ALeaderAOI-Ver 4.0.pdf - 第13页
1.3.13. Match2 算法 算法 算法 算法 Match2 算法, 是 Match 算法的延伸,是一 种特殊的算法。Matc h2 算法可分为基于基 板的定位方式 和非基 板的定位方式。 其中基于 基板的定位方式 是一种双定位方 式,如下 图: 上图中红色框是 基于基板 的定位框, 白色框 是基于本体的 定位, 而基于本体的定位方式 在基于基 板的定位基 础上,在限 定的搜索 范围内搜索最优 定位点。 根据两个定位框的相对偏 移…
插件的焊锡成分。
包锡,是指检测插件的引脚是否发生锡包的图像处理算法。该算法是通过分析插件的包锡区域的亮度,
来判断插件是否发生包锡。包锡的特征为插件的包锡区域的亮度大。插件的包锡区域如下图:
①图中的蓝色区域为非极性插件的包脚发生区域,②图中的蓝色区域为极性插件的包脚发生区域。默认状态,
非极性插件的包锡为“检测”状态,极性插件的包锡为非“检测”状态。
锡洞,是指检测插件的孔洞是否发生外露的图像处理算法。该算法主要是根据锡洞成分的特征,即锡洞
特征为图像的亮度低。锡洞的发生区域一般为插件焊盘的内圆区域,如下:
见上图,蓝色区域为插件的锡洞发生区域。相关参数如下:
参数
参数参数
参数 参数说明
参数说明参数说明
参数说明
蓝色上限
当前成分点中,蓝色通道为主要色彩通道,当蓝色通道的亮度值小于蓝色上限时,则该
成分点位为气孔成分点,否则为非气孔成分点。默认值为
默认值为默认值为
默认值为 30。
绿色上限
当前成分点中,绿蓝色通道为主要色彩通道,当绿色通道的亮度值小于绿色上限时,则
该成分点位为气孔成分点,否则为非气孔成分点。默认值为
