ALeaderAOI-Ver 4.0.pdf - 第10页
距离。该算法主 要用于电 容元件的缺件等 缺陷方面的检测 。其在检 测算法中的算法 标志为“ Length” 。 1.3.7. 红胶 算法 红胶算法 红胶算法 红胶算法 红胶算法, 就是指分 析和获取元件焊 盘区域 (铜箔区间) 上发生溢胶的数量 的色彩统计算法 。该 算法为 色彩特征分析算 法, 其中红胶的图像 特征为暗红色 ,铜箔的图像特征为 亮红色, 主要是通过 分析铜箔区域 中 存在的红胶点。 如下图: ①区域主要为红 胶,红胶…
1.3.3. 直方图统计算法
直方图统计算法直方图统计算法
直方图统计算法
直方图统计算法,就是指通过统计 ROI 区域内的亮度分布,或者是亮度变化,来判断和检测待测点是否
符合标准范围的灰阶处理分析算法。该算法包括最大值(Max)算法、最小值(Min)算法、亮度跨度(Range)
算法和平均值算法。其在检测算法中的算法标志为“Histogram”。
最大值算法,就是指 ROI 区域内,获取亮度最大的 N%的亮度点的亮度平均值的一种灰阶统计算法。如目
标区域共计 1000 个亮度点,亮度值最大的 5%的亮度点,即 50 个亮度点,该 50 个点的亮度均值为 200,则
最大值算法的返回值为 200,则图像的最大值为 200。该算法主要用于异物等缺陷方面的检测。
最小值算法,就是指 ROI 区域内,获取亮度最小的 N%的亮度点的亮度平均值的一种灰阶统计算法。如目
标区域共计 1000 个亮度点,亮度值最小的 5%的亮度点,即 50 个亮度点,该 50 个点的亮度均值为 20,则最
大值算法的返回值为 20,则图像的最大值为 20。该算法主要应用于异物等缺陷的检测。
亮度跨度算法,就是指 ROI 区域内,统计最大值与最小值的亮度差异的一种灰阶统计算法。如,目标区
域的最大值为 200,最小值为 20,则亮度跨度为 180。该算法主要应用于缺件等缺陷的检测。
平均值算法,就是指统计 ROI 区域内所有亮度点的平均亮度的一种灰阶统计算法,该算法主要应用于缺
件等缺陷的检测。
1.3.4. OCV 算法
算法算法
算法
OCV,是指通过分析和获取待测图像的轮廓线与标准样本的轮廓线相似程度的一种图像处理算法。该算
法主要是分析轮廓,给出轮廓拟合程度,来检测和判定待测点。该算法主要应用于错件、缺件等缺陷方面的
检测。其在检测算法中的算法标志为“OCV”。
1.3.5. Match 算法
算法算法
算法
Match 算法,就是指通过分析待测图像的 ROI 图像点和标准样本的 ROI 图像点的相似程度的一种图像处
理算法。该算法主要应用于定位、错件、缺件等缺陷方面的检测。其在检测算法中的算法标志为“Match”。
