ALeaderAOI-Ver 4.0.pdf - 第9页
1.3.3. 直方 图统计算法 直方图统计算法 直方图统计算法 直方图统计算法 直方图统计算法 ,就 是指通过统计 ROI 区域内的亮 度分布, 或者是亮度 变化, 来判断和检测 待测点是 否 符合标准范围的 灰阶处理 分析算法。 该算法包括 最大值 (Max) 算法、 最小值 (Min) 算法、 亮度跨度 (Range) 算法和平均值算 法。其在 检测算法中的算 法标志为“Hist ogram” 。 最大值算法, 就是指 ROI 区域…
B 元件会发生什么样的变化?
即元件的自然尺寸、形状、颜色和表面图案等变化规律。
C 元件外形会变化多少?
即元件的尺寸、形状、颜色、表面图案等变化多少是合理的。
最后得到的是一个综合了上述元素的介于 OK 与 NG 间用于测试的标准模型。
1.3.2. 色彩抽取算法
色彩抽取算法色彩抽取算法
色彩抽取算法
色彩抽取算法,就是指抽取符合设定色度范围和亮度范围的图像抽取算法,主要用于抽取图像的色彩特
征。色彩抽取算法,就是指亮度抽取算法 + 色度抽取算法。首先,待测色彩点必需符合亮度特征,即待测
色彩点的亮度必需处于标准亮度范围(亮度下限,亮度上限);其次,待测色彩点的色度必需符合色度特征,
即待测色彩点的色度要处于标准色度范围。该算法在 AOI 检测算法中的算法标志为“TOC”,主要应用于少锡、
空焊、错件、缺件、锡少、露铜等缺陷方面的检测。
色彩抽取算法的判定,就是指符合标准亮度,并且符合标准色度范围的色彩点占 ROI 区域的比例,是否
符合标准范围。比如 ROI 区域的实际返回值为 82%,而标准范围为(50, 100),则该检测点为 OK 点。
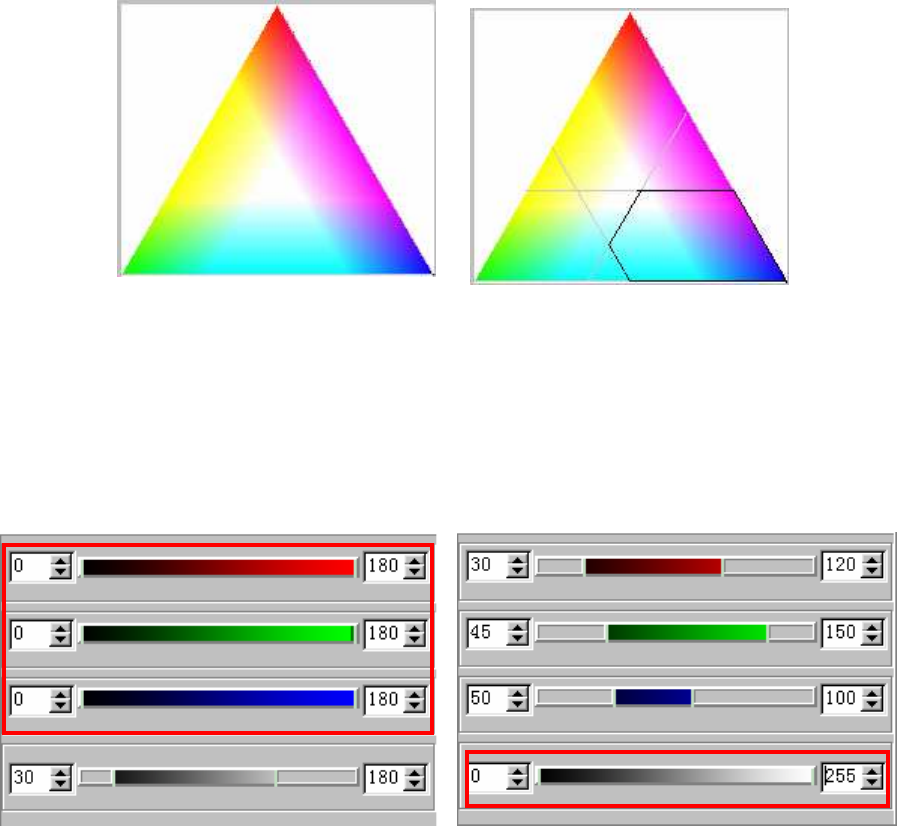
色彩抽取算法中,在图像上表示为色度三角形。该色度三角形在色彩抽取算法中起着重要的辅助作用,
其图像示意图如下:
上图①为色度三角形,该色度三角形,可以表示任意的色度范围,如炉后焊锡中的“少锡”,如②图,所表
示的色度范围:红色色度(0, 60),绿色色度(0, 90),蓝色色度(65, 180)。
色彩抽取算法,能够通过改变其参数,转化为亮度抽取算法和色度抽取算法。亮度抽取算法,将标准范
围中的红绿蓝的色度范围都设定为(0, 180),仅仅通过标准亮度范围来抽取符合亮度的色彩点,如下图①;
色度抽取算法,将标准范围中的亮度范围设定为(0,255),通过其色度范围来抽取符合色度的色彩点,如
