ALeaderAOI-Ver 4.0.pdf - 第31页
此窗口可查看或 设定如下 系统参数: (1) 查看相机 的摄像范围( 从而可知相 机拍摄每幅图 像的总像素为 : 长 * 宽,也 就是知道相 机是 500 万像素, 200 万像素等等 ) ; (2) 显示范围是指测试时的有效范 围(因为在测试时会切除图像边缘以提高图像质量 ,从而获得更好的检 测 效果) ; (3) 摄像头标 定参数,即 1mm 相当于多少个像 素 (3.1) 标 准 比 例 : 66.67 , 即 1mm 相 当 于…
2.2. 系统参数设定
系统参数设定系统参数设定
系统参数设定
2.2.1 系统原始参数设定
系统原始参数设定系统原始参数设定
系统原始参数设定
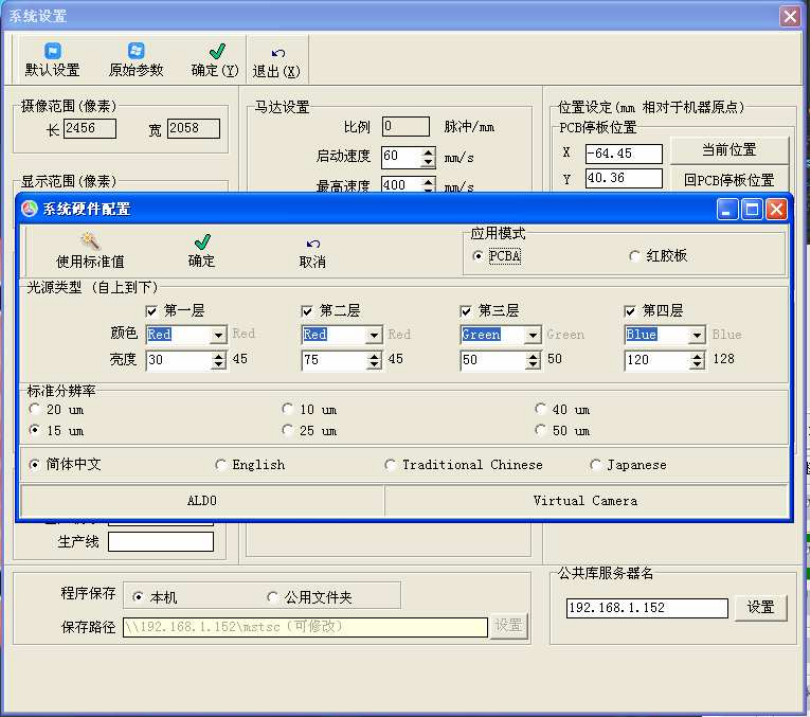
用于设定如下功能:
(1) 拍照时光源需要开启哪几层(自顶向下分为四层, 标准配置为 RRGB);
(2) 每一层的颜色是哪种(总有四种颜色可选:Red, Green, Blue, White);
(3) 每二层开灯时的标准亮度,可以通过点击按钮”PCBA”, “红胶板”, “炉前锡膏”来自动设定标准亮度;
(4) 相机装配的标准分辨率,共有六种分辨可选(20u, 10u, 40u,15u,25u,50u);
(5) 软件的语言选择,共有四种语言可选(简体中文,英文,繁体中文,日语);
设定好后按确定可以保存设置,当然如果设定不正确可以取消。
2.2.2 系统参数设定
系统参数设定系统参数设定
系统参数设定
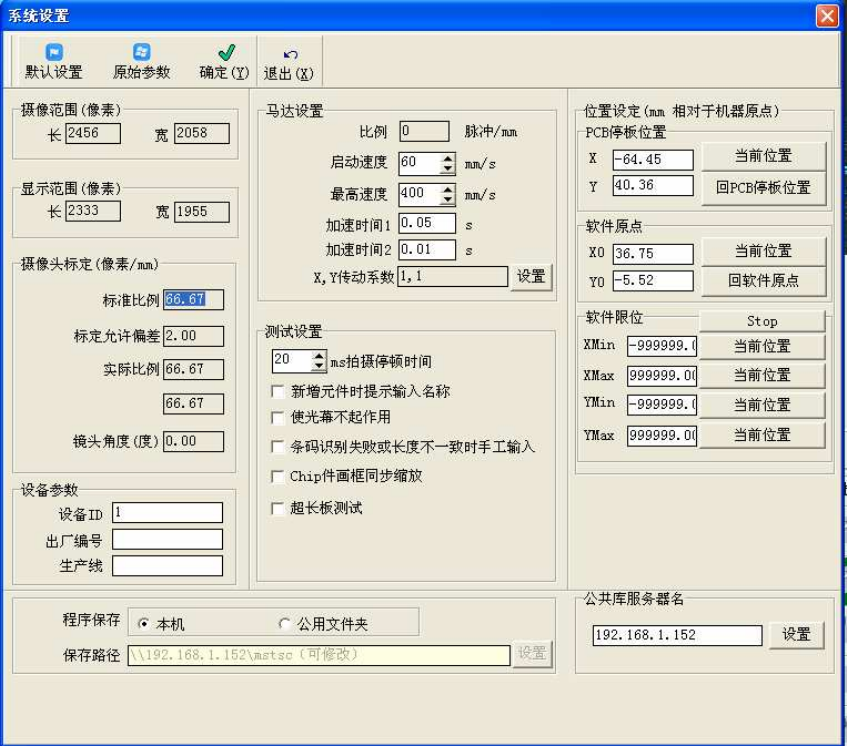
此窗口可查看或设定如下系统参数:
(1) 查看相机的摄像范围(从而可知相机拍摄每幅图像的总像素为: 长*宽,也就是知道相机是 500 万像素,
200 万像素等等);
(2) 显示范围是指测试时的有效范围(因为在测试时会切除图像边缘以提高图像质量,从而获得更好的检测
效果);
(3) 摄像头标定参数,即 1mm 相当于多少个像素