1.3.6. Length 算法
算法算法
算法
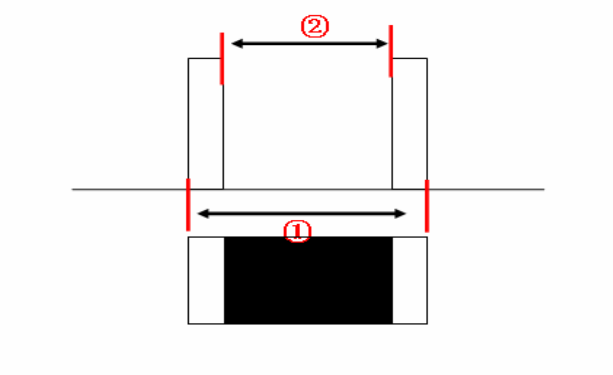
Length 算法,为长度测量算法,就是指测量间隔亮度区域之间的距离的算法。该算法分为内距法、外距
法。该算法首先对 ROI 区域进行亮度投影,通过统计和计算投影直方图亮度区域之间的距离,如下图:
①表示外距法,就是指两个亮度区域外边界之间的距离;②表示内距法,就是指两个亮度区域内边界之间的
距离。该算法主要用于电容元件的缺件等缺陷方面的检测。其在检测算法中的算法标志为“Length”。
1.3.7. 红胶算法
红胶算法红胶算法
红胶算法
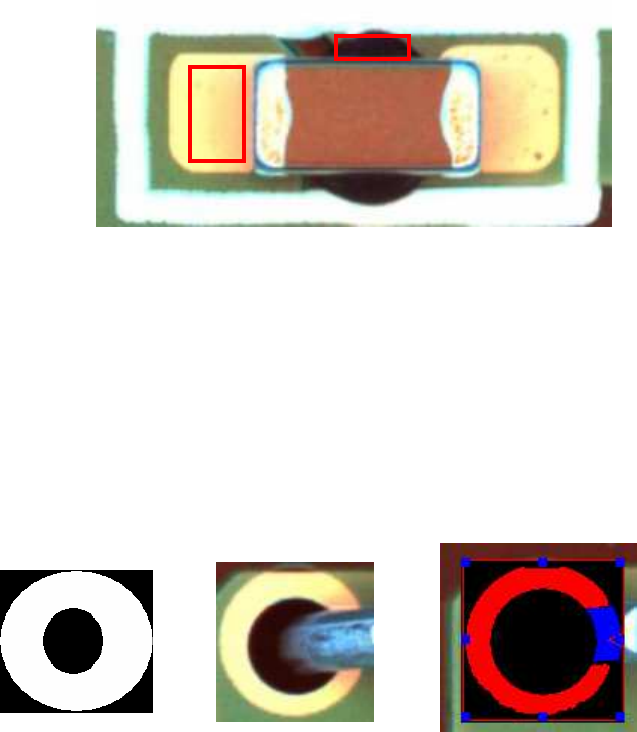
红胶算法,就是指分析和获取元件焊盘区域(铜箔区间)上发生溢胶的数量的色彩统计算法。该算法为
色彩特征分析算法,其中红胶的图像特征为暗红色,铜箔的图像特征为亮红色,主要是通过分析铜箔区域中
存在的红胶点。如下图:
①区域主要为红胶,红胶的图像特征为亮度低、色彩主通道为红色;②区域溢胶发生区域,色彩为亮红色,
特征为亮度高,色彩主通道为红色。当②区域中存在红胶色彩特征时,则判定为“溢胶”。该算法在算法选
择中的标志为“Glue”。
1.3.8. Hole 算法
算法算法
算法
Hole 算法,是指在红胶板检测中,检测 DIP 元件插孔是否具备插件的一种有效的图像处理算法。该算法
分为二个步骤。首先是椭圆圆环定位,该定位方式是在椭圆中屏蔽插圆形孔区域,建立搜索模板,如下:
①区域为定位模板,其中白色区域为有效区域,参与搜索定位,②区域为①区域的标准原图。最后在搜索定
位后,检测插件的椭圆圆环上是否具备插件特征,见③区域,蓝色成分为引脚成分。该算法在算法选择中的
标志为“Hole”。
1.3.9. OCR 算法
算法算法
算法
OCR 算法,即字符识别算法,是专门针对字符识别和检测的一种有效的图像处理算法。OCR 算法分为 2 个
部分,首先,要训练足够的样本(8 个),生成标准字符库,供字符识别使用;再次,调用已生产的标准字符
库,对待测字符进行识别,判定待测字符是否符合标准。OCR 算法,一般应用在重要元件的识别,如 BGA、
QFP、SOP 等。
1.3.10. 短路算法
短路算法短路算法
短路算法
短路算法,是检测 ROI 区域之间是否发生链接的图像处理算法。短路算法在 AOI 中的检测可为分二种,
其一是消除背景,其二是保留背景。Aleader AOI 采用的为消除背景方式,检测 2 个检测点区域是否发生通
①
①①
①
②
②②
②
①
①①
① ②
②②
② ③
③③
③
路。如下:
①与②之间没有发生短路。而③与④之间发生了短路。短路算法在算法选择的标志是为“Short”。
