ~ GH12s+H12s ~ 9.JOB
H08 吸嘴
工作头
工作头 1 KIJYO_H08_Head1 ~ GH08+H08 ~ 512 ~
11.JOB
工作头 2 KIJYO_H08_Head2 ~ GH08+H08 ~ 512 ~
11.JOB
H04 吸嘴
工作头
工作头 1 GSS_H04_Head1 ~ GH04+H04_64 ~ 10.JOB
工作头 2 GSS_H04_Head2 ~ GH04+H04_64 ~ 10.JOB
GSS_H04_Head2-tray ~ GH01+H04_64 ~
10.JOB
在 Stage2 是料盘 L
H01 吸嘴
工作头
工作头 1 GSS_H01_Head1 ~ GH01+H01_32 ~ 10.JOB
GSS_H01_Head1-tray ~ GH01+H01_32 ~
10.JOB
在 Stage2 是料盘 L
工作头 2 GSS_H01_Head2 ~ GH01+H01_32 ~ 10.JOB
GSS_H01_Head2-tray ~ GH01+H01_32 ~
10.JOB
在 Stage2 是料盘 L

9. 传感器的调整 QD053-07
258 AIM 机械手册
9.1.10 机上 PAM 的限制事宜
测定时有以下的限制。
·1 次执行时,对于 1 工作头在平台 1 和平台 2 的两侧进行测定。
·在操作画面上显示的测定结果上显示为 "NaN" 时,有可能发生影像处理异常。在
结果文件中存在 "NaN" 时,请仅将其数据设定为无效。

QD053-07 9. 传感器的调整
AIM 机械手册 259
9.2 搬运轨道进入传感器·送出传感器
搬运轨道电路板传感器是透过式传感器,可以自动地进行灵敏度的调节以便在即使改变搬运
轨道宽度时也可以正确地进行检测。在发生故障时取出电路板等、用手动改变搬运轨道宽度
时,传感器自动调节灵敏度功能被解除并显示错误信息。此时,请按以下中的某一种方法恢
复自动调节灵敏度。
a. 旋转滚珠丝杆使搬运轨道宽度趋向狭窄的方向。(一边看显示在传感器上的进光量一
边使其显示为正值进行旋转。正值显示后自动调节灵敏度功能恢复。)
b. 使用附加软件安装传感器灵敏度。(参考 " 9.2.1 远程调整方法 "。)
c. 使用机器上的安装器放大器,安装传感器灵敏度。(参考 " 9.2.2 机器上的调整方法
"。)
9.2.1 远程调整方法
使用附加软件调整传感器的灵敏度。用此方法 1 次就可以调整在模组上所有的搬运轨道传感
器。
1. 启动附加软件,请从 「前台显示屏」中选择对象的机器的名称。显示出注册画面。
2. 请直接输入用户 ID 或者从指定的选择框中指定。
3. 请正确地输入密码后单击 「注册」。
4. 选择进行调整传感器的模组后单击 「远程操作」。
5. 请选择 「调整搬运轨道传感器的灵敏度」。
6. 请确认电路板等的传感器是否有遮住后按下 「开始」按钮。进行选择模组的电路板通过
传感器的灵敏度的调整。