默认值为默认值为
默认值为 70。
红色上限
当前成分点中,红色通道为主要色彩通道,当红色通道的亮度值小于红色上限时,则该
成分点位为气孔成分点,否则为非气孔成分点。默认值为
默认值为默认值为
默认值为 90。
1.3.12. PIN 算法
算法算法
算法
PIN 算法是组合算法,是集定位算法和抽取色彩算法一起的图像处理算法。PIN 算法中有 2 个 ROI 框。其
一为定位框,其二为焊锡区域框如下:
见上图,红色区域为引脚定位框,作用是用于定位;蓝色区域为焊锡分析框,作用是分析焊锡的各种 NG 类
型。
①
①①
①
②
②②
②
1.3.13. Match2 算法
算法算法
算法
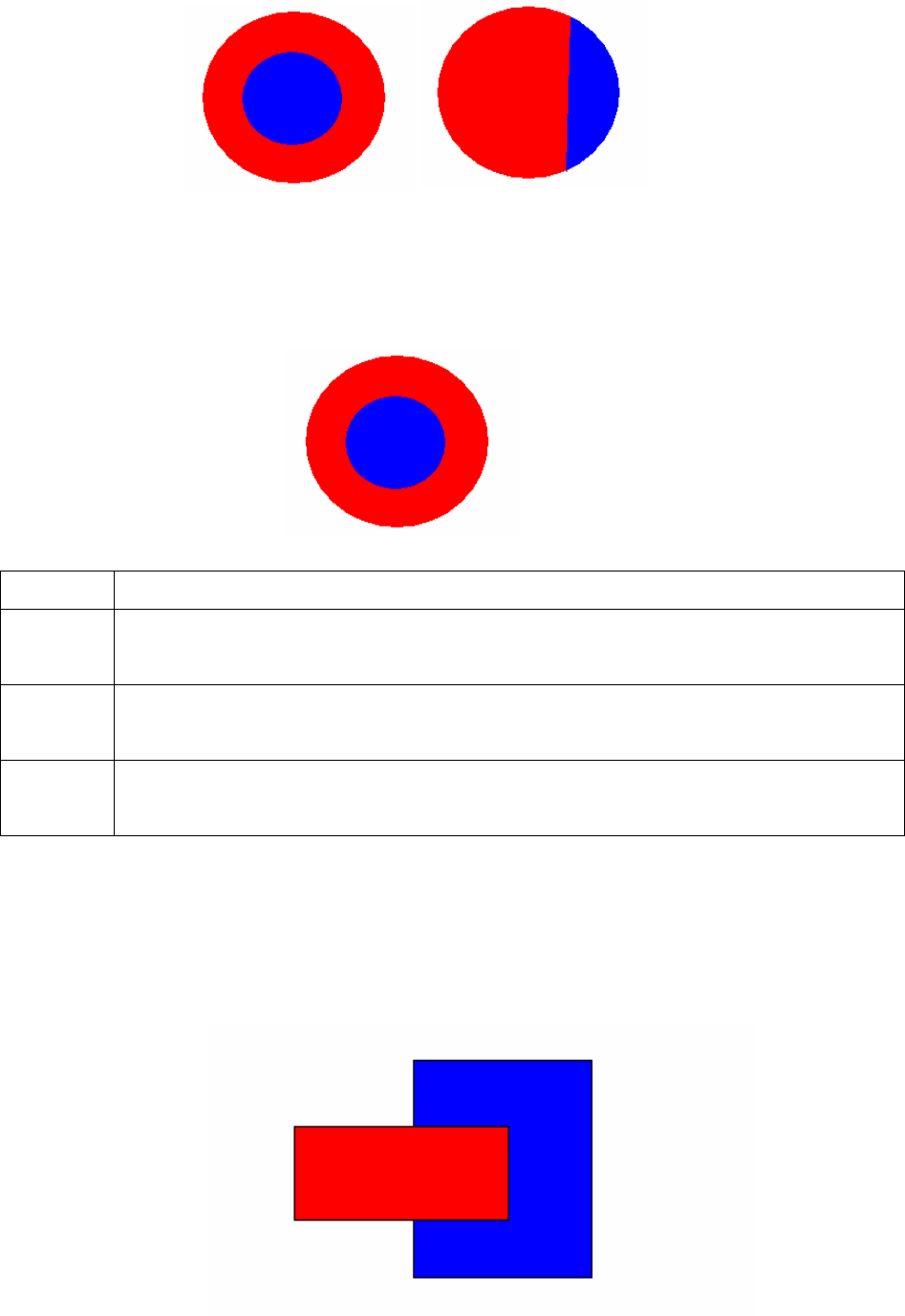
Match2 算法,是 Match 算法的延伸,是一种特殊的算法。Match2 算法可分为基于基板的定位方式和非基
板的定位方式。其中基于基板的定位方式是一种双定位方式,如下图:
上图中红色框是基于基板的定位框,白色框是基于本体的定位,而基于本体的定位方式在基于基板的定位基
础上,在限定的搜索范围内搜索最优定位点。根据两个定位框的相对偏移,计算其相对偏移值,作为真实偏
移值。其偏移值的计算示意图如下:
上图中①为标准示意图,②为待测偏移示意图。如①区域中基板定位框的中心点坐标为(X, Y),本体定位
框的中心点坐标为(X1, Y1)。则标准相对偏移为(DDx, DDy),则计算公式如下:
DDx = X1 – X
DDy = Y1 – Y
当待测本体定位框偏离待测基本定位框(DDx, DDy)时,则实际偏移为(0, 0)。B 区域中基板定位框的中