1.3.11. CREST 算法
算法算法
算法
CREST 算法,是波峰焊检测中关于插件检测的图像处理算法。CREST 算法,是一个综合性的算法,包括
定位、无引脚、少锡、包锡和锡洞等检测项,每个检测项针对不用的检测算法。
波峰焊的插件可分为非极性插件、极性插件和不定向插件。非极性插件是指的引脚方向是垂直向上的,
并且方向固定的插件;极性插件是指引脚方向斜向下,并且方向固定的插件;不定向插件是指引脚方向不固
定的插件。在插件检测中,可分为非极性插件检测、极性插件检测和不定向插件检测。
定位,波峰焊中的插件变化大,常规的定位方式不适合 插件的定位,所以 CREST 的定位算法,为特色
的定位的方式。该定位方式分为 2 步,其一是创建定位模板,该定位模板一般为椭圆形;其二是提取焊锡,
将焊锡之外的色彩设置为背景。利用在提取焊锡的搜索图中查找与模板拟合最好的区域。提取焊锡的参数如
下:
类型
类型类型
类型 参数说明
参数说明参数说明
参数说明
蓝色下限
当前成分点中,蓝色通道为主要色彩通道,当蓝色通道的亮度值大于蓝色下限时,则该
成分点位为焊盘成分点,否则为背景成分点。默认值为
默认值为默认值为
默认值为 60,最小可降低至 40。
绿色下限
当前成分点中,绿色通道为主要色彩通道,当绿色通道的亮度值大于绿色下限时,则该
成分点位为焊盘成分点,否则为背景成分点。默认值为
默认值为默认值为
默认值为 220。
红色下限
当前成分点中,红色通道为主要色彩通道,当红色通道的亮度值大于红色下限时,则该
成分点位为焊盘成分点,否则为背景成分点。默认值为
默认值为默认值为
默认值为 230。
亮度上限
当前成分点中,最小通道值小于亮度上限时,则该成分点位焊盘成分点,否则为背景成
分点。默认值为
默认值为默认值为
默认值为 255,当背景有高亮度白色背景时,可降低该参数,过滤白色背景。
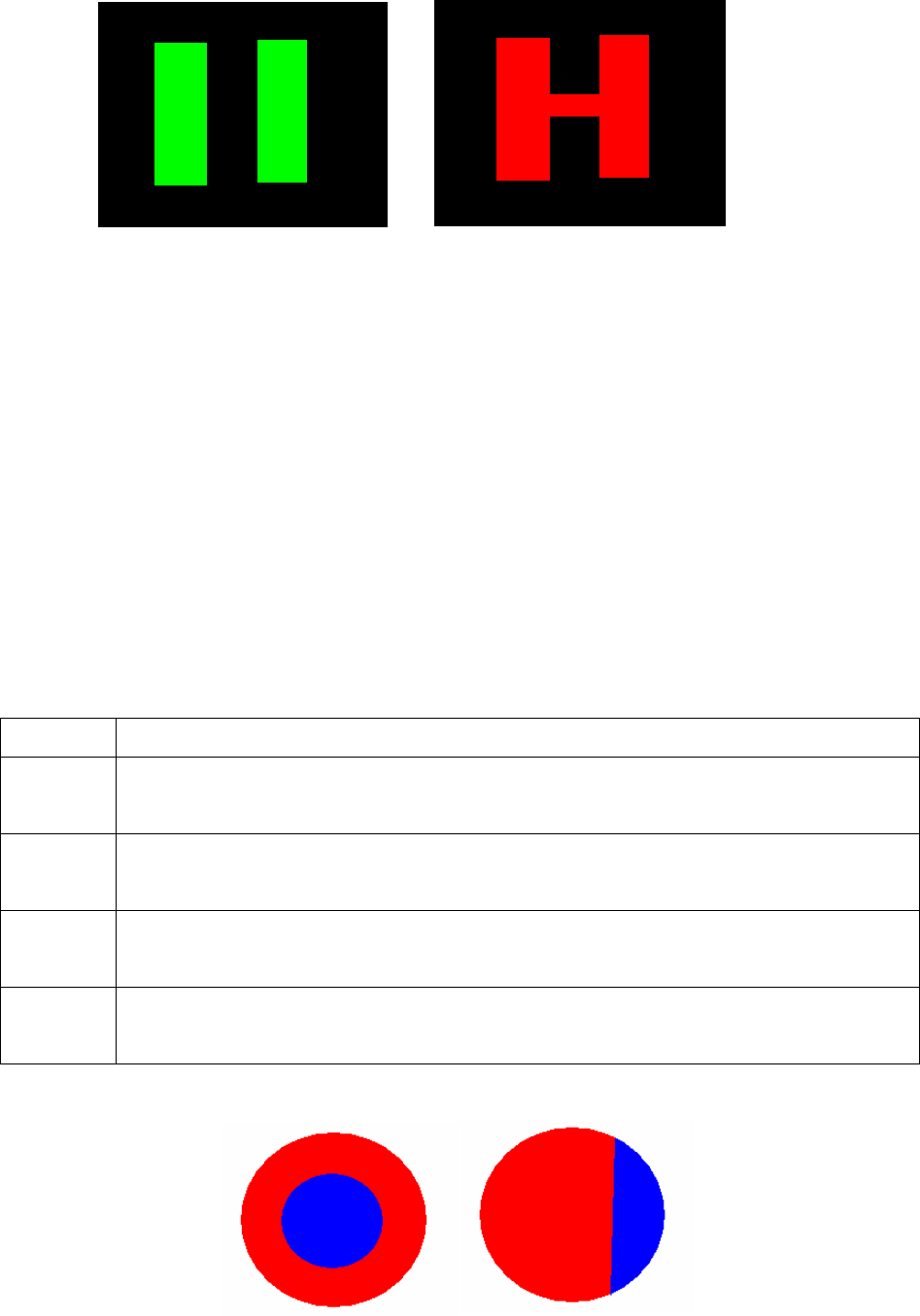
无引脚,是指检测波峰焊插件中是否具备引脚的图像处理算法。该算法是检测插件的引脚发生区域是否
具备引脚,如下图:
见上图,①图中的蓝色区域为非极性插件的引脚发生区域,②图中的蓝色区域为极性插件的引脚发生区域。
引脚发生区域中引脚成分的抽取是采用色彩抽取算法,引脚成分的色彩特征是色彩亮度低,并且色彩的色度
为蓝色。利用该特征,确定抽色参数,抽取引脚成分。
少锡,是指检测插件的焊盘的焊锡量是否足够的图像处理算法。该算法采用的色彩抽取算法。焊锡在波
峰焊的特征为图像具备一定的亮度,并且色度偏青色、偏蓝色。根据焊锡的色彩特征,确定抽色参数,抽取
①
①①
①
②
②②
②
③
③③
③ ④
④④
④
①
①①
①
②
②②
②