e-Series_Service_Manual_CN.pdf - 第105页
6. 故障排除 优傲 机器人 维修手册 99 维修手册 版权 © 2009 – 2020 优傲机器人公 司版权所有。保留所有权利。 C159A1 (肩部 ) 。用户指 定的有 效负载为 0kg , 请确保这 是正确 值。 指定错误的有效负载质量或重 心可能会导致机器人性能不佳 或保护性停止。 确保指定的有效负载 和重 心 正确无误。 C159A2 (肘部 ) 。用户指 定的有 效负载为 0kg , 请确保这 是正确值。 指定错误的有效负…
优傲机器人
6. 故障排除
维修手册
98
维修手册
版权 © 2009–2020 优傲机器人公司版权所有。保留所有权利。
C158A1
(肩部)。用户指定的有
效负载为 0kg,请确保这
是正确值。
指定错误的有效负载质量或重
心可能会导致机器人性能不佳
或保护性停止。
确保指定的有效负载和重心
正确无误。
C158A2
(肘部)。用户指定的有
效负载为 0kg,请确保这
是正确值。
指定错误的有效负载质量或重
心可能会导致机器人性能不佳
或保护性停止。
确保指定的有效负载和重心
正确无误。
C158A3
(手腕 1)。用户指定的
有效负载为 0kg,请确保
这是正确值。
指定错误的有效负载质量或重
心可能会导致机器人性能不佳
或保护性停止。
确保指定的有效负载和重心
正确无误。
C158A4
(手腕 2)。用户指定的
有效负载为 0kg,请确保
这是正确值。
指定错误的有效负载质量或重
心可能会导致机器人性能不佳
或保护性停止。
确保指定的有效负载和重心
正确无误。
C158A5
(手腕 3)。用户指定的
有效负载为 0kg,请确保
这是正确值。
指定错误的有效负载质量或重
心可能会导致机器人性能不佳
或保护性停止。
确保指定的有效负载和重心
正确无误。
C159A
保护性停止:位置偏离路
径
C159A0
(底座)。用户指定的有
效负载为 0kg,请确保这
是正确值。
指定错误的有效负载质量或重
心可能会导致机器人性能不佳
或保护性停止。
确保指定的有效负载和重心
正确无误。
6. 故障排除
优傲机器人
维修手册
99
维修手册
版权 © 2009–2020 优傲机器人公司版权所有。保留所有权利。
C159A1
(肩部)。用户指定的有
效负载为 0kg,请确保这
是正确值。
指定错误的有效负载质量或重
