e-Series_Service_Manual_CN.pdf - 第34页
优傲机器人 4. 维修和更换零件 维修手册 28 维修手册 版权 © 2009 – 2020 优傲机器人公 司版权所有。保留所有权利。 5. 首先要拆除沉头螺钉( a ) ,然后拆 下剩余的( b )螺钉。 6. 关节现已松动,可以拆 除。记得拔出电线。 组装螺纹连接关节 组装与拆卸的顺序相反 。但是,在开始组装之前 ,还有几点 需要注意。 注意 组装关节之前, 使用滚压丝锥或成型丝锥 ( M4 用于尺寸 2 , 其余用 M3 ) , …
4. 维修和更换零件
优傲机器人
维修手册
27
维修手册
版权 © 2009–2020 优傲机器人公司版权所有。保留所有权利。
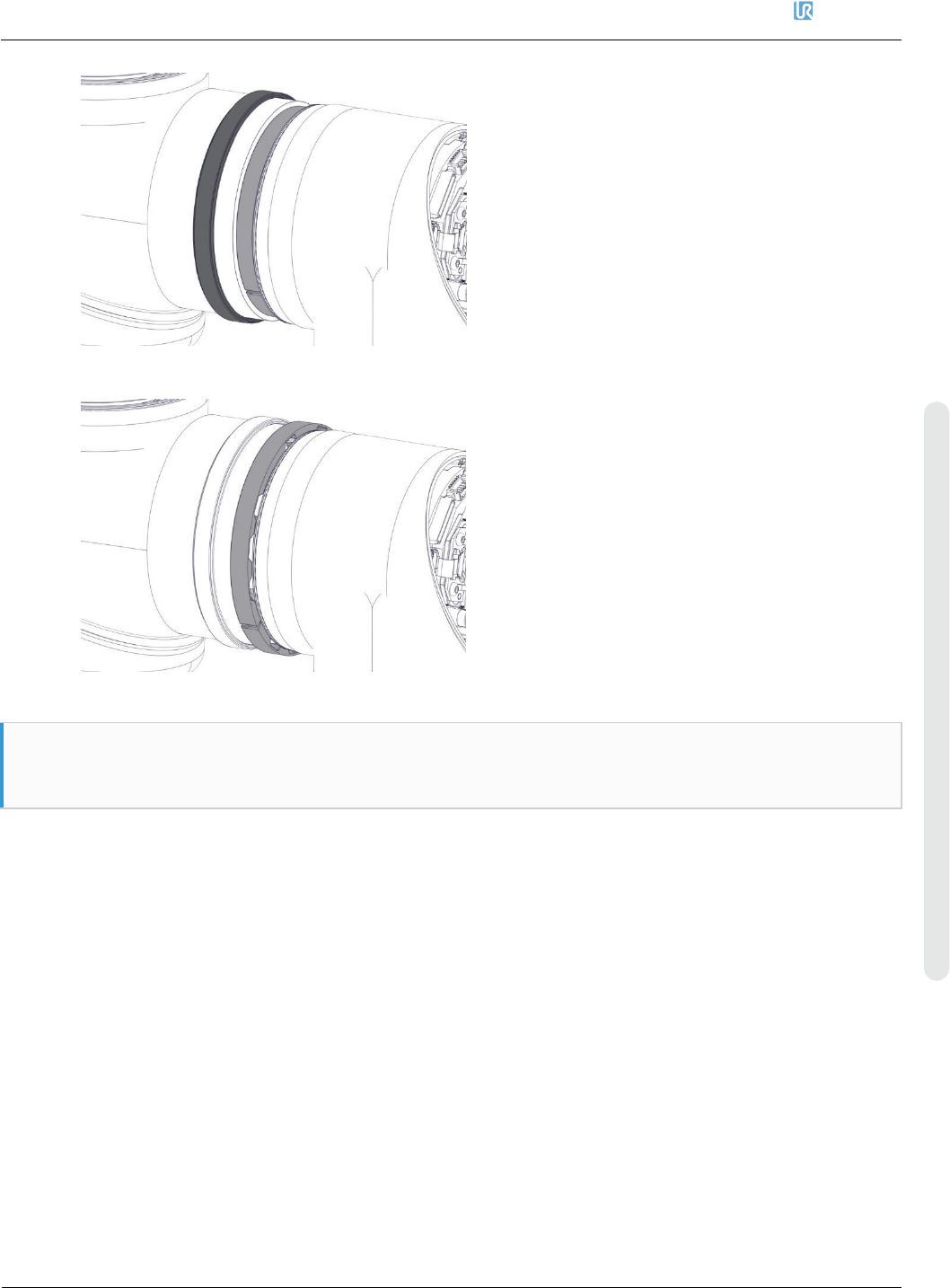
