ALeaderAOI-Ver 4.0.pdf - 第12页
插件的焊锡成分 。 包锡,是指检测 插件的引 脚是否发生锡包 的图像处理算法 。该算法 是通过分析插件 的包锡区 域的亮度 , 来判断插件是否 发生包锡 。包锡的特征为 插件的包锡区域 的亮度大 。插件的包锡区 域如下图 : ①图中的蓝色区 域为非极 性插件的包脚发 生区域, ②图中的蓝色区 域为极性 插件的包脚发生 区域。 默认状态, 非极性插件的包 锡为“检 测”状态,极性 插件的包锡为非 “检测” 状态。 锡洞,是指 检测插件 的…
路。如下:
①与②之间没有发生短路。而③与④之间发生了短路。短路算法在算法选择的标志是为“Short”。
1.3.11. CREST 算法
算法算法
算法
CREST 算法,是波峰焊检测中关于插件检测的图像处理算法。CREST 算法,是一个综合性的算法,包括
定位、无引脚、少锡、包锡和锡洞等检测项,每个检测项针对不用的检测算法。
波峰焊的插件可分为非极性插件、极性插件和不定向插件。非极性插件是指的引脚方向是垂直向上的,
并且方向固定的插件;极性插件是指引脚方向斜向下,并且方向固定的插件;不定向插件是指引脚方向不固
定的插件。在插件检测中,可分为非极性插件检测、极性插件检测和不定向插件检测。
定位,波峰焊中的插件变化大,常规的定位方式不适合 插件的定位,所以 CREST 的定位算法,为特色
的定位的方式。该定位方式分为 2 步,其一是创建定位模板,该定位模板一般为椭圆形;其二是提取焊锡,
将焊锡之外的色彩设置为背景。利用在提取焊锡的搜索图中查找与模板拟合最好的区域。提取焊锡的参数如
下:
类型
类型类型
类型 参数说明
参数说明参数说明
参数说明
蓝色下限
当前成分点中,蓝色通道为主要色彩通道,当蓝色通道的亮度值大于蓝色下限时,则该