心可能会导致机器人性能不佳
或保护性停止。
确保指定的有效负载和重心
正确无误。
C159A2
(肘部)。用户指定的有
效负载为 0kg,请确保这
是正确值。
指定错误的有效负载质量或重
心可能会导致机器人性能不佳
或保护性停止。
确保指定的有效负载和重心
正确无误。
C159A3
(手腕 1)。用户指定的
有效负载为 0kg,请确保
这是正确值。
指定错误的有效负载质量或重
心可能会导致机器人性能不佳
或保护性停止。
确保指定的有效负载和重心
正确无误。
C159A4
(手腕 2)。用户指定的
有效负载为 0kg,请确保
这是正确值。
指定错误的有效负载质量或重
心可能会导致机器人性能不佳
或保护性停止。
确保指定的有效负载和重心
正确无误。
C159A5
(手腕 3)。用户指定的
有效负载为 0kg,请确保
这是正确值。
指定错误的有效负载质量或重
心可能会导致机器人性能不佳
或保护性停止。
确保指定的有效负载和重心
正确无误。
优傲机器人
6. 故障排除
维修手册
100
维修手册
版权 © 2009–2020 优傲机器人公司版权所有。保留所有权利。
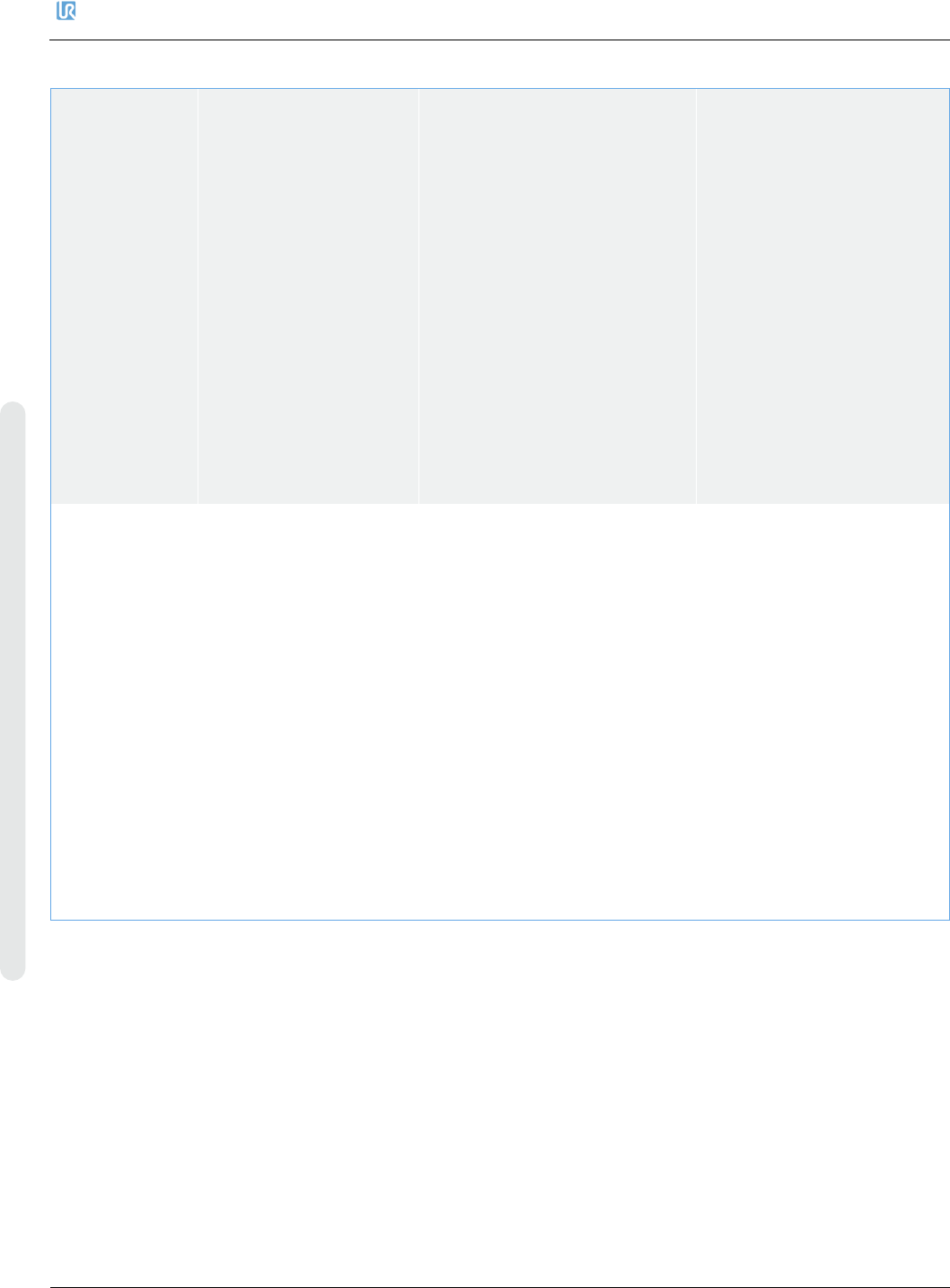
C160A
保护性停止:机器人最后
被断电是由于关节位置
不一致引起
a) 验证3D图形中的机器人
位置与实际机器人的位
置是否相符,确保编码
器在释放制动器之前正
常运行。退后并监控机
器人是否按照预期执行
第一个程序循环。
b) 如果位置不正确,则必
须修理机器人。这时,
请 点击“关闭机 器 人 (
Power Off Robot)”。
c) 如果位置正确,请勾选
3D图形下方的复选框,
然后点击“机器人位置已
验证(Robot Position
Verified)”
C161A
保护性停止:在关闭机器
人时检测到机器人出现
大幅移动。关节在关闭时
出现移动,或编码器不工
作。
a) 验证3D图形中的机器人
位置与实际机器人的位
置是否相符,确保编码
器在释放制动器之前正
常运行。退后并监控机
器人是否按照预期执行
第一个程序循环。
b) 如果位置不正确,则必
须修理机器人。这时,
请 点击“关闭机 器 人 (
Power Off Robot)”。
c) 如果位置正确,请勾选
3D图形下方的复选框,
然后点击“机器人位置已
验证(Robot Position
Verified)”