LsrNXT2.pdf - 第415页
8. NXT-2 软件工具 QD142-09 396 NXT II 系统手册 〈料盘单元 -L、LT〉 1 . 请 从[工 具]菜 单 中 选 择[调 整 模 式 开 始] 。 备注 )如果机器已经处于调整模式,不需要该操作。 2. 请 从 [ 菜单 ] 框内选择 [ 操作 ]-[ 料盘单 元 L]-[ 动作系 ],接着,选择 动作项目。 3. 请点击 [ 开始 ]。关于开始后的各 动作,请参照 "8.9.7 指令列表 (料盘…
QD142-09 8. NXT-2 软件工具
NXT II 系统手册 395
〈基座、模组〉
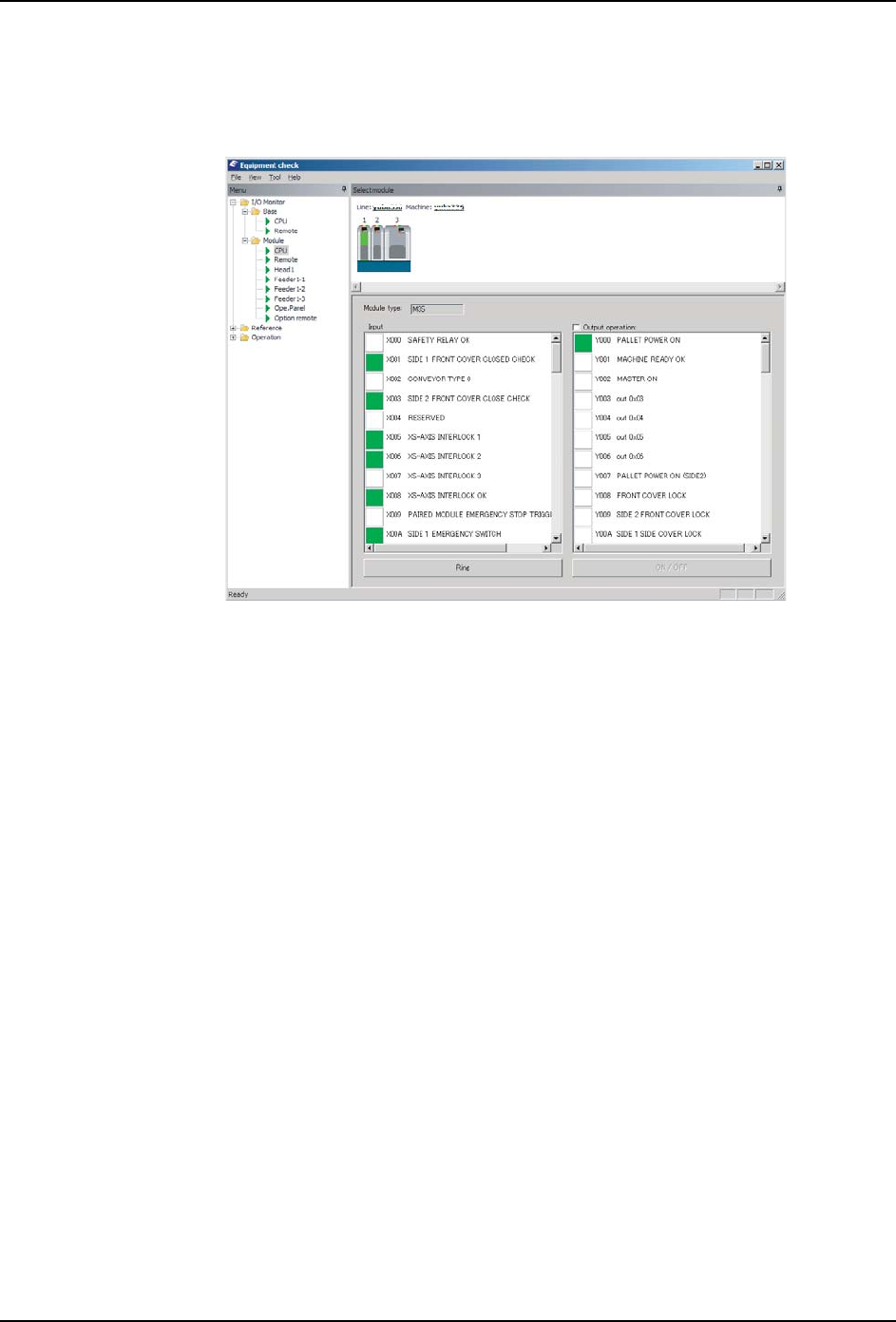
1. 请从[菜单]框内选择[I/O监视器]-[基座]或[模组],然后选择各项目。
2. I/O 监视器被显示。
a. [ 输入信号 ]
·绿色的指示器表示输入为 ON,白色的指示器表示输入为 OFF。
b. [ 输出操作 ]
·绿色的指示器表示输出为 ON,白色的指示器表示输出为 OFF。选择 [ 输出操作 ]
后,对象模组的各项目被锁定,能够变更输出状态。
c. [ 铃声设定 ]
·能够设定成当输入为 ON 时发出铃声。在选择了想要发出铃声的 I/O 项目后,请单
击[设定铃声]。
d. [ON 或者 OFF]
·在切换输出状态时使用。选择[输出操作]并选择I/O项目后,请单击[ON或者OFF]。
8.9.5 确认各单元的动作
〈搬运轨道〉
1. 请从 [ 菜单 ] 框内选择 [ 操作 ]-[ 搬运轨道 ]-[ 动作系 ],接着,选择动作项目。
2. 在 [ 选择通道 ] 对话框内选择要执行的通道。
3. 机器启动后如果还没有按下过 START 按钮时,请按下操作面板的 START 按钮。机器进行