4. 取下特氟隆环。
强制措施
拆除螺钉时,如果没有支撑,关节就会脱落。
优傲机器人
4. 维修和更换零件
维修手册
28
维修手册
版权 © 2009–2020 优傲机器人公司版权所有。保留所有权利。
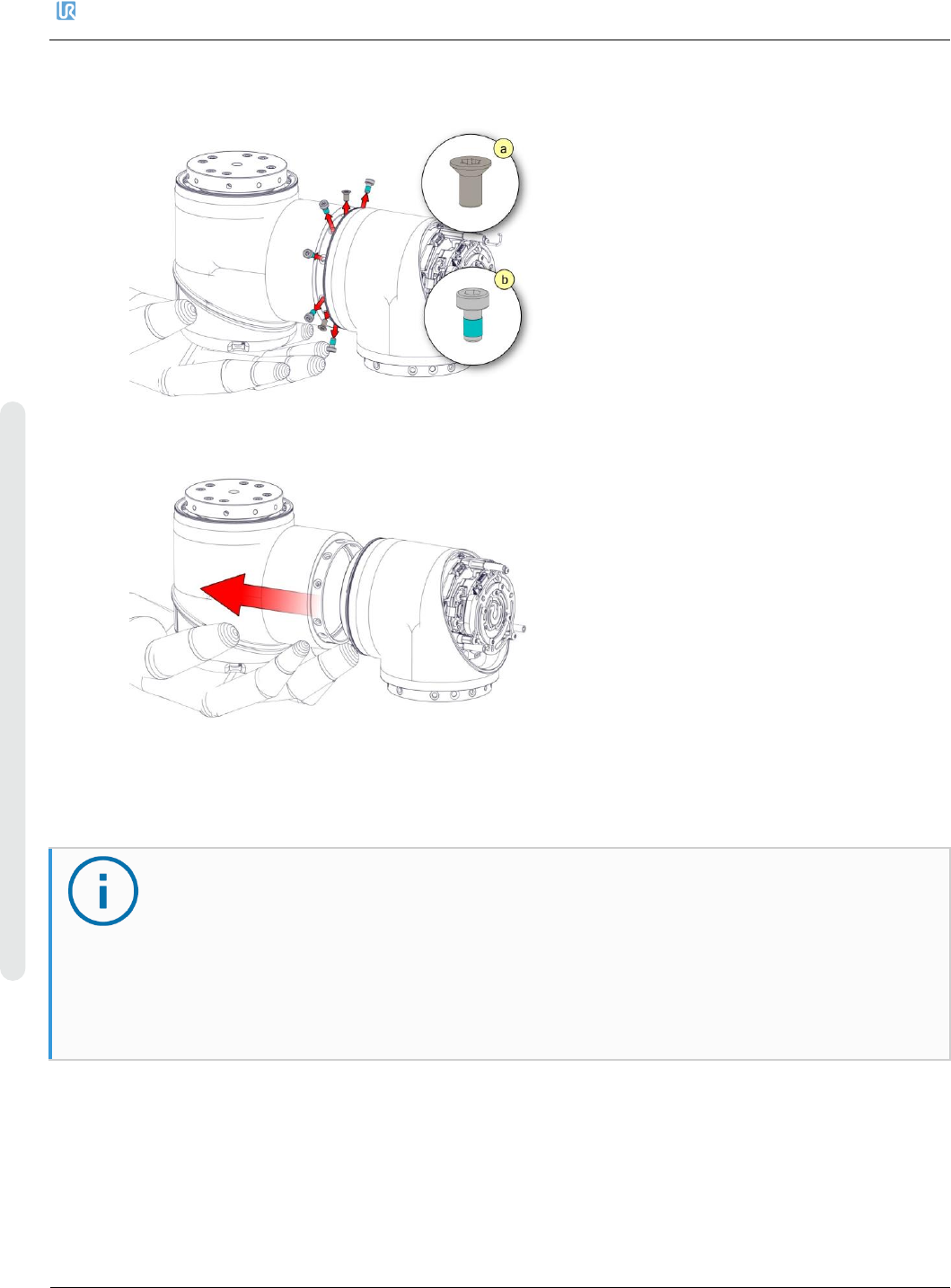
5. 首先要拆除沉头螺钉(a),然后拆下剩余的(b)螺钉。
6. 关节现已松动,可以拆除。记得拔出电线。
组装螺纹连接关节
组装与拆卸的顺序相反。但是,在开始组装之前,还有几点需要注意。
注意
组装关节之前,使用滚压丝锥或成型丝锥(M4用于尺寸2,其余用 M3),去除螺纹孔中残
留的乐泰胶,以便正确拧紧新螺钉。
尽可能使用新的预涂膜螺钉。如果必须使用旧螺钉组装,则要在组装前仔细清洁螺钉,并在