下图②。如下:
①图为亮度抽取算法的参数示意图,②为色度抽取算法的示意图。
①
①①
①
②
②②
②
①
①①
①
②
②②
②
1.3.3. 直方图统计算法
直方图统计算法直方图统计算法
直方图统计算法
直方图统计算法,就是指通过统计 ROI 区域内的亮度分布,或者是亮度变化,来判断和检测待测点是否
符合标准范围的灰阶处理分析算法。该算法包括最大值(Max)算法、最小值(Min)算法、亮度跨度(Range)
算法和平均值算法。其在检测算法中的算法标志为“Histogram”。
最大值算法,就是指 ROI 区域内,获取亮度最大的 N%的亮度点的亮度平均值的一种灰阶统计算法。如目
标区域共计 1000 个亮度点,亮度值最大的 5%的亮度点,即 50 个亮度点,该 50 个点的亮度均值为 200,则
最大值算法的返回值为 200,则图像的最大值为 200。该算法主要用于异物等缺陷方面的检测。
最小值算法,就是指 ROI 区域内,获取亮度最小的 N%的亮度点的亮度平均值的一种灰阶统计算法。如目
标区域共计 1000 个亮度点,亮度值最小的 5%的亮度点,即 50 个亮度点,该 50 个点的亮度均值为 20,则最
大值算法的返回值为 20,则图像的最大值为 20。该算法主要应用于异物等缺陷的检测。
亮度跨度算法,就是指 ROI 区域内,统计最大值与最小值的亮度差异的一种灰阶统计算法。如,目标区
域的最大值为 200,最小值为 20,则亮度跨度为 180。该算法主要应用于缺件等缺陷的检测。
平均值算法,就是指统计 ROI 区域内所有亮度点的平均亮度的一种灰阶统计算法,该算法主要应用于缺
件等缺陷的检测。
1.3.4. OCV 算法
算法算法
算法
OCV,是指通过分析和获取待测图像的轮廓线与标准样本的轮廓线相似程度的一种图像处理算法。该算
法主要是分析轮廓,给出轮廓拟合程度,来检测和判定待测点。该算法主要应用于错件、缺件等缺陷方面的
检测。其在检测算法中的算法标志为“OCV”。
1.3.5. Match 算法
算法算法
算法
Match 算法,就是指通过分析待测图像的 ROI 图像点和标准样本的 ROI 图像点的相似程度的一种图像处
理算法。该算法主要应用于定位、错件、缺件等缺陷方面的检测。其在检测算法中的算法标志为“Match”。
1.3.6. Length 算法
算法算法
算法
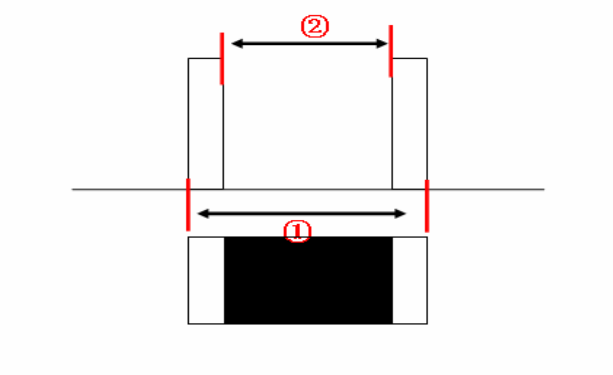