心点坐标为(XX, YY),本体定位框的中心点坐标为(XX1, YY1)。则标准相对偏移为(DDx1, DDy1),则计
算公式如下:
DDx1 = XX1 – XX
DDy1 = YY1 – YY
则待测元件的实际偏移为(Dx, Dy),计算公式如下:
Dx = DDx1 – DDx
Dy = DDy1 – DDy
通过判断(Dx,Dy)的范围来确定元件是否发生偏移。
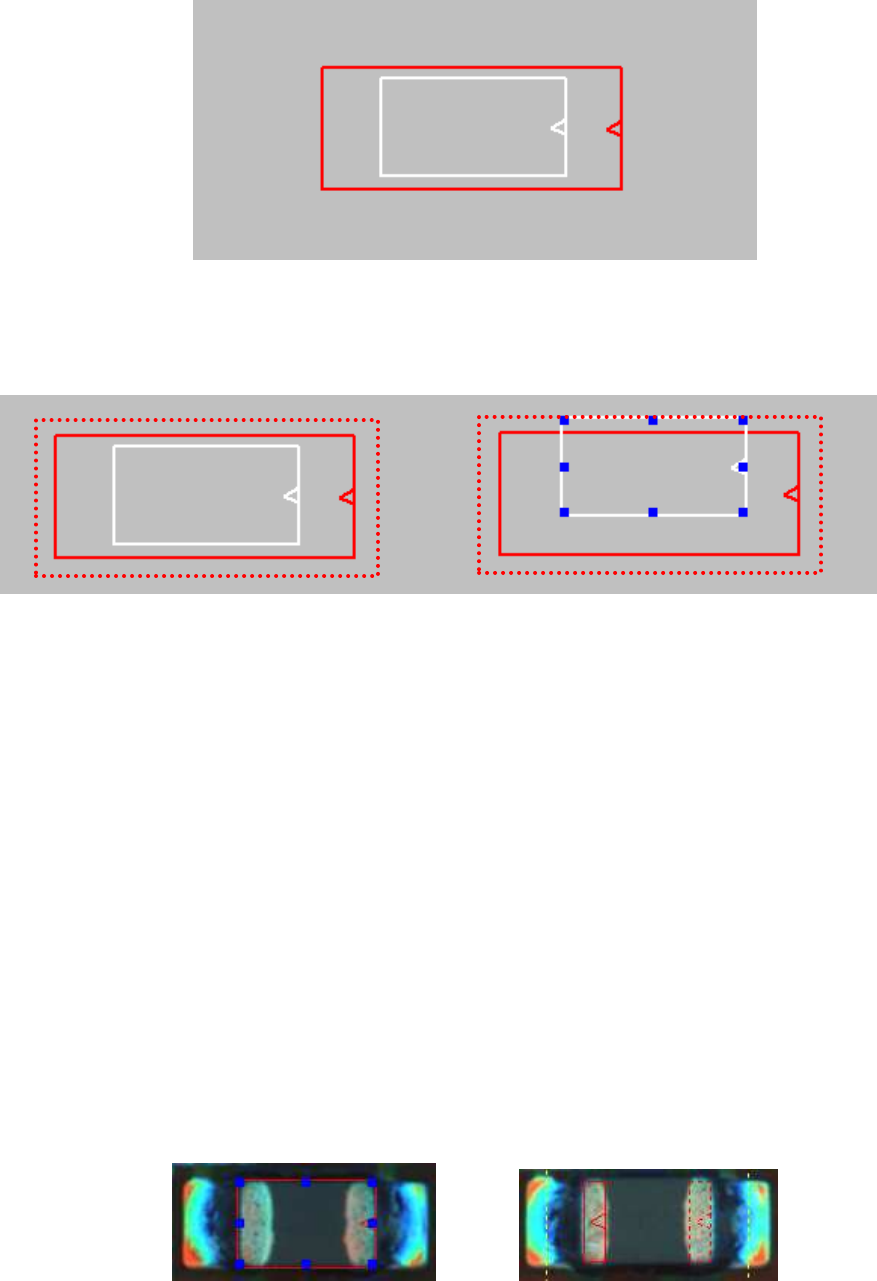
Match2 算法中基于本体框的定位模式有两种,分为为单框定位模式和双框组合定位模式。如下:
上图中①为单框定位模式,与 Match 算法一致;②为双框组合定位模式,定位区域由 B 区域中的实线单框和
虚线单框组合而成,两个框的组合区域为有效定位区域。
①
①①
①
②
②②
②
①
①①
①
②
②②
②
1.3.14.
..
. Pole 算法
算法算法
算法
Pole 算法,是专门针对电容缺件的图像处理算法。它是通过比对标准电容两个电极的外接矩形和待测
电容两个电极的外接举行的面积差异,来判断和检测电极是否发生缺件。如下示意:
上图为发生缺件时的元件示意图,①为正常元件的两端高亮电极区域的外接矩形,②为发生缺件时的两端高
亮区域的外接矩形,则 Pole 算法下的差异值如下:
Result = (
((
(S2 - S1)
))
)/ S1 – 1
其中 S2 为外接矩形 B 的面积,S1 为外接矩形 A 的面积。
提示
提示提示
提示:
::
:Pole 算法的默认判定范围为
算法的默认判定范围为算法的默认判定范围为
算法的默认判定范围为(
((
(0,
,,
, 35)。
)。)。
)。
1.3.15
.