(3.1) 标 准 比 例 : 66.67 , 即 1mm 相 当 于 66.67 个 像 素 , 从 而 可 计 算 出 相 机 分 辨 率 为 :
1mm/66.67=1000u/66.67=15u
(3.2) 标定允许偏差:2.00, 因为装配会存在误差,所以实际比例与标准比例之间会有差异,但差异不能
大于标定允许偏差;
(3.3) 实际比例:66.67, 通过标定得到的实际像素比;
(3.4) 镜头角度:0.00, 通过标定得到的相机在水平方向的安装角度;
(4) 马达参数设置
(4.1) 比例:指发送多少个脉冲让镜头移动 1mm
(4.2) 启动速度: 指马达起始速度
(4.3) 最高速度: 马达运动时的最高速度
(4.4) 加速时间 1: 加速总时间
(4.5) 加速时间 2: 加速时 S 段所用时间
(4.6) 传动系数: 马达实际移动距离与计数器所指示的数值比率
(5) 设备参数:
(5.1) 设备 ID: 机器设备的一个顺序编号
(5.2) 出厂编号: 机器设备的出厂编号
(5.3) 生产线: 机器所罢放的生产线编号
(6) 测试设置:
(6.1) 拍摄停顿时间: 指运动停止后, 再等待多久才开始拍照, 因为信号反馈运动已经停止与真正停止是有
差异的;
(6.2) 新增元件时提示输入元件名称: 是否在每次新增元件时提示输入元件名称;
(6.3) 使光幕不起作用: 即使光幕被挡也不暂停, 此功能有风险, 要慎用;
(6.4) 采用旧光源控制: 采用以前版本的光源控制方式;
(6.5) 条码识别失败或长度不一致时手工输入: 设置手工输入条码的条件是否启用;
(7) PCB 停板位置设置
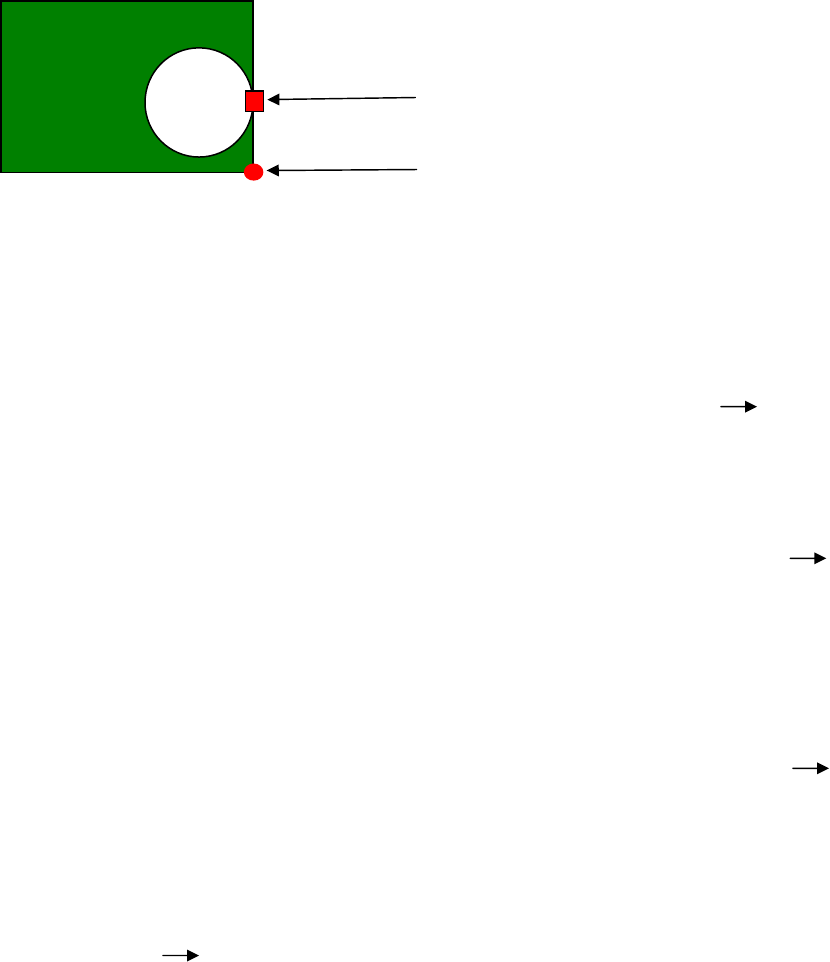
(7.1) 在线机: 1.停板位置:指的是进板时停板感应器所在位置。(停板感应器安装在光源外壳右侧面上, 见
示意图 2.1)。
2.设定方法:首先,返回程序界面,按左右移动 XY 平台按钮(方向箭头图标指示)移动光源,
直至停板感应器外侧面与轨道夹板右侧切面平行对齐;然后,点击菜单[系统设置] [系