电路板有无的确认。接着,按下 CYCLE STOP 按钮。
4. 请点击 [ 开始 ]。关于开始后的各动作,请参照 "8.9.9 指令列表 (搬运轨道)"。
01SYS-0346E

8. NXT-2 软件工具 QD142-09
396 NXT II 系统手册
〈料盘单元 -L、LT〉
1. 请从[工具]菜单中选择[调整模式开始]。
备注 )如果机器已经处于调整模式,不需要该操作。
2. 请从 [ 菜单 ] 框内选择 [ 操作 ]-[ 料盘单元 L]-[ 动作系 ],接着,选择动作项目。
3. 请点击 [ 开始 ]。关于开始后的各动作,请参照 "8.9.7 指令列表 (料盘单元 -L)"。
4. 在确认了动作后,请选择 [ 工具 ] 菜单的 [ 调整模式结束 ],将机器变成通常模式。
〈基座、模组〉
1. 请从[菜单]框内选择[I/O监视器]-[基座]或[模组],然后选择各项目。
2. 请选择 [ 输出操作 ]
3. 请从输出列别中选择要操作的项目。
4. 请单击 [ON 或者 OFF] 按钮。
8.9.6 设定料盘单元 -L、LT 的固有值
备注 )料盘单元 -LT 只能进行固有之的确认。
1. 请从[工具]菜单中选择[调整模式开始]。
备注 )如果机器已经处于调整模式,不需要该操作。
2. 请从 [ 菜单 ] 框内选择 [ 操作 ]-[ 料盘单元 L]-[ 固有值 ],接着,选择要设定的项目。
3. 请点击 [ 开始 ]。关于开始后的各动作,请参照 "8.9.7 指令列表 (料盘单元 -L)
""8.9.8 指令列表 (料盘单元 -LT)"。
4. 设定后,请选择 [ 工具 ] 菜单的 [ 调整模式结束 ],将机器变成通常模式。
QD142-09 8. NXT-2 软件工具