Length 算法,为长度测量算法,就是指测量间隔亮度区域之间的距离的算法。该算法分为内距法、外距
法。该算法首先对 ROI 区域进行亮度投影,通过统计和计算投影直方图亮度区域之间的距离,如下图:
①表示外距法,就是指两个亮度区域外边界之间的距离;②表示内距法,就是指两个亮度区域内边界之间的
距离。该算法主要用于电容元件的缺件等缺陷方面的检测。其在检测算法中的算法标志为“Length”。
1.3.7. 红胶算法
红胶算法红胶算法
红胶算法
红胶算法,就是指分析和获取元件焊盘区域(铜箔区间)上发生溢胶的数量的色彩统计算法。该算法为
色彩特征分析算法,其中红胶的图像特征为暗红色,铜箔的图像特征为亮红色,主要是通过分析铜箔区域中
存在的红胶点。如下图:
①区域主要为红胶,红胶的图像特征为亮度低、色彩主通道为红色;②区域溢胶发生区域,色彩为亮红色,
特征为亮度高,色彩主通道为红色。当②区域中存在红胶色彩特征时,则判定为“溢胶”。该算法在算法选
择中的标志为“Glue”。
1.3.8. Hole 算法
算法算法
算法
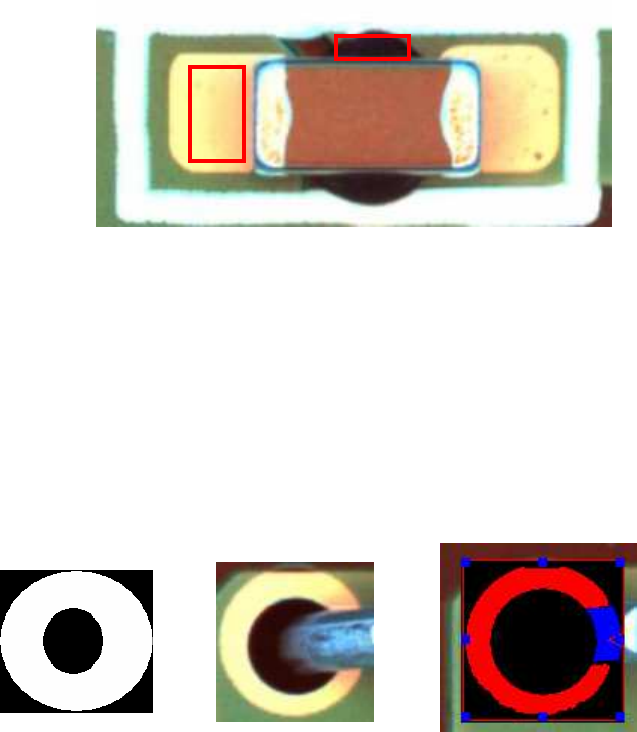
Hole 算法,是指在红胶板检测中,检测 DIP 元件插孔是否具备插件的一种有效的图像处理算法。该算法
分为二个步骤。首先是椭圆圆环定位,该定位方式是在椭圆中屏蔽插圆形孔区域,建立搜索模板,如下:
①区域为定位模板,其中白色区域为有效区域,参与搜索定位,②区域为①区域的标准原图。最后在搜索定
位后,检测插件的椭圆圆环上是否具备插件特征,见③区域,蓝色成分为引脚成分。该算法在算法选择中的
标志为“Hole”。
1.3.9. OCR 算法
算法算法
算法
OCR 算法,即字符识别算法,是专门针对字符识别和检测的一种有效的图像处理算法。OCR 算法分为 2 个
部分,首先,要训练足够的样本(8 个),生成标准字符库,供字符识别使用;再次,调用已生产的标准字符
库,对待测字符进行识别,判定待测字符是否符合标准。OCR 算法,一般应用在重要元件的识别,如 BGA、
QFP、SOP 等。
1.3.10. 短路算法
短路算法短路算法
短路算法
短路算法,是检测 ROI 区域之间是否发生链接的图像处理算法。短路算法在 AOI 中的检测可为分二种,
其一是消除背景,其二是保留背景。Aleader AOI 采用的为消除背景方式,检测 2 个检测点区域是否发生通
①
①①
①
②
②②
②
①
①①
① ②
②②
② ③
③③
③