成分点位为焊盘成分点,否则为背景成分点。默认值为
默认值为默认值为
默认值为 60,最小可降低至 40。
绿色下限
当前成分点中,绿色通道为主要色彩通道,当绿色通道的亮度值大于绿色下限时,则该
成分点位为焊盘成分点,否则为背景成分点。默认值为
默认值为默认值为
默认值为 220。
红色下限
当前成分点中,红色通道为主要色彩通道,当红色通道的亮度值大于红色下限时,则该
成分点位为焊盘成分点,否则为背景成分点。默认值为
默认值为默认值为
默认值为 230。
亮度上限
当前成分点中,最小通道值小于亮度上限时,则该成分点位焊盘成分点,否则为背景成
分点。默认值为
默认值为默认值为
默认值为 255,当背景有高亮度白色背景时,可降低该参数,过滤白色背景。
无引脚,是指检测波峰焊插件中是否具备引脚的图像处理算法。该算法是检测插件的引脚发生区域是否
具备引脚,如下图:
见上图,①图中的蓝色区域为非极性插件的引脚发生区域,②图中的蓝色区域为极性插件的引脚发生区域。
引脚发生区域中引脚成分的抽取是采用色彩抽取算法,引脚成分的色彩特征是色彩亮度低,并且色彩的色度
为蓝色。利用该特征,确定抽色参数,抽取引脚成分。
少锡,是指检测插件的焊盘的焊锡量是否足够的图像处理算法。该算法采用的色彩抽取算法。焊锡在波
峰焊的特征为图像具备一定的亮度,并且色度偏青色、偏蓝色。根据焊锡的色彩特征,确定抽色参数,抽取
①
①①
①
②
②②
②
③
③③
③ ④
④④
④
①
①①
①
②
②②
②
插件的焊锡成分。
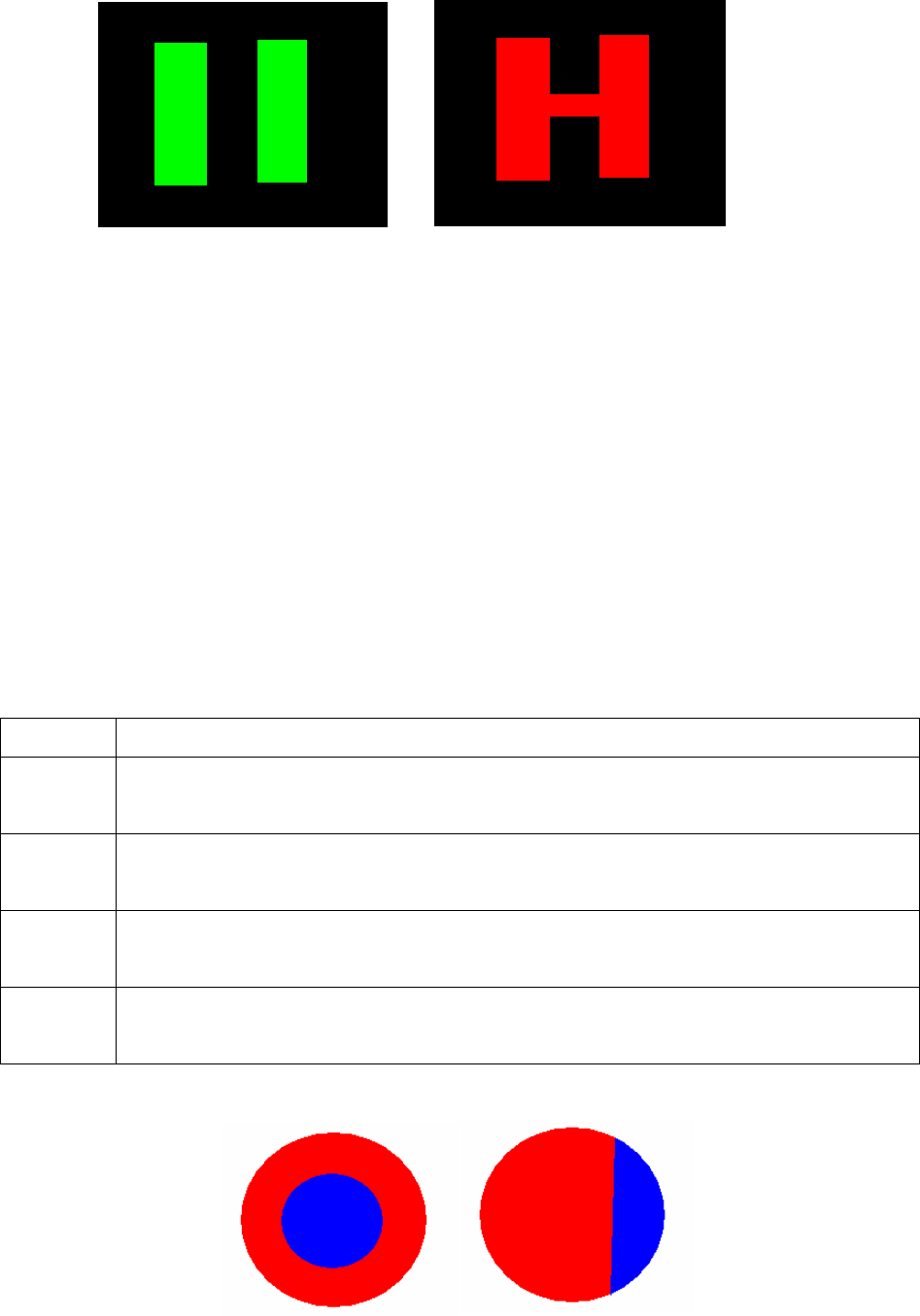
包锡,是指检测插件的引脚是否发生锡包的图像处理算法。该算法是通过分析插件的包锡区域的亮度,