NXT II 系统手册 397
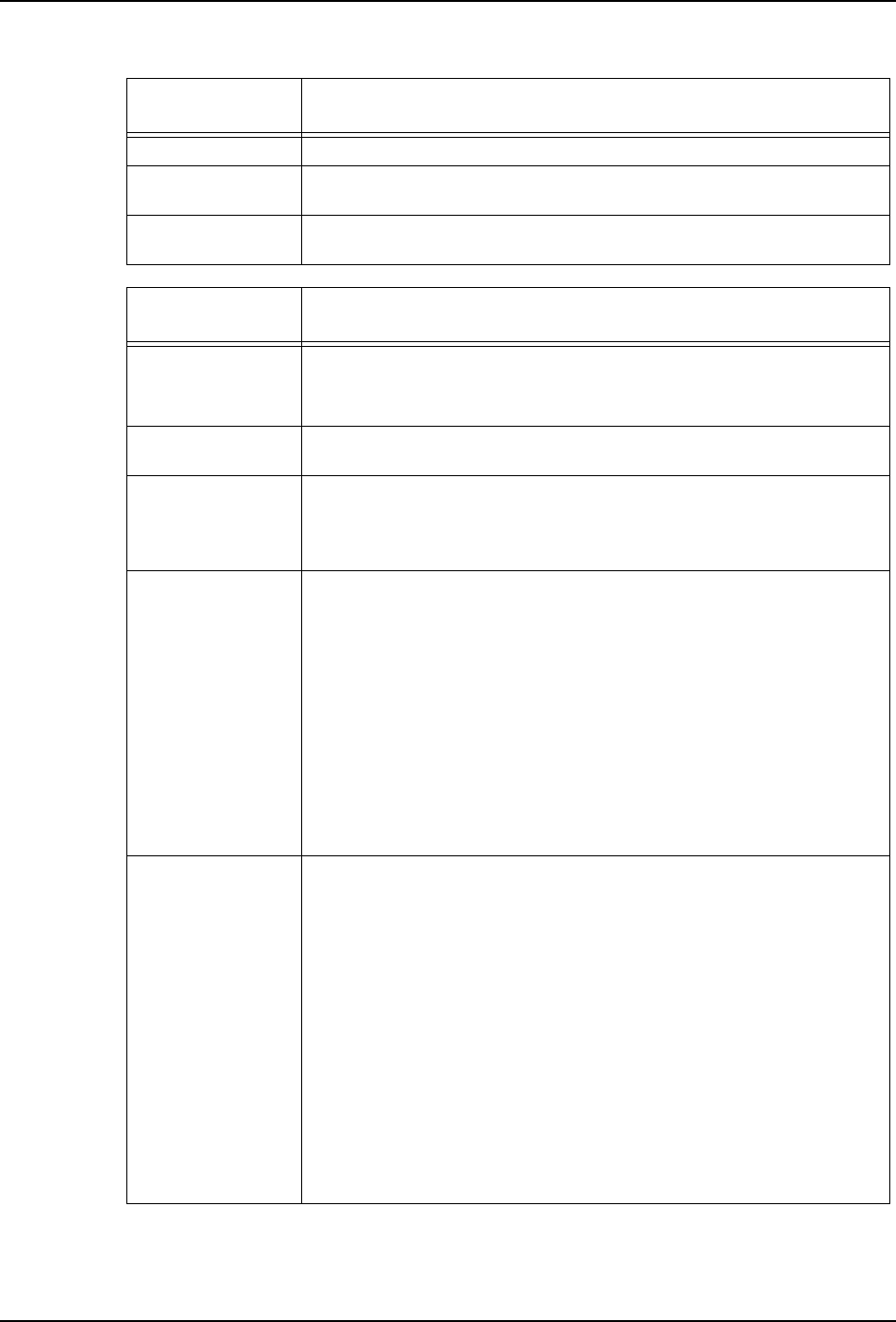
8.9.7 指令列表 (料盘单元 -L)
指令名
(信息取得)
说明
单元信息 能够确认[序列No.]和[固件版本]。
伺服计数器 能够确认现在的伺服计数器数值。
(不被实时更新)
I/O 状态确认 能够确认现在的 I/O 状态。
(不被实时更新)
指令名
(动作确认)
说明
退避位置 将 TY 轴上的托架收纳到料盘箱内,并能够确认将 TZ 轴移动到退避
位置的动作。
·如果不存在使用料盘单元 -L 的 Job 时,不动作。
元件废弃搬运轨
道
能够确认元件废弃搬运轨道的动作。指定移动距离后进行。范围是 1
~ 200 mm。
指定料槽的吸取
位置
进行将指定的料槽的托架拉到吸取位置的动作。
·仅限于 Job 中使用的料槽进行动作。
·如果料槽 21 上有托架,料槽 21 也会动作。
托架补充排出 能够确认以下的托架动作。
1. 切换指定料槽的托架。
2. 将指定料槽的托架返回到供应部。
3. 测定供应托架的高度。
4. 将料槽 0 的托架移动到排出部。
·仅限于 Job 中使用的料槽进行动作。
·如果安装了附加位置检查的料盘验证用的 ID 读取器,请使用粘
贴了位置检查用条形码的托架。如果不使用,请在拔下了 ID 读取器
的插头的状态下进行确认。
定位单动 能够确认以下的 TZ 轴、TY 轴动作。
1. 在现在的料槽位置上使往复臂前进。
2. 将料盘箱移动到指定的料槽位置。
3. 在指定的料槽位置上使往复臂前进。
4. 收纳往复臂。
5. 在料盘排出时,TY 轴移动到退避位置。
6. 使往复臂连续前后动作。
7. 使料盘箱连续上下动作。
·[ 在指定的料槽位置上使往复臂前进 ] 仅限于 Job 中使用的料槽
进行动作。