IC 算法
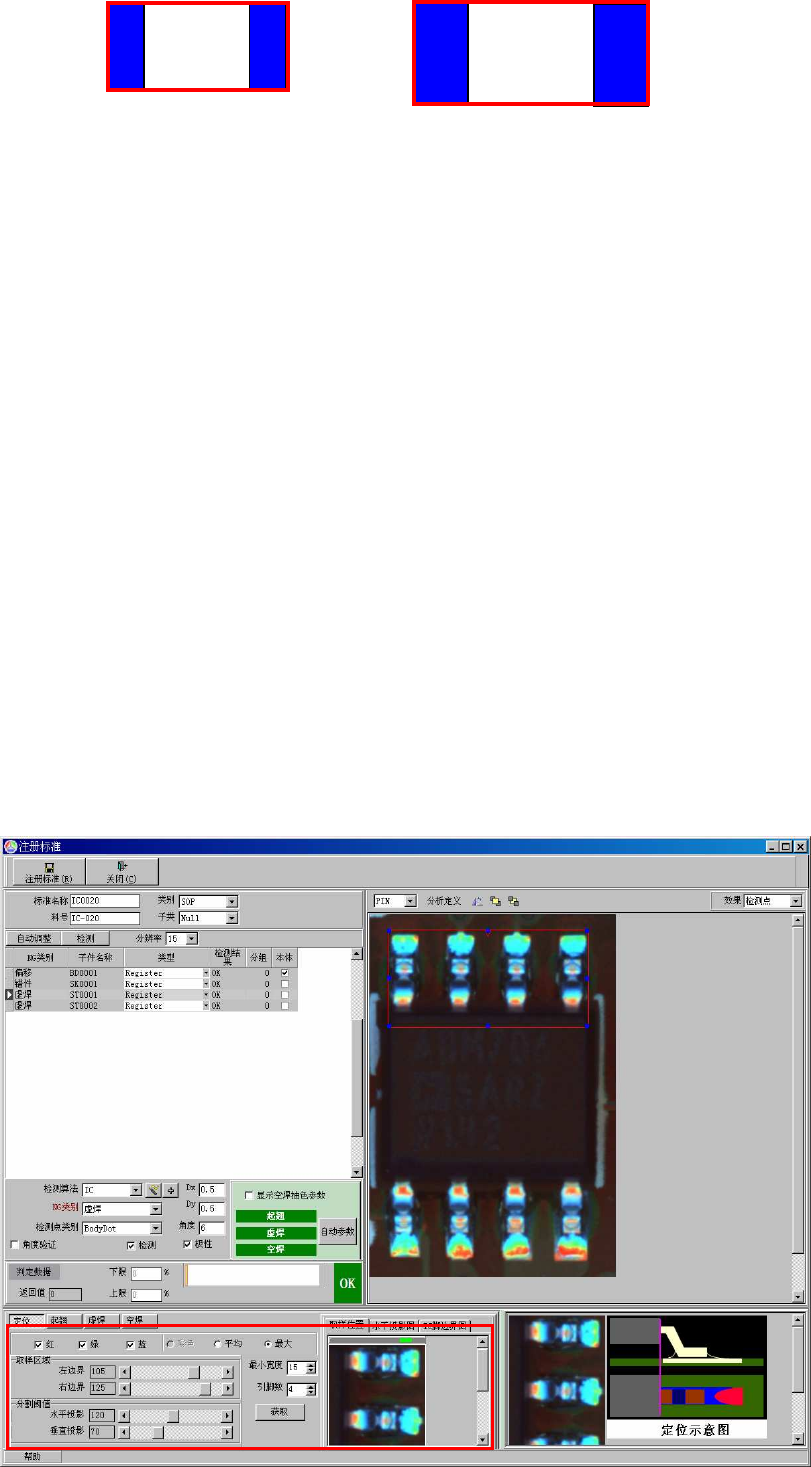
IC 检测算法,是通过检测 IC 引脚的长度、IC 引脚与焊盘的交界区域和空焊发生区域,来检测 IC 是否发
生起翘、虚焊和空焊等。IC 检测算法是基于灰阶、形状和色彩的综合类图像处理算法。包括定位、起翘、虚
焊和空焊等检测项。在算法列表中的标志为“IC”。
IC 检测算法适用于大部分 IC 类,它是现有算法集中的有效补充。当 IC 发生严重起翘时,起翘 IC 的引
脚的长度要明显长于标准的 IC 引脚;当 IC 发生轻微的起翘,引起焊锡不良时,该 IC 引脚与焊盘的交界区
域的形状明显异于标准,或者焊盘宽度明显小于标准;当 IC 引脚的焊盘无焊锡,或者少锡时,该引脚的焊
盘区域的红色成分比例增多。通过上述 NG 现象,作为判断 IC 的基准出发点。
IC 注册界面包括定位、起翘、虚焊和空焊等子界面,调节标准参数步骤,依次是定位、起翘、虚焊和空
焊。具体操作如下:
定位,是指将 IC 引脚单个独立分割、区分引脚与本体的交界线,是 IC 检测的前提,如下:
①
①①
①
②
②②
②