来判断插件是否发生包锡。包锡的特征为插件的包锡区域的亮度大。插件的包锡区域如下图:
①图中的蓝色区域为非极性插件的包脚发生区域,②图中的蓝色区域为极性插件的包脚发生区域。默认状态,
非极性插件的包锡为“检测”状态,极性插件的包锡为非“检测”状态。
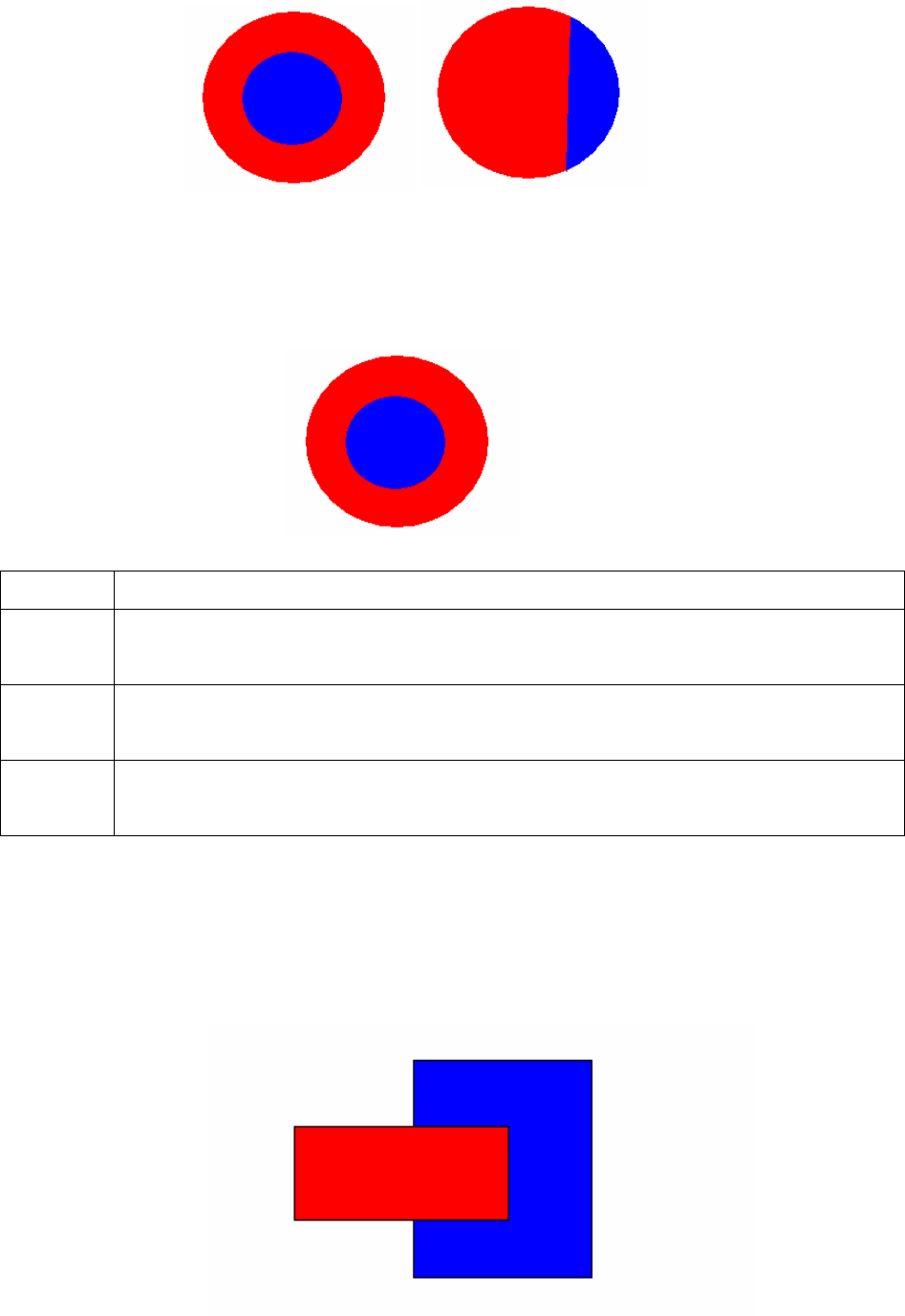
锡洞,是指检测插件的孔洞是否发生外露的图像处理算法。该算法主要是根据锡洞成分的特征,即锡洞
特征为图像的亮度低。锡洞的发生区域一般为插件焊盘的内圆区域,如下:
见上图,蓝色区域为插件的锡洞发生区域。相关参数如下:
参数
参数参数
参数 参数说明
参数说明参数说明
参数说明
蓝色上限
当前成分点中,蓝色通道为主要色彩通道,当蓝色通道的亮度值小于蓝色上限时,则该
成分点位为气孔成分点,否则为非气孔成分点。默认值为
默认值为默认值为
默认值为 30。
绿色上限
当前成分点中,绿蓝色通道为主要色彩通道,当绿色通道的亮度值小于绿色上限时,则
该成分点位为气孔成分点,否则为非气孔成分点。默认值为
默认值为默认值为
默认值为 70。
红色上限
当前成分点中,红色通道为主要色彩通道,当红色通道的亮度值小于红色上限时,则该
成分点位为气孔成分点,否则为非气孔成分点。默认值为
默认值为默认值为
默认值为 90。
1.3.12. PIN 算法
算法算法
算法
PIN 算法是组合算法,是集定位算法和抽取色彩算法一起的图像处理算法。PIN 算法中有 2 个 ROI 框。其
一为定位框,其二为焊锡区域框如下:
见上图,红色区域为引脚定位框,作用是用于定位;蓝色区域为焊锡分析框,作用是分析焊锡的各种 NG 类
型。
①
①①
①
②
②②
②
1.3.13. Match2 算法
算法算法
算法