螺纹上涂抹Loctite 243。
始终要更换新的黑色柔性扁型环,以保持 IP 等级。
如果出现大面积磨损或损坏,请更换耐磨环
4. 维修和更换零件
优傲机器人
维修手册
29
维修手册
版权 © 2009–2020 优傲机器人公司版权所有。保留所有权利。
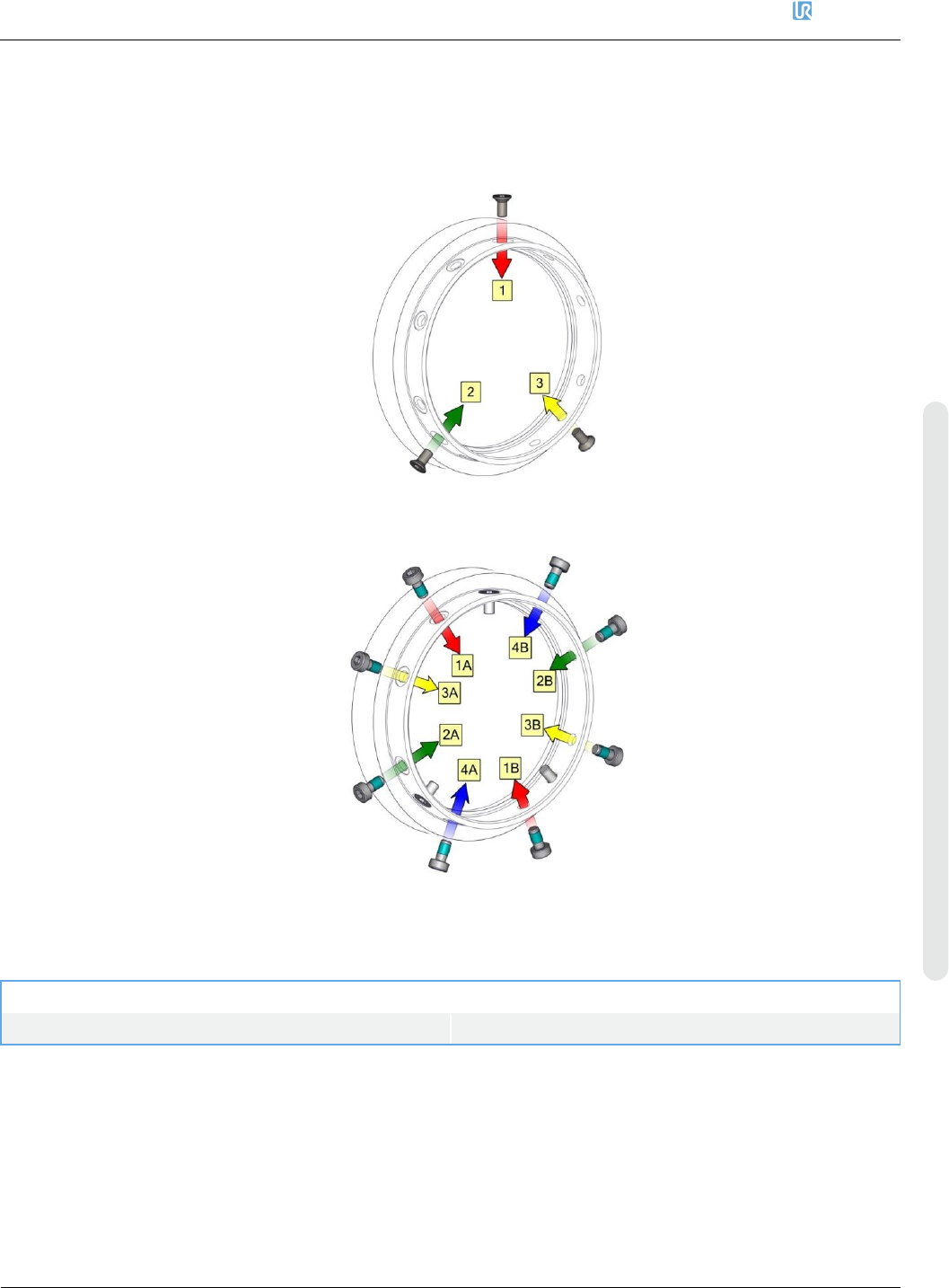
1. 根据标记(在下图中,用红色箭头表示)确定关节的方向,并将两个关节轻轻地推到一起。
2. 根据下图示例,插入六角沉头螺钉,并拧紧。不要超过建议的扭矩。
示例:1、2、3
3. 根据下图示例,插入六角螺钉,并拧紧。不要超过建议的扭矩。
示例:1A、1B、2A、2B等。
4.2.8. 支架连接
以下两节描述拆卸和组装支架连接关节的方式。
支架连接位置
UR5e
Ur10e 和 UR16e