统设置] 打开系统参数设定界面,在“PCB 停板位置”选项中点击“当前位置”按钮,系
统自动计算当前位置坐标值,最后点击保存即可。
(7.2) 离线机:1. 停板位置:指的是放板时 X / Y 平台停止位置(一般设在押扣正好完全打开的位置)。
2. 设定方法: 首先,返回程序界面,按前后移动 XY 平台按钮(方向箭头图标指示)调整
X/Y 平台,直至装载 PCB 板治具押扣正好完全打开的位置;然后,点击菜单[系统设置]
[系统设置] 打开系统参数设定界面,在“PCB 停板位置”选项中点击“当前位置”按钮,
系统自动计算当前位置坐标值,最后点击保存即可。
(8) 软件原点设定
(8.1) 分在线机与离线机设置不同, 在线机通常设在 PCB 板的右下角, 离线机设在 PCB 板左下角。
(8.2) 在线机设定方法:首先,返回程序界面,放入 PCB 板,点击状态栏“显示十字”按钮,即显示相机
镜头中心坐标;其次,按移动 XY 平台按钮(方向箭头图标指示)移动十字架中心到 PCB 板
右下角(即 PCB 板与轨道夹板边线成直角交叉点处)顶点坐标处;最后,点击菜单[系统设置]
[系统设置] 打开系统参数设定界面,在“软件原点”选项中点击“当前位置”按钮,取得
当前位置坐标(即软件原点坐标值),并保存。
(8.3) 离线机设定方法:首先,返回程序界面,放入 PCB 板,PCB 板左下角顶点至 PCB 板治具左下角一
个固定押扣点处,点击状态栏“显示十字”按钮,即显示相机镜头中心坐标;其次,按移
动 XY 平台按钮(方向箭头图标指示)移动十字架中心到 PCB 板左下角顶点坐标处;最后,
点击菜单[系统设置] [系统设置] 打开系统参数设定界面,在“软件原点”选项中点
击“当前位置”按钮,取得当前位置坐标(即软件原点坐标值),并保存。
(9) 软件限位: 设定软件限位, 使机器多一重保护;
(10) 离线调试数据保存路径: 通过”设置”, 可指定离线调试数据保存的位置;
(11) 公共库服务器名: 通过”设置”, 可指定存放公用标准所在的服务器的 IP 或电脑名称, 如下图;
PCB 板
光源
感应器
示意图 2.1
软件原点