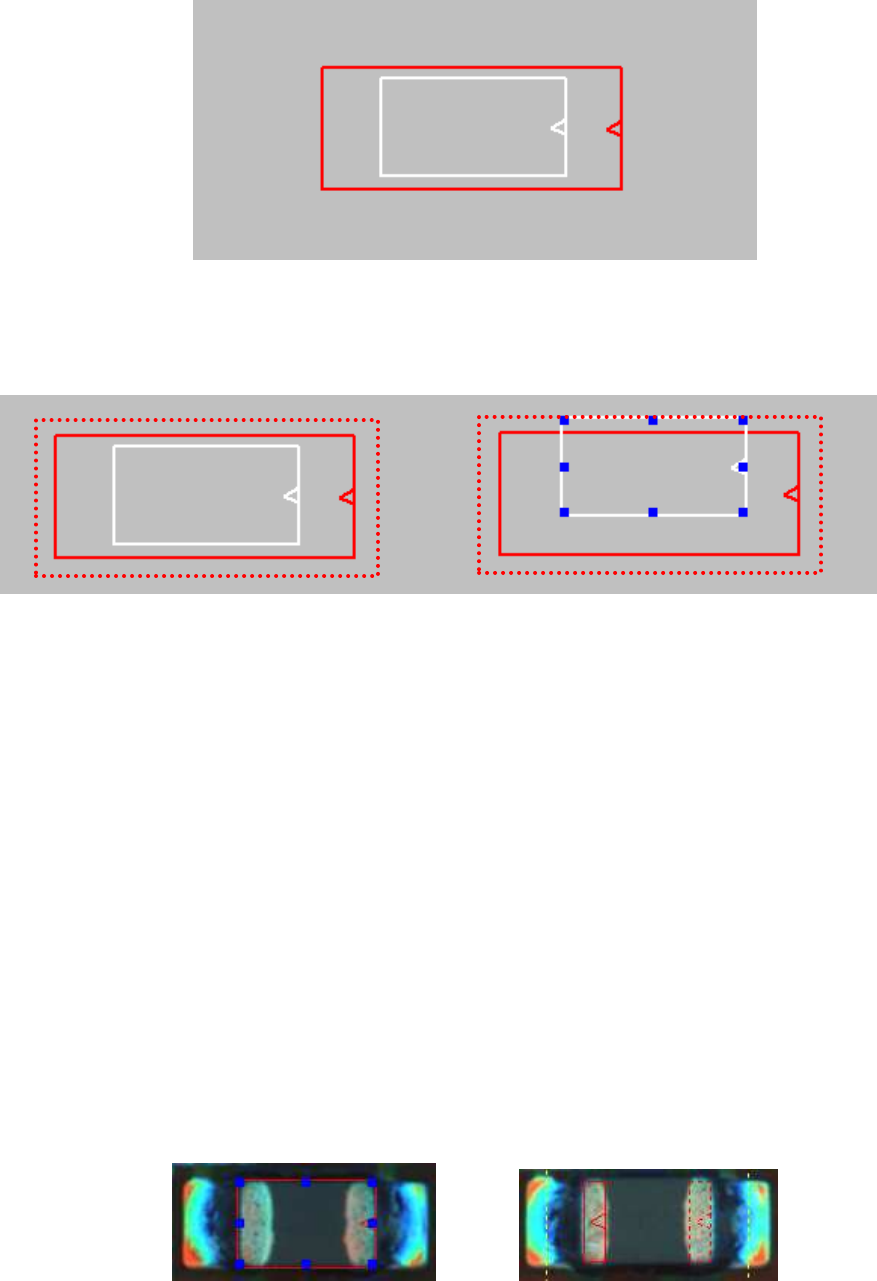
Match2 算法,是 Match 算法的延伸,是一种特殊的算法。Match2 算法可分为基于基板的定位方式和非基
板的定位方式。其中基于基板的定位方式是一种双定位方式,如下图:
上图中红色框是基于基板的定位框,白色框是基于本体的定位,而基于本体的定位方式在基于基板的定位基
础上,在限定的搜索范围内搜索最优定位点。根据两个定位框的相对偏移,计算其相对偏移值,作为真实偏
移值。其偏移值的计算示意图如下:
上图中①为标准示意图,②为待测偏移示意图。如①区域中基板定位框的中心点坐标为(X, Y),本体定位
框的中心点坐标为(X1, Y1)。则标准相对偏移为(DDx, DDy),则计算公式如下:
DDx = X1 – X
DDy = Y1 – Y
当待测本体定位框偏离待测基本定位框(DDx, DDy)时,则实际偏移为(0, 0)。B 区域中基板定位框的中
心点坐标为(XX, YY),本体定位框的中心点坐标为(XX1, YY1)。则标准相对偏移为(DDx1, DDy1),则计
算公式如下:
DDx1 = XX1 – XX
DDy1 = YY1 – YY
则待测元件的实际偏移为(Dx, Dy),计算公式如下:
Dx = DDx1 – DDx
Dy = DDy1 – DDy
通过判断(Dx,Dy)的范围来确定元件是否发生偏移。
Match2 算法中基于本体框的定位模式有两种,分为为单框定位模式和双框组合定位模式。如下:
上图中①为单框定位模式,与 Match 算法一致;②为双框组合定位模式,定位区域由 B 区域中的实线单框和
虚线单框组合而成,两个框的组合区域为有效定位区域。
①
①①
①
②
②②
②
①
①①
①
